风电机组叶片角度检测方法及装置与流程
- 国知局
- 2024-07-27 13:11:42
本发明涉及风电机组检测,具体地涉及一种风电机组叶片角度检测方法以及一种风电机组叶片角度检测装置。
背景技术:
1、风力发电机的核心部件是风轮,而叶片是风轮的关键部件之一。叶片是具有空气动力形状,接受风能使风轮绕其轴转动的主要构件,叶片气动不平衡是影响风电机组的可靠性和风能利用的经济性的关键参数之一。尤其对于大型柔性叶片来说,由于叶片制造误差,安装调试误差,控制执行累积误差以及叶片状态等因素,风机的三支叶片常存在明显的零度桨距角差异,这将会导致气动不平衡问题。标准规定单叶片零度桨距角偏差小于±0.3°为正常,当其超过标准规定值后,对风机载荷、振动、发电量会产生较大影响。
2、由于气动不平衡问题存在的普遍性和3-5年周期内发生反复性,且对发电量和机组运行稳定、疲劳寿命都存在明显的影响,因此已经受到了广泛的关注和重视。目前国内外针对叶片气动不平衡的主要检测方法有叶根目测校准、运行数据分析、高速相机图片对比。叶根目测校准主要通过目测对照轮毂0度标识和叶根零度标识进行确认和校准;当叶根0度标识不准确时,可能需要参考合模缝进行重新标识,不需要操作特定设备,但无法避免视觉误差、表面污染、叶片标尺偏差等因素的影响。运行数据分析主要通过分析运行数据风速和功率数据,振动数据,或叶根载荷数据,可粗略估算出偏差,无需登塔,无需专业设备,直接利用scada数据,但运行参数的影响因素较多,无法锁定原因;且无法量化准确的偏差值。高速相机图片对比主要通过高速摄像对比三个叶片通过时的状态,但无法避免风机振动的影响,且精度较低。
技术实现思路
1、本发明实施方式的目的是提供一种风电机组叶片角度检测方法及装置,该方法根据采集的风电机组叶片及塔筒的激光测距数据处理得到三支叶片的叶尖二维数组以及叶根二维数组,根据叶尖二维数组以及叶根二维数组形成叶尖初步轮廓曲线和叶根初步轮廓曲线,根据叶尖初步轮廓曲线和叶根初步轮廓曲线拟合得到叶根真实轮廓曲线、叶根标准曲线、叶尖真实轮廓曲线和叶尖标准曲线,根据轮廓曲线确定各支叶片的扭角,为叶片检修以及安装提供数据基础,通过叶片角度测量,对叶片最佳桨距角的位置进行精确校准,保证叶轮的气动平衡,减少风机振动,延长服役年限,提高机组发电效率。
2、为了实现上述目的,本发明第一方面提供一种风电机组叶片角度检测方法,所述方法包括:
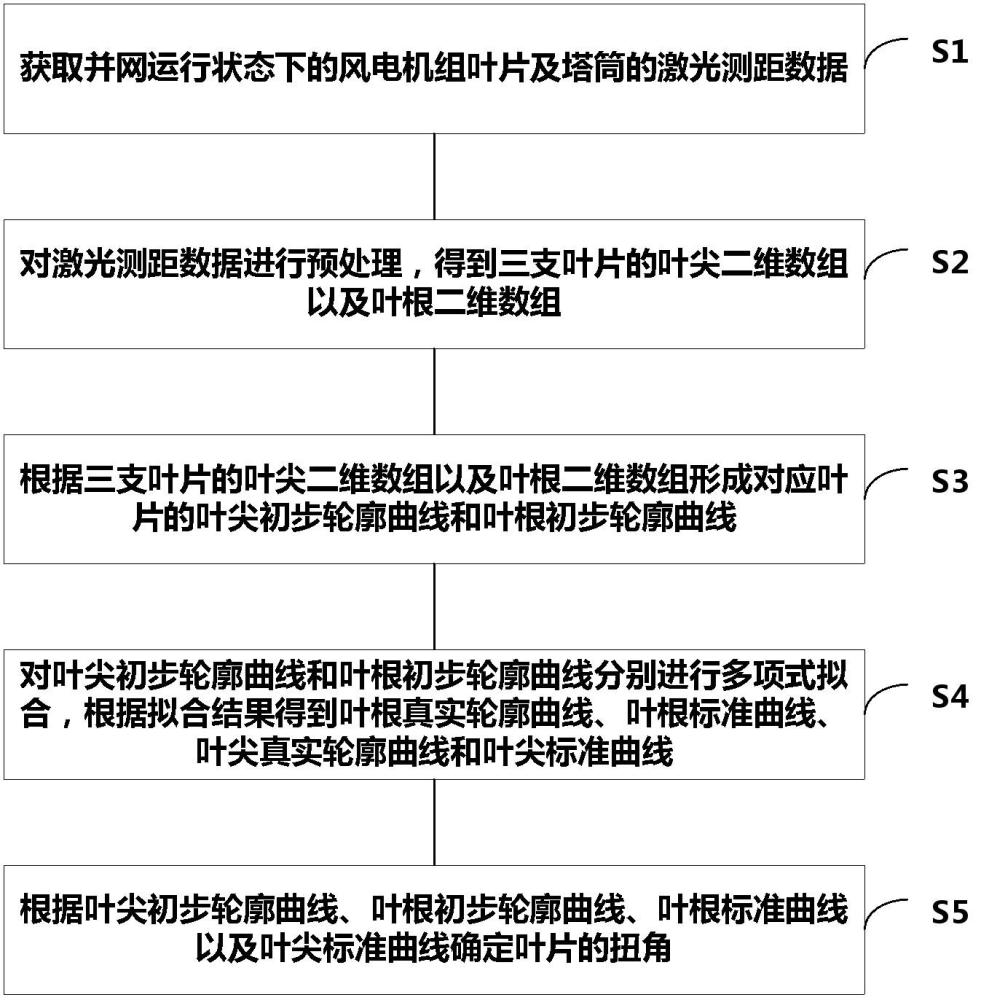
3、获取并网运行状态下的风电机组叶片及塔筒的激光测距数据;
4、对激光测距数据进行预处理,得到三支叶片的叶尖二维数组以及叶根二维数组;
5、根据三支叶片的叶尖二维数组以及叶根二维数组形成对应叶片的叶尖初步轮廓曲线和叶根初步轮廓曲线;
6、对叶尖初步轮廓曲线和叶根初步轮廓曲线分别进行多项式拟合,根据拟合结果得到叶根真实轮廓曲线、叶根标准曲线、叶尖真实轮廓曲线和叶尖标准曲线;
7、根据叶尖初步轮廓曲线、叶根初步轮廓曲线、叶根标准曲线以及叶尖标准曲线确定叶片的扭角。
