一种基于鲁棒控制理论的半主动隔振系统控制器设计方法
- 国知局
- 2024-07-30 09:20:40
本发明涉及隔振系统,特别是涉及一种基于鲁棒控制理论的半主动隔振系统控制器设计方法。
背景技术:
1、在半导体制造业中,运动控制之前通常需要采用扫频得到被控对象的动态模型。然而,现有的隔振器在频率扫描过程中不能很好地隔离平台基座上频率在0hz和固有频率之间的惯性力扰动。本发明提出了一种基于鲁棒控制理论的半主动隔振系统控制器。该系统具有显著的反共振特性,即振动在特定频率下,振幅可以下降到几乎为零,该频率称为反共振频率。本发明所提出的控制器旨在增加一个可调的反共振频率来充分利用半主动隔振系统独特的反共振特性,有效改隔振系统的隔振性能。所以本发明设计了一种基于鲁棒控制理论的半主动隔振系统控制器设计方法。
技术实现思路
1、本发明目的是为了解决现有技术中的问题,提供了一种基于鲁棒控制理论的半主动隔振系统控制器设计方法。
2、本发明是通过以下技术方案实现的,本发明提出一种基于鲁棒控制理论的半主动隔振系统控制器设计方法,所述方法包括以下步骤:
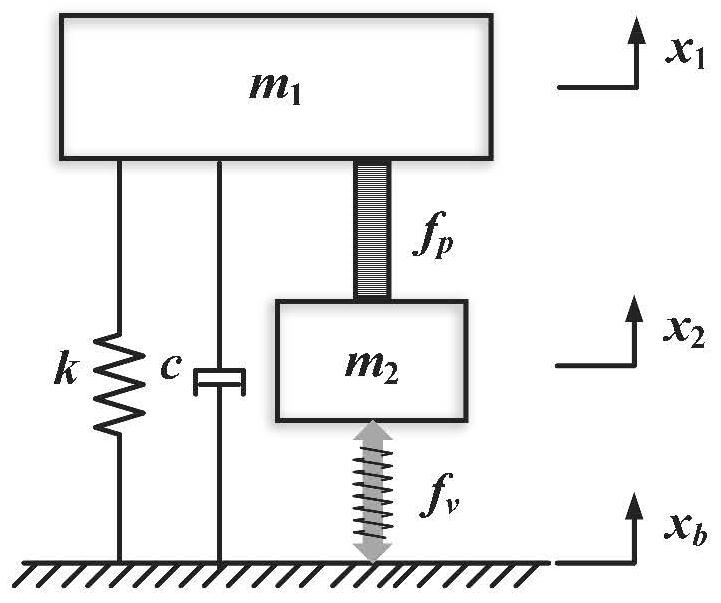
3、步骤一、建立半主动隔振系统的动力学模型;
4、步骤二、推导出半主动隔振系统的动力学表达式;
5、步骤三、根据动力学表达式对半主动隔振系统进行特性分析;
6、步骤四、找到半主动隔振系统的共振频率与反共振频率;
7、步骤五、根据半主动隔振系统的共振频率并基于鲁棒控制理论设计半主动隔振系统的控制器,达到更好的主动控制效果。
8、进一步地,在步骤一中,根据法拉第定律,音圈电机的输出力为:
9、fv=nbπdi=kii
10、式中,n为线圈匝数,b为气隙平均磁感应强度,d为线圈直径,i为线圈电流值,ki=nbπd,为音圈电机的推力系数;
11、压电陶瓷驱动器的工作电压、纵向位移和输出力可以推导为:
12、fp=-aσ=kuu-kpδ,
13、式中,ku=aepd33/h,为pzt的力系数,kp=aep/(nh),为pzt的刚度;h为叠层执行器的单层厚度,n为叠层陶瓷层的数量,a为压电陶瓷片的面积;
14、由于压电陶瓷的刚度过大,采用pzt与弹簧串联的方法来降低其刚度;压电陶瓷驱动器的刚度可以改写为:
15、kp=(aepkl/(nh))/(aep/(nh)+kl)
16、进一步地,在步骤二中,半主动隔振系统的运动方程为:
17、
18、半主动隔振系统的运动方程可改写为,
19、
20、进一步地,在步骤三中,假设系统的初始条件为零,让控制输入变为零,即i=0和u=0;那么步骤二中的运动方程可以写成:
21、
22、用xb到x1的传递函数来评价隔振性能,无控制器系统的传递函数可以写成:
23、
24、进一步地,在步骤四中,根据步骤三中得到的传递函数可以得到半主动隔振系统的共振频率ω1、ω2与反共振频率ω3;其中:
25、进一步地,在步骤五中,将期望值xr和负载位移的实际值x1的差值用作控制器的输入,输出为音圈电机线圈的电流值i和pzt的电压值u;通过fft获得基座振动的主频f,作为确定新增值的反共振频率ω4;通过输入i和u,驱动器产生音圈电机驱动力fv和pzt驱动力fp,作用于负载;基于以上,形成了一个闭环控制来隔离基座振动;
26、控制器的设计包含从x1到i和从x1到u的两个传递函数,即h1和h2,设计如下:
27、
28、
29、式中:k、τ,ω4是所设计控制器的可调参数,ω4为附加反共振频率。
30、本发明的有益效果为:
31、1、本发明所述方法比较系统全面地介绍了半主动隔振系统控制器设计方法,建立了半主动隔振系统表达式,分析了半主动隔振系统的系统特性,根据系统的共振频率和反共振频率设计了控制器,达到了良好的隔振效果。
32、2、本发明设计的控制器不仅抑制了在两个共振频率和附近的振动,还增加一个新的反共振频率,该频率可以通过跟踪外部扰动实时调整,从而改善半主动隔振系统的控制性能。
技术特征:1.一种基于鲁棒控制理论的半主动隔振系统控制器设计方法,其特征在于:所述方法包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,在步骤一中,根据法拉第定律,音圈电机的输出力为:
3.根据权利要求2所述的方法,其特征在于,在步骤二中,半主动隔振系统的运动方程为:
4.根据权利要求3所述的方法,其特征在于,在步骤三中,假设系统的初始条件为零,让控制输入变为零,即i=0和u=0;那么步骤二中的运动方程可以写成:
5.根据权利要求4所述的方法,其特征在于,在步骤四中,根据步骤三中得到的传递函数可以得到半主动隔振系统的共振频率ω1、ω2与反共振频率ω3;其中:
6.根据权利要求5所述的方法,其特征在于,在步骤五中,将期望值xr和负载位移的实际值x1的差值用作控制器的输入,输出为音圈电机线圈的电流值i和pzt的电压值u;通过fft获得基座振动的主频f,作为确定新增值的反共振频率ω4;通过输入i和u,驱动器产生音圈电机驱动力fv和pzt驱动力fp,作用于负载;基于以上,形成了一个闭环控制来隔离基座振动;
技术总结本发明提出一种基于鲁棒控制理论的半主动隔振系统控制器设计方法。所述方法包括以下步骤:建立半主动隔振系统的动力学模型;推导出隔振系统的动力学表达式;根据动力学表达式对半主动隔振系统进行特性分析,找到半主动隔振系统的共振频率与反共振频率;根据系统的共振频率并基于鲁棒控制理论设计隔振系统的控制器。本发明设计的控制器一方面方法抑制在两个共振频率和附近的振动,另一方面增加一个新的反共振频率,该频率可以通过跟踪外部扰动实时调整,从而改善半主动隔振系统的控制性能,该方法低成本,简单易用,有效提升半主动隔振系统的隔振性能。技术研发人员:于程隆,李天一,李斌,于旭阳,赵勃受保护的技术使用者:哈尔滨工业大学技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240730/149109.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表