一种故障自适应的固定翼无人机路径规划系统及方法
- 国知局
- 2024-07-30 09:23:20
本发明涉及固定翼无人机路径规划领域,具体涉及一种故障自适应的固定翼无人机路径规划系统及方法。
背景技术:
1、固定翼无人机具有飞行速度快、巡航时间长、抗干扰性强、运载能力大等特点,具有良好的应用前景与研究意义。智能、自主是近年来无人机技术发展的研究重点,路径规划是实现无人机自主导航与控制的重要组成部分。
2、目前路径规划大多针对旋翼无人机展开研究,并且具备较为成熟的技术予以应用,例如a*、rrt、遗传算法等路径规划方法。对于固定翼无人机,现有的研究大多将其作为一个质点,建模过程过于抽象和理想,导致在跟踪路径时出现跟踪效果差、航线相互交叉等问题,规划路径后往往需要结合繁琐的轨迹优化技术,例如多项式曲线、b样条、贝塞尔曲线等方法;其次是对于固定翼无人机自身的飞行状态与性能考虑不足,忽略实际中存在的燃油消耗、飞行转角、转弯半径等约束,导致路径仅可以通过仿真实现,在实际环境中无法跟踪,存在仿真结果置信度低的问题。
3、同时,对于故障/受损后的飞机的模型构建和容错控制研究已经得到了长足发展,包括故障检测与诊断技术、受损飞机模型构建方法以及主动、被动容错控制技术等,目前基于故障自适应的固定翼无人机路径规划系统性研究尚不成熟。为了保证整个飞行任务的高效完成,需要有机结合上述研究成果,针对固定翼无人机构建系统性架构,该架构能够根据飞机在故障/受损条件下的飞行状态自主、灵活地调整飞行方案与控制参数,从而使固定翼无人机在故障/受损状态下具有“自我恢复”能力。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种基于故障自适应的固定翼无人机路径规划系统及方法,根据飞机在故障/受损条件下的飞行状态,能够自主、灵活地调整飞行路径与控制参数,同时满足固定翼无人机模型与性能约束。
2、为实现上述目的,本发明采用如下技术方案:
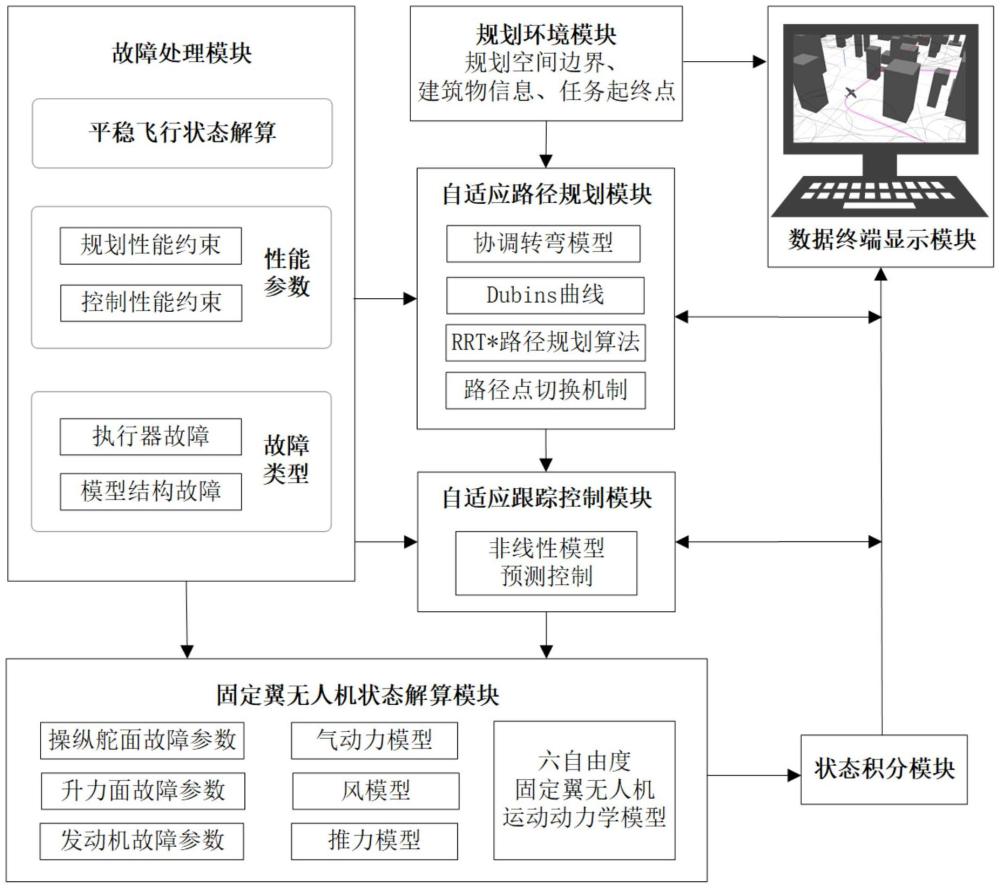
3、一种故障自适应的固定翼无人机路径规划系统,包含固定翼无人机状态解算模块、故障处理模块、规划环境模块、自适应路径规划模块、自适应跟踪控制模块、状态积分模块以及终端显示模块;
4、所述固定翼无人机状态解算模块在故障发生后基于故障类型对应的模型参数,包含操纵舵面故障参数、升力面结构故障参数以及发动机故障参数,做出调整,用于飞行状态的更新解算以及作为平稳飞行状态解算与自适应跟踪控制模块的模型约束;