8、根据上述技术手段,将根据采集的风电机组叶片及塔筒的激光测距数据处理得到三支叶片的叶尖二维数组以及叶根二维数组,根据叶尖二维数组以及叶根二维数组形成叶尖初步轮廓曲线和叶根初步轮廓曲线,根据叶尖初步轮廓曲线和叶根初步轮廓曲线拟合得到叶根真实轮廓曲线、叶根标准曲线、叶尖真实轮廓曲线和叶尖标准曲线,根据轮廓曲线确定各支叶片的扭角,为叶片检修以及安装提供数据基础,通过叶片角度测量,对叶片最佳桨距角的位置进行精确校准,保证叶轮的气动平衡,减少风机振动,延长服役年限,提高机组发电效率。
9、在本技术实施例中,所述激光测距数据是由激光测距装置瞄准风电机组塔筒中心线获取的数据,包括叶尖激光测距数据和叶根激光测距数据;
10、对激光测距数据进行预处理,得到三支叶片的叶尖二维数组以及叶根二维数组,包括:
11、对激光测距数据进行预处理,修正异常数据,补全缺失数据;
12、对预处理后的激光测距数据进行分割,得到按叶片数据和塔筒数据的区间边界进行分割的数集;
13、以六为位置公差,将按叶片数据和塔筒数据的区间边界进行分割的数集处理为六个数组,得到三支叶片的叶尖二维数组、叶尖塔筒二维数组、叶根二维数组和叶根塔筒二维数组。
14、根据上述技术手段,对激光测距数据进行预处理,修正异常数据,补全缺失数据,使数据更加完整准确,避免影响后续的分割结果;通过对数据进行分割,将叶尖数据与叶尖塔筒数据、叶根数据与叶根塔筒数据分割开来,为后续获取叶尖初步轮廓曲线和叶根初步轮廓曲线提供准确的数据。
15、在本技术实施例中,对激光测距数据进行分割,得到按叶片数据和塔筒数据的区间边界进行分割的数集,包括:
16、采用直方图函数从激光测距数据中筛选出叶片数据和塔筒数据的初步边界集合;
17、根据初步边界集合中元素的差值结合风机设计参数筛选确定叶片转到塔筒以及塔筒转到叶片时的边界值;
18、根据边界值将激光测距数据中位于任意两个边界值之间的数据存储为一个数集;
19、将每一个数集存储为按叶片数据和塔筒数据的区间边界进行分割的数集中的一个元素,得到按叶片数据和塔筒数据的区间边界进行分割的数集。
20、激光测距装置在采集并网运行状态下的风电机组叶片及塔筒的激光测距数据时,采集的激光测距数据呈现为循环的叶片ⅰ-塔筒-叶片ⅱ-塔筒-叶片ⅲ-塔筒,叶片旋转经过激光测距装置正对的位置时,激光测距装置所测得的数据由激光测距装置到叶片表面的第一距离变为激光测距装置到塔筒的第二距离,由于叶片与塔筒之间存在净空距离,因此,第一距离与第二距离之间存在较大的差值,基于此差值原理,从激光测距数据中确定出叶片转到塔筒以及塔筒转到叶片时的边界值,基于这些边界值可以从激光测距数据中将不同叶片以及不同叶片间塔筒的测距数据分为不同的数集。
21、在本技术实施例中,分别对激光测距数据进行异常处理,修正异常数据,补全缺失数据,包括:
22、根据风电机组设计参数设置激光测距数据对应的上限值和下限值;
23、将激光测距数据中超出上限值和下限值的数据替换为第一预设数值;
24、若相邻两个第一预设数值之间的数据量小于预设数量,则将前一个第一预设数值替换为下限值,若相邻两个第一预设数值之间的数据量大于预设数量,则将前一个第一预设数值替换为相邻的激光测距数据的数值,得到异常修正后的四组激光测距数据;
25、采用概率估计法补全激光测距数据中的缺失数据。
