一种基于城市环境下的无人机集群航迹规划方法与流程
- 国知局
- 2024-07-30 09:19:38
本发明属于无人机,特别涉及一种基于城市环境下的无人机集群航迹规划方法。
背景技术:
1、随着无人机集群展现出巨大效能和应用潜力,无人机被广泛应用于各个领域,其中城市环境下无人机集群应用最具有前景。随着战争形态的不断演变、人工智能技术不断提高,现代化战场呈现出智能化、无人化等特点,受自然界中“生物集群”的启发,结合无人机低成本、大规模、高抗毁性、高机动性等诸多特点,无人机往往以集群的方式在作战中进行侦察监视、火力打击、通信中继、信息对抗等任务,其表现出来的整体效能最大,应用也较为广泛。针对城市环境中存在的装备发挥受限、环境异常复杂、航迹规划难度大等问题,结合无人机集群隐身性好、机动性强、攻击火力足等优势,如何构建低成本、小代价、高效能的无人机集群城市航迹规划机理是十分迫切和必要的。
技术实现思路
1、本发明针对上述现有技术的不足,发明了一种基于城市环境下的无人机集群航迹规划方法。
2、为了实现上述目的,本发明采用如下的技术方案:
3、一种基于城市环境下的无人机集群航迹规划方法,包括如下步骤:
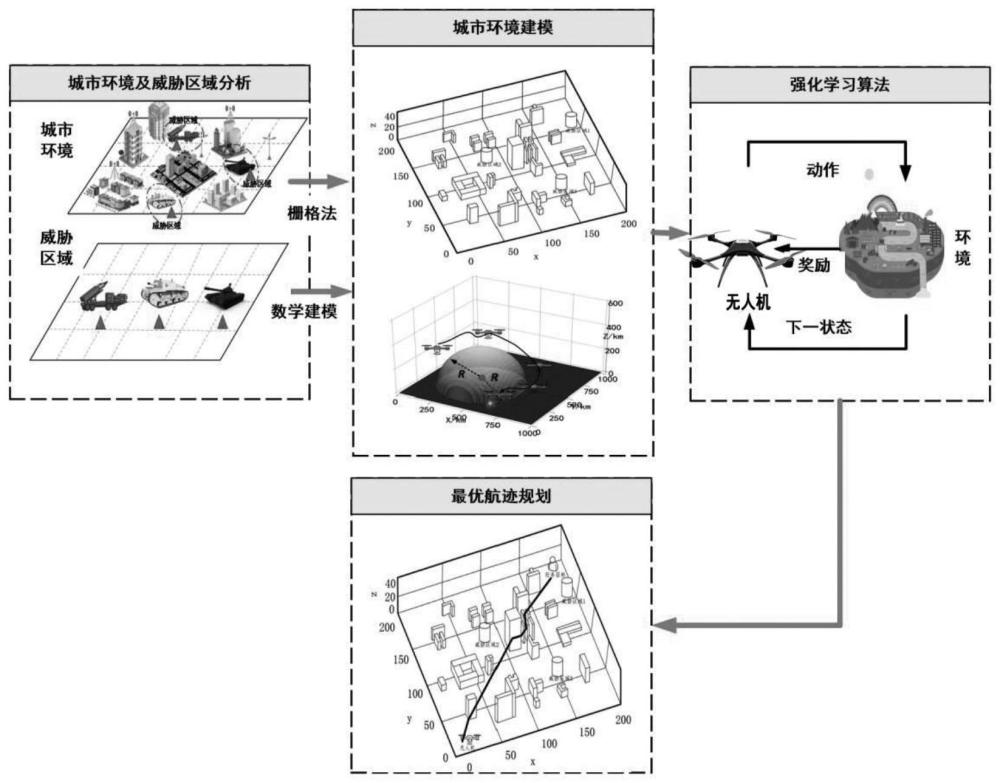
4、步骤1:无人机采用栅格法对城市环境进行三维建模,刻画出城市环境的复杂性;
5、步骤2:根据预先设定的任务目标和预先侦查到的武器威胁中心在三维建模中标记构建城市环境模型;
6、步骤3:无人机集群航行过程中各自采用数学建模计算第m个无人机与第i个武器威胁中心的距离,并分析在城市环境下武器火力攻击对无人机的杀伤性能;
7、所述第m个无人机到第i个武器威胁中心的直线距离为:
8、
9、所述武器威胁的数学模型表示为:
10、
11、其中,为比较判断后的武器威胁效用,表示第m个无人机在第i个武器威胁中心区内的威胁效用值,ri为武器威胁半径,(xm,ym,zm)为第m个无人机的实时坐标,为第i个武器威胁中心的坐标;
12、步骤4:无人机利用强化学习算法实时计算第m个无人机在城市环境与武器威胁的条件下的到达任务目标的最优航迹;
13、步骤5:无人机根据计算得出的最优航迹选择各自的任务目标攻击,并根据城市环境模型中实时更新的环境信息更新最优航迹。
14、本发明的技术方案无人机集群在态势感知、协同作战技术的支撑下查明敌情部署、了解动向、预判部署,对打击目标进行精准分析,避开敌方火力探知范围、建筑物障碍等,寻出最优打击路径,对任务目标实施精准、高效打击,完成战术目的。
15、进一步,所述栅格法为根据比例和分割要求,将城市环境进行分割,划分成若干相同的栅格,并对每个栅格设置环境参数,根据实际或假设环境,设置其中各个栅格障碍物,把算法需要处理的约束条件与物理环境中的障碍物等进行一一映射,以此为无人机的航行提供城市环境模型。
16、进一步,所述武器威胁包括防空火炮威胁、坦克威胁、电磁炮威胁、移动堡垒威胁或/和导弹威胁,对无人机造成伤害的都属于武器威胁。
17、进一步,步骤5中的环境信息为新出现的障碍物或/和新出现的武器威胁中心。
18、进一步,所述强化学习计算方法为:
19、s1:无人机对所构建的城市环境模型进行探索,获取无人机观察状态;
20、s2:根据当前所获取的环境信息进行判断,选择概率高的动作并执行;
21、s3:执行动作根据城市环境的改变而进入下一个管擦状态,每执行一个动作会得到相应的回报奖励;
