一种焦炉机车控制方法、装置、电子设备及存储介质与流程
- 国知局
- 2024-07-29 10:10:34
本发明涉及冶炼,具体而言,涉及一种焦炉机车控制方法、装置、电子设备及存储介质。
背景技术:
1、焦炉机车是焦化生产中的重要设备,包括推焦车、拦焦车以及熄焦车等,在焦化生产中它们协同工作,以完成焦炭的生产和运输。为了节省人力资源以及简化操作难度,焦炉机车的智能驾驶技术是近年来焦化工业发展的重点之一。
2、然而,经发明人研究发现,现有的焦炉机车智能驾驶技术在控制焦炉机车自动走行方面,大多存在定位精确度低的问题。
技术实现思路
1、本发明的目的包括,例如,提供了一种焦炉机车控制方法、装置、电子设备及存储介质,其能够至少部分解决上述技术问题。
2、本发明的实施例可以这样实现:
3、第一方面,本发明实施例提供了一种焦炉机车控制方法,应用于控制器,所述控制器用于控制焦炉机车运行,所述焦炉机车上设置有编码器,所述控制器与所述编码器通信连接;所述方法包括:
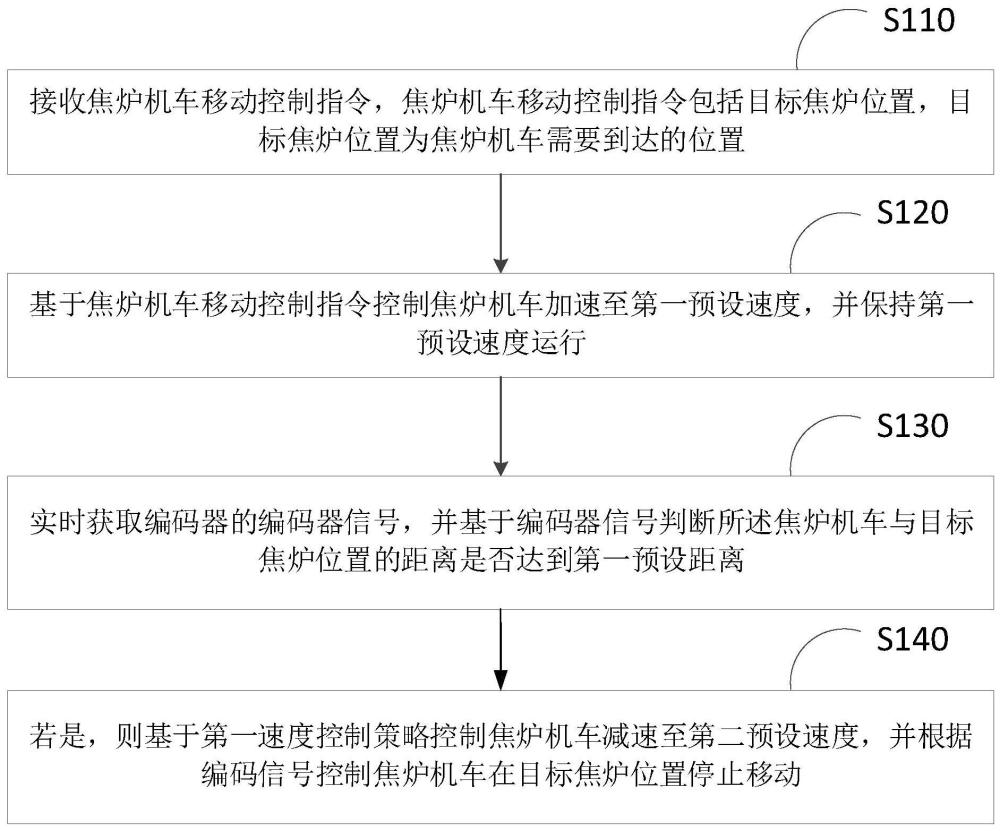
4、接收焦炉机车移动控制指令,所述焦炉机车移动控制指令包括目标焦炉位置,所述目标焦炉位置为所述焦炉机车需要到达的位置;
5、基于所述焦炉机车移动控制指令控制所述焦炉机车加速至第一预设速度,并保持所述第一预设速度运行;
6、实时获取所述编码器的编码器信号,并基于所述编码器信号判断所述焦炉机车与所述目标焦炉位置的距离是否达到第一预设距离;
7、若是,则基于第一速度控制策略控制所述焦炉机车减速至第二预设速度,并根据所述编码信号控制所述焦炉机车在所述目标焦炉位置停止移动。
8、可选地,所述焦炉机车上还设置有用于识别焦炉码牌的码牌识别器,每个所述焦炉码牌上记录有对应的焦炉位置信息;所述方法还包括:
9、在所述焦炉机车移动过程中,基于所述码牌识别器识别除所述目标焦炉位置对应的焦炉码牌之外、各所述焦炉码牌上记录的焦炉位置信息;
10、获取识别所述焦炉位置信息时的所述编码器信号;
11、判断所述焦炉位置信息与所述编码器信号的误差是否大于预设误差阈值;
12、若是,则基于所述焦炉位置信息对所述编码器进行校正。
13、可选地,所述方法还包括:
14、基于预设焦炉位置信息规则检验识别到的所述焦炉位置信息;
15、监测每一次获取所述焦炉位置信息后所述焦炉机车移动的距离;
16、若识别到的焦炉位置信息不满足预设焦炉位置信息规则,和/或检测到所述焦炉机车的位置相对于获取所述焦炉位置信息时的位置移动了第二预设距离,则丢弃获取到的所述焦炉位置信息。
17、可选地,所述码牌识别器包括第一传感器组以及第二传感器组,所述焦炉位置信息通过穿孔编码的形式记录在所述焦炉码牌上;所述基于所述码牌识别器识别各所述焦炉码牌上记录的焦炉位置信息,包括:
18、分别通过所述第一传感器组以及所述第二传感器组获取所述焦炉码牌上的穿孔编码;
19、根据所述第一传感器组与所述第二传感器组获取所述穿孔编码的时间顺序,确定所述焦炉机车的运行方向;