26、根据上述技术手段,首先将超出上下限的异常数据用第一预设数值替换,然后再根据第一预设数值之间间隔的数据量对异常数据进行修正,能够直接根据异常数据的形态进行修正,而不是直接删除数据,减少了补全数据过程中的计算量。
27、在本技术实施例中,根据三支叶片的叶尖二维数组以及叶根二维数组形成对应叶片的叶尖初步轮廓曲线和叶根初步轮廓曲线,包括:
28、根据激光测距数据的仰角将三支叶片的叶尖二维数组以及叶根二维数组中的数据转换为水平投影数据;
29、记录每个数组中每行数据的个数;
30、根据每行数据的个数计算对应数组的第一公差:第一公差=最大弦长/(个数-1);
31、根据第一公差构建对应数组的等差数列,所述等差数列的首元素为0,公差为第一公差,等差数列的最大值为最大弦长;
32、将对应数组的水平投影数据均匀分布在以对应数组的等差数列作为横坐标的坐标系中;
33、采用插值法填补横坐标上的空缺数据,得到对应数组的重构二维数组;
34、对重构二维数组中的每一列的数据采用正态分布的概率密度函数求取数学期望获得理想值;
35、根据理想值形成对应数组的初步轮廓曲线。
36、在本技术实施例中,对叶尖初步轮廓曲线和叶根初步轮廓曲线分别进行多项式拟合,根据拟合结果得到叶根真实轮廓曲线、叶根标准曲线、叶尖真实轮廓曲线和叶尖标准曲线,包括:
37、对叶尖初步轮廓曲线和叶根初步轮廓曲线分别进行多项式拟合,得到拟合后的叶尖拟合轮廓曲线和叶根拟合轮廓曲线;
38、分别对三支叶片的叶尖拟合轮廓曲线取横坐标中线,使得三支叶片的叶尖拟合轮廓曲线重合,得到叶尖真实轮廓曲线;
39、分别对三支叶片的叶尖拟合轮廓曲线求取平均值,得到叶尖标准曲线;
40、同理根据三支叶片的叶根拟合轮廓曲线得到叶根真实轮廓曲线和叶根标准曲线。
41、根据上述技术手段,根据叶尖初步轮廓曲线和叶根初步轮廓曲线拟合得到叶尖拟合轮廓曲线和叶根拟合轮廓曲线,再根据叶尖拟合轮廓曲线和叶根拟合轮廓曲线得到叶根真实轮廓曲线、叶根标准曲线、叶尖真实轮廓曲线和叶尖标准曲线。
42、在本技术实施例中,根据叶尖初步轮廓曲线、叶根初步轮廓曲线、叶根标准曲线以及叶尖标准曲线确定叶片的扭角,包括:
43、将三支叶片的叶尖初步轮廓曲线与叶尖标准曲线绘制在同一坐标系中,获取三支叶片的叶尖初步轮廓曲线与叶尖标准曲线的重合点;
44、以重合点为交点,分别作三支叶片的叶尖初步轮廓曲线以及叶尖标准曲线对应的切线;
45、分别获取三支叶片对应的切线与叶尖标准曲线对应的切线的夹角,作为对应叶片的叶尖不平衡角;
46、同理,根据三支叶片的叶根初步轮廓曲线以及叶根标准曲线获取对应叶片的叶根不平衡角;
47、利用同支叶片的叶根不平衡角减去叶尖不平衡角,得到对应叶片的扭角。
48、根据上述技术手段,根据三支叶片的叶尖初步轮廓曲线和叶尖标准曲线确定对应叶片的叶尖不平衡角,根据三支叶片的叶根初步轮廓曲线以及叶根标准曲线确定对应叶片的叶根不平衡角,从而计算得到叶片的扭角。
49、在本技术实施例中,所述方法还包括:
50、根据三支叶片的叶根二维数组和叶根塔筒二维数组确定各支叶片叶根的数据长度以及叶片间间隔数据的长度;
51、根据各支叶片数据的长度以及各支叶片对应的叶片间间隔数据的长度计算各支叶片的齿间长度,齿间长度=叶片数据的长度+叶片间间隔数据的长度;