22、s4:将当前状态、当前执行的动作、下一个观察状态、回报奖励作为一个信息存储在经验池中,当经验池的信息条较多时,采用随机采样的方式从系统经验池中抽取信息条对神经网络进行训练,优化神经网络参数,直到下一个状态为设定的终止状态且所迭代训练的次数也达到阈值,否则,重置无人机的状态反复训练,最终得到无人机最优航迹路线。
23、进一步,若无人机当前执行的动作被认定为是错误动作时系统经验池会给予此错误动作负奖励;若动作认定为是正确动作时系统经验池会给予此正确动作正奖励,获得正奖励最高的航迹为最优航迹。
24、进一步,所述观察状态受无人机滚动角、俯仰角和航偏角的约束,这样更贴合无人机的实际飞行状态。
25、本发明的优点在于:本发明的城市环境航迹规划首先通过栅格法对城市环境进行三维建模,刻画出城市环境的复杂性,同时利用数学建模将敌方武器威胁通过数学表达式的方式精确表达出来,刻画出威胁区域的范围,然后利用强化学习算法不断对所构建的环境进行探索,获取观测值,通过累计奖励最大化来自动寻优,最终寻找一条最优轨迹避开城市高大建筑物以及敌方火力攻击范围,对任务目标进行精准打击,保证我方最小代价下实现作战目的。
技术特征:1.一种基于城市环境下的无人机集群航迹规划方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于城市环境下的无人机集群航迹规划方法,其特征在于,所述栅格法为根据比例和分割要求,将城市环境进行分割,划分成若干相同的栅格,并对每个栅格设置环境参数,根据实际或假设环境,设置其中各个栅格障碍物。
3.根据权利要求1所述的一种基于城市环境下的无人机集群航迹规划方法,其特征在于,所述武器威胁包括防空火炮威胁、坦克威胁、电磁炮威胁、移动堡垒威胁或/和导弹威胁。
4.根据权利要求1所述的一种基于城市环境下的无人机集群航迹规划方法,其特征在于,步骤5中的环境信息为新出现的障碍物或/和新出现的武器威胁中心。
5.根据权利要求1所述的一种基于城市环境下的无人机集群航迹规划方法,其特征在于,所述强化学习计算方法为:
6.根据权利要求5所述的一种基于城市环境下的无人机集群航迹规划方法,其特征在于,若无人机当前执行的动作被认定为是错误动作时系统经验池会给予此错误动作负奖励。
7.根据权利要求5所述的一种基于城市环境下的无人机集群航迹规划方法,其特征在于,所述观察状态受无人机滚动角、俯仰角和航偏角的约束。
技术总结本发明公开了一种基于城市环境下的无人机集群航迹规划方法,包括通过栅格法对城市环境进行三维建模、在三维建模内利用数学建模将敌防守方的武器威胁通过数学表达式的方式精确表达出来、利用强化学习算法不断对所构建的环境进行探索,最终寻找一条最优轨迹避开城市高大建筑物以及敌防守火力攻击范围,对任务目标进行精准打击。本发明的技术方案无人机集群在态势感知、协同作战技术的支撑下查明敌情部署、了解动向、预判部署,对打击目标进行精准分析,避开敌方火力探知范围、建筑物障碍等,寻出最优打击路径,对任务目标实施精准、高效打击,完成战术目的。技术研发人员:费陈,贺拥亮,赵亮,徐嵩,李银城受保护的技术使用者:中国人民武装警察部队士官学校技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240730/149071.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。