一种尾座式垂直起降无人机垂直模式姿态控制方法与流程
- 国知局
- 2024-07-30 09:23:14
本发明涉及飞行控制律设计技术,具体涉及一种尾座式垂直起降无人机垂直模式姿态控制方法。
背景技术:
1、垂直起降飞行器利用发动机提供的垂直向上的推力以克服重力,从而实现垂直起降。此类飞行器能够摆脱对机场跑道的依赖,具有出航灵活、出勤率高、保障成本低等优点;另外,还能在舰船上进行起降,在提高两栖作战能力方面,具有滑跑起降舰载机无法比拟的优势。垂直起降飞行器发展至今,主要类型有:尾座式、倾转旋翼式、旋翼类、喷气发动机推力转向式、涵道风扇类,以及这些方式的混合式。
2、其中,尾座式垂直起降无人机是一种起降过程中机体整体倾转的飞行器,可采用螺旋桨、涵道推进器、涡喷发动机等作为动力,凭借其质量轻、尺寸小、动力系统简单等特点,能够在船舶甲板、山地、峡谷、巷子等狭小空间进行起降,携带有效载荷后可用于执行侦察、中继通信、攻击等任务,具有广泛应用前景。
3、现有一中国专利,专利号为202210936545.8,申请日为2022.08.05,名称为《一种基于动态滤波微分的无人机俯仰角控制方法》的发明专利,其技术方案为:其通过测量无人机俯仰角、俯仰角速率、垂直加速度信号来组成控制方案稳定控制无人机俯仰姿态角;通过俯仰角速率与垂直加速度,将俯仰角误差与俯仰角速率误差分别分成大中小误差三种情况,分别求解其微分信号;同时通过俯仰角误差与俯仰角速率误差信号自适应生成滤波微分的时间参数,从而调节滤波微分算法的求解时间间隔,使得整个滤波微分信号具有良好的物理意义与精度。按照俯仰角与俯仰角速率将整个控制分为内外层,按照角速度与加速度分类分别求解内外回路相关干扰估计信号,并叠加良好的动态滤波微分信号。
4、上述专利虽然能实现无人机俯仰的控制方法,但需要安装速率陀螺仪的测量计算方法过于复杂,且并未解决无人机本身油门和内部扰动影响问题。
技术实现思路
1、本发明的目的在于提供能解决尾座式垂直起降无人机的静不稳定、姿态控制与油门控制存在强耦合和内部扰动影响的一种尾座式垂直起降无人机垂直模式姿态控制方法。
2、本发明的目的,通过以下技术方案实现:
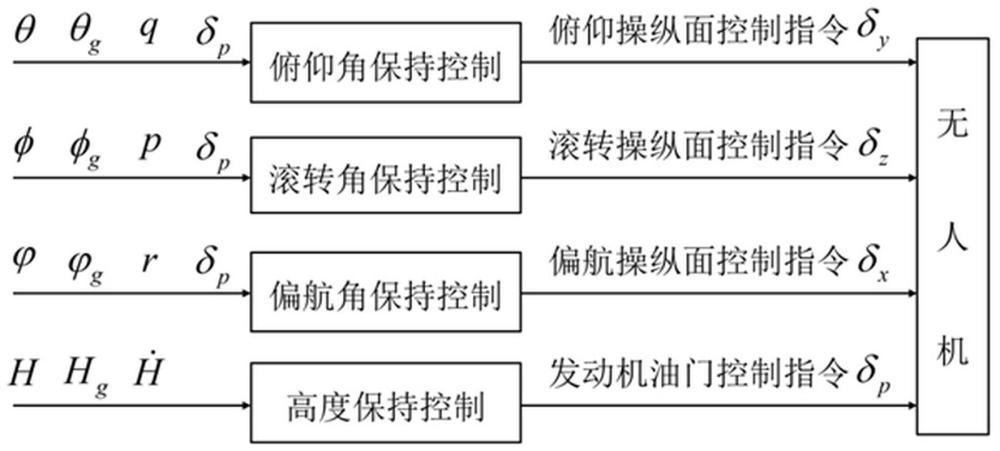
3、一种尾座式垂直起降无人机垂直模式姿态控制方法,通过利用俯仰角、滚转角、偏航角、俯仰角速度、滚转角速度、偏航角速度和高度作为控制量,对尾座式垂直起降无人机在垂直模式下的姿态控制,包括以下步骤:
4、步骤a:通过俯仰操纵进行俯仰角保持控制;
5、步骤b:通过滚转操纵进行滚转角保持控制;
6、步骤c:通过偏航操纵进行偏航角保持控制;
7、步骤d:通过发动机油门进行高度保持控制。
8、进一步的,所述步骤a中,俯仰操纵控制指令包括俯仰角目标跟踪控制、俯仰增稳控制和俯仰抗扰控制。
9、更进一步的,所述俯仰角目标跟踪控制采用俯仰角误差的比例控制加积分控制结构,并引入俯仰角目标微分控制项,具体的控制器结构为:
10、
11、式中,为俯仰角目标跟踪控制比例控制参数,为俯仰角目标跟踪控制积分控制参数,为俯仰角目标跟踪控制微分控制参数,θ为俯仰角,θg为俯仰角目标,为俯仰角目标微分,为俯仰角目标跟踪控制的控制指令。
12、更进一步的,所述俯仰增稳控制利用俯仰角速度设计阻尼器,利用俯仰角设计增稳控制器,具体的控制器结构为:
13、
14、式中,为俯仰角速度增稳控制参数,为俯仰角增稳控制参数,q为俯仰角速度,为俯仰增稳控制的控制指令。
15、更进一步的,所述俯仰抗扰控制利用发动机油门控制指令作为控制量,具体的控制器结构为:
16、
17、式中,为俯仰抗扰控制参数,δp为发动机油门控制指令,为俯仰抗扰控制的控制指令。