52、根据各支叶片的齿间长度计算各支叶片的齿间距:齿间距=齿间长度*360/一周数据长度-120,其中,一周数据长度为三支叶片的齿间长度之和;
53、根据各支叶片的齿间距判断三支叶片安装是否等齿距。
54、根据上述技术手段,可以根据处理后的三支叶片的叶根二维数组和叶根塔筒二维数组计算得到各支叶片的齿间距,从而判断三支叶片安装是否等齿距,为叶片安装提供修正的数据依据。
55、在本技术实施例中,所述方法还包括:
56、确定按叶片数据和塔筒数据的区间边界进行分割的数集中各元素的长度;
57、以六个元素为一组,将按叶片数据和塔筒数据的区间边界进行分割的数集中的元素划分为多个数组;
58、根据各元素的长度计算各个数组的数组长度;
59、根据数组长度以及激光测距数据的采样频率计算叶轮转速:叶轮转速=采样频率*60/数组长度;和/或
60、从三支叶片的叶尖二维数组中获取各个元素的最后一个数据,从三支叶片的叶尖塔筒二维数组中获取各个元素的第一个数据;
61、采用叶尖塔筒二维数组对应位置的元素的第一个数据减去对应叶片的叶尖二维数组对应位置的元素的最后一个数据,得到对应叶片的叶尖净空值;同理得到对应叶片的叶根净空值;和/或
62、根据叶尖塔筒二维数组或者叶根塔筒二维数组绘制得到塔筒振动曲线。
63、根据上述技术手段,可以根据按叶片数据和塔筒数据的区间边界进行分割的数集计算出叶轮转速集合以及叶片的净空值,根据叶尖塔筒二维数组或者叶根塔筒二维数组绘制得到塔筒振动曲线,从而为分析塔筒振动提供数据基础。
64、本技术第二方面提供一种风电机组叶片角度检测装置,所述装置包括:
65、激光测距装置,用于获取并网运行状态下的风电机组叶片及塔筒的激光测距数据;
66、处理器,与所述激光测距装置连接,用于接收激光测距数据,并对激光测距数据进行预处理,得到三支叶片的叶尖二维数组以及叶根二维数组;根据三支叶片的叶尖二维数组以及叶根二维数组形成对应叶片的叶尖初步轮廓曲线和叶根初步轮廓曲线;对叶尖初步轮廓曲线和叶根初步轮廓曲线分别进行多项式拟合,根据拟合结果得到叶根真实轮廓曲线、叶根标准曲线、叶尖真实轮廓曲线和叶尖标准曲线;根据叶尖初步轮廓曲线、叶根初步轮廓曲线、叶根标准曲线以及叶尖标准曲线确定叶片的扭角。
67、该装置无需在风电机组上安装设备,整个测量过程不需要风机停机,即可精准可靠地完成校准、测试工作,处理对激光测距装置采集的数据进行分析,即可直观、精确的测试出叶轮的气动平衡特性。
68、通过上述技术方案,使用激光测距装置对风电机组三支叶片角度偏差进行检测,整个测量过程不需要风机停机,对对需要校准叶片桨距角度的机组,也可以精准可靠地完成校准、测试工作。通过对塔筒振动等状态的分析,可以更加直观的反馈出传动链的振动情况,可以在机组不安装任何传感器的情况下,直观、精确的测试出叶轮的气动平衡特性。
69、本发明实施方式的其它特征和优点将在随后的具体实施方式部分予以详细说明。
本文地址:https://www.jishuxx.com/zhuanli/20240726/125288.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表