20、判断所述运行方向是否为所述穿孔编码的编码方向;
21、若是,则将所述穿孔编码转换为所述焦炉位置信息;若否,则倒置所述穿孔编码,将倒置后的所述穿孔编码转换为所述焦炉位置信息。
22、可选地,所述基于第一速度控制策略控制所述焦炉机车减速至第二预设速度,包括:
23、基于第一速度控制公式,确定变频器的频率设定值;
24、根据所述频率设定值调整所述焦炉机车的速度由所述第一预设速度减为所述第二预设速度;
25、所述第一速度控制公式为:
26、
27、其中,f为所述频率设定值,s为所述焦炉机车到所述目标焦炉位置的距离,s0为所述第一预设距离,fmax为所述焦炉机车以所述第一预设速度运行时所述变频器的频率值。
28、可选地,所述根据所述编码器信号控制所述焦炉机车在所述目标焦炉位置停止移动,包括:
29、转换所述编码器信号为所述焦炉机车所在的机车位置;
30、判断所述机车位置是否为所述目标焦炉位置;
31、若是,则控制所述焦炉机车停止移动。
32、可选地,所述方法还包括:
33、基于所述码牌识别器对位于所述目标焦炉位置的焦炉码牌进行识别,获得所述目标焦炉位置对应的焦炉码牌上的穿孔编码;
34、转换所述穿孔编码为所述焦炉位置信息;
35、对所述焦炉位置信息进行奇校验/偶校验;
36、若所述焦炉位置信息通过所述奇校验/偶校验,且所述机车位置为所述目标焦炉位置,则控制所述焦炉机车停止移动。
37、第二方面,本发明实施例提供了一种焦炉机车控制装置,应用于控制器,所述控制器用于控制焦炉机车运行,所述焦炉机车上设置有编码器,所述控制器与所述编码器通信连接;所述焦炉机车控制装置包括:
38、指令接收单元,用于接收焦炉机车移动控制指令,所述焦炉机车移动控制指令包括目标焦炉位置,所述目标焦炉位置为所述焦炉机车需要到达的位置;
39、第一速度控制单元,用于基于所述焦炉机车移动控制指令控制所述焦炉机车加速至第一预设速度,并保持所述第一预设速度运行;
40、第一预设距离判断单元,用于实时获取所述编码器的编码器信号,并基于所述编码器信号判断所述焦炉机车与所述目标焦炉位置的距离是否达到第一预设距离;
41、第二速度控制单元,用于在所述焦炉机车与所述目标焦炉位置的距离达到第一预设距离时,基于第一速度控制策略控制所述焦炉机车减速至第二预设速度,并根据所述编码信号控制所述焦炉机车在所述目标焦炉位置停止移动。
42、第三方面,本发明实施例提供了一种电子设备,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述任一项所述方法的步骤。
43、第四方面,本发明实施例提供了一种计算机可读存储介质,所述计算机可读存储介质包括计算机程序,所述计算机程序运行时控制所述计算机可读存储介质所在服务器实现上述任一项所述方法的步骤。
44、本发明实施例的有益效果包括,例如:
45、通过获取编码器的编码信号,实时确定焦炉机车的实际位置。并在焦炉机车与目标焦炉位置的距离达到第一预设距离时,基于第一速度控制策略控制控制所述焦炉机车减速至第二预设速度,以及根据编码信号控制焦炉机车在目标焦炉位置停止移动。使得控制器能够实时定位到焦炉机车的位置,并能够通过对焦炉机车速度的控制,使得焦炉机车精确地停到目标焦炉位置,具有精度高、定位准确的优点。
技术特征:1.一种焦炉机车控制方法,其特征在于,应用于控制器,所述控制器用于控制焦炉机车运行,所述焦炉机车上设置有编码器,所述控制器与所述编码器通信连接;所述方法包括:
2.如权利要求1所述的焦炉机车控制方法,其特征在于,所述焦炉机车上还设置有用于识别焦炉码牌的码牌识别器,每个所述焦炉码牌上记录有对应的焦炉位置信息;所述方法还包括:
3.如权利要求2所述的焦炉机车控制方法,其特征在于,所述方法还包括:
4.如权利要求2所述的焦炉机车控制方法,其特征在于,所述码牌识别器包括第一传感器组以及第二传感器组,所述焦炉位置信息通过穿孔编码的形式记录在所述焦炉码牌上;所述基于所述码牌识别器识别各所述焦炉码牌上记录的焦炉位置信息,包括:
5.如权利要求1所述的焦炉机车控制方法,其特征在于,所述基于第一速度控制策略控制所述焦炉机车减速至第二预设速度,包括:
6.如权利要求4所述的焦炉机车控制方法,其特征在于,所述根据所述编码器信号控制所述焦炉机车在所述目标焦炉位置停止移动,包括:
7.如权利要求6所述的焦炉机车控制方法,其特征在于,所述方法还包括:
8.一种焦炉机车控制装置,其特征在于,应用于控制器,所述控制器用于控制焦炉机车运行,所述焦炉机车上设置有编码器,所述控制器与所述编码器通信连接;所述焦炉机车控制装置包括:
9.一种电子设备,其特征在于,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现权利要求1~7任一项所述方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质包括计算机程序,所述计算机程序运行时控制所述计算机可读存储介质所在服务器实现权利要求1~7任一项所述方法的步骤。
技术总结本发明的实施例提供了一种焦炉机车控制方法、装置、电子设备及存储介质,涉及冶炼技术领域。该方法通过获取编码器的编码信号,实时确定焦炉机车的实际位置。并在焦炉机车与目标焦炉位置的距离达到第一预设距离时,基于第一速度控制策略控制控制所述焦炉机车减速至第二预设速度,以及根据编码信号控制焦炉机车在目标焦炉位置停止移动。使得控制器能够实时定位到焦炉机车的位置,并能够通过对焦炉机车速度的控制,使得焦炉机车精确地停到目标焦炉位置,具有精度高、定位准确等优点。技术研发人员:钟忆帆,吴盛虎,朱柏伟,付绍文,黄欣阳,肖光钰,吴敏君,万澄,周涛,袁佩寒,龚达欣,徐川受保护的技术使用者:新余钢铁股份有限公司技术研发日:技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240726/130933.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表