18、更进一步的,俯仰操纵控制指令包括俯仰角目标跟踪控制的控制指令、俯仰增稳控制的控制指令、俯仰抗扰控制的控制指令,具体为:
19、
20、式中,为发动机油门对俯仰操纵的滑流影响因子,δy为俯仰操纵控制指令。
21、进一步的,所述步骤b中,滚转操纵控制指令包括滚转角目标跟踪控制、滚转增稳控制和滚转抗扰控制。
22、更进一步的,滚转角目标跟踪控制采用滚转角误差的比例控制加积分控制结构,并引入滚转角目标微分控制项,具体的控制器结构为:
23、
24、式中,为滚转角目标跟踪控制比例控制参数,为滚转角目标跟踪控制积分控制参数,为滚转角目标跟踪控制微分控制参数,φ为滚转角,φg为滚转角目标,为滚转角目标微分,为滚转角目标跟踪控制的控制指令。
25、更进一步的,滚转增稳控制利用滚转角速度设计阻尼器,利用滚转角设计增稳控制器,具体的控制器结构为:
26、
27、式中,为滚转角速度增稳控制参数,为滚转角增稳控制参数,p为滚转角速度,为滚转增稳控制的控制指令。
28、更进一步的,滚转抗扰控制利用发动机油门控制指令作为控制量,具体的控制器结构为:
29、
30、式中,为滚转抗扰控制参数,δp为发动机油门控制指令,为滚转抗扰控制的控制指令。
31、更进一步的,滚转操纵控制指令包括滚转角目标跟踪控制的控制指令、滚转增稳控制的控制指令和滚转抗扰控制的控制指令,具体为:
32、
33、式中,为发动机油门对滚转操纵的滑流影响因子,δz为滚转操纵控制指令。
34、进一步的,所述步骤c中,偏航操纵控制指令包括偏航角目标跟踪控制、偏航增稳控制和偏航抗反扭控制。
35、更进一步的,偏航角目标跟踪控制采用偏航角误差的比例控制加积分控制结构,具体的控制器结构为:
36、
37、式中,为偏航角目标跟踪控制比例控制参数,为偏航角目标跟踪控制积分控制参数,为偏航角,为偏航角目标,为偏航角目标跟踪控制的控制指令。
38、更进一步的,偏航抗反扭控制利用发动机油门控制指令作为控制量,具体的控制器结构为:
39、
40、式中,为偏航抗反扭控制参数,δp为发动机油门控制指令,为偏航抗反扭控制的控制指令。
41、更进一步的,偏航操纵控制指令包括偏航角目标跟踪控制的控制指令、偏航增稳控制的控制指令、偏航抗反扭控制的控制指令,具体为:
42、
43、式中,为发动机油门对偏航操纵的滑流影响因子,δx为偏航操纵控制指令。
44、进一步的,所述步骤d中,发动机油门控制指令包括高度目标跟踪控制和高度增稳控制。
45、更进一步的,高度目标跟踪控制采用高度误差的比例控制加积分控制结构,具体的控制器结构为:
46、
47、式中,为高度目标跟踪控制比例控制参数,为高度目标跟踪控制积分控制参数,h为高度,hg为高度目标,为高度目标跟踪控制的控制指令。
48、更进一步的,高度增稳控制利用升降速率设计阻尼器,具体的控制器结构为:
49、
50、式中,为升降速率增稳控制参数,为升降速率,为高度增稳控制的控制指令。
51、更进一步的,发动机油门控制指令包括高度目标跟踪控制的控制指令和高度增稳控制的控制指令,具体为:
52、
53、式中,δp为发动机油门控制指令。
54、根据上述技术方案,本发明所具有的有益效果为:
55、1.本发明解决了尾座式垂直起降无人机的静不稳定、姿态控制与油门控制存在强耦合、内部扰动影响的问题,并在垂直模式姿态控制方法中包含了增稳控制、解耦控制、抗内扰控制,实现控制效果好。
56、2.本发明公开的尾座式垂直起降无人机垂直模式姿态控制方法采用pid控制结构,飞行控制律算法简单,易于设计人员掌握,机载飞控软件开发便利,工程应用价值高。
本文地址:https://www.jishuxx.com/zhuanli/20240730/149312.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。