5、所述故障处理模块包含故障类型分析、性能参数分析与平稳飞行状态解算;所述故障处理模块通过故障类型分析,例如执行器故障参数和模型结构故障,将量化后的故障参数(性能参数与模型参数)传输到自适应路径规划模块、自适应跟踪控制模块与固定翼无人机状态解算模块做出调整,通过性能参数分析得到控制性能约束与规划性能约束,并将正常或者故障后的性能约束与模型一同作为飞机平稳状态解算模块的输入,飞机平稳状态解算模块将根据期望的飞行速度、高度、爬升角等通过带约束非线性约束规划方法求解平稳的飞行状态及对应的操纵指令;
6、所述自适应路径规划模块基于飞机故障/正常条件下的平稳飞行状态与规划环境模块得到的环境信息,在满足规划性能约束的前提下,规划出一条绕开障碍物、从起点到终点的路径;
7、所述自适应跟踪控制模块在飞行过程中根据飞机的实时位姿与期望路径,在满足固定翼无人机故障/正常条件下的控制性能约束与模型约束,给出实时的控制指令,传输到固定翼无人机状态解算模块。
8、所述状态积分模块,它与固定翼无人机状态解算模块相连,用以飞行过程中将固定翼无人机的各个状态导数积分,得到实时位姿。
9、所述终端显示模块,它与规划环境模块、自适应路径规划模块和状态积分模块相连,用以将环境信息、规划出的路径点与航向信息和固定翼无人机飞行过程中的实时位姿传输到终端进行可视化展示。
10、进一步的,所述规划环境模块,与自适应路径规划模块与终端显示模块相连,用以设定规划空间边界、障碍物信息与飞行任务的起、终点信息。
11、进一步的,所述固定翼无人机状态解算模块还包含风模型、气动力模型、推力模型与六自由度固定翼运动动力学模型;所述风模型模拟飞行过程中的风干扰;所述气动力模型根据舵面指令、故障参数以及空速、迎角和侧滑角信息计算气动力(矩);所述推力模型根据油门量指令、发动机故障参数以及空速、迎角和侧滑角信息计算推力;所述六自由度固定翼运动动力学模型根据气动力(矩)与推力计算状态变量的导数。
12、进一步的,所述自适应路径规划模块包含协调转弯模型、dubins曲线、rrt*路径规划算法、路径点切换机制;
13、所述协调转弯模型,根据平稳飞行状态,结合规划性能参数,用于给出固定翼无人机最小转弯半径;
14、所述dubins曲线用于在规定始端和末端的切线方向的条件下确定平面两点的最短路径,并且在满足曲率约束;
15、所述rrt*路径规划算法,通过dubins曲线连接采样点,以确定从起点到终点的一条绕开环境中障碍物的可行路径;
16、所述路径点切换机制在飞行过程中重复运行,用以给出固定翼无人机飞行过程中期望到达的路径点与航向信息。
17、进一步的,所述自适应跟踪控制模块包含非线性模型预测控制结构;所述非线性模型预测控制结构与自适应路径规划模块、固定翼无人机状态解算模块与状态积分模块相连,在满足控制性能约束与模型约束的条件下,根据固定翼无人机的实时位姿与期望到达的路径点和航向信息给出实时控制指令。
18、一种故障自适应的固定翼无人机路径规划方法,包括以下步骤:
19、步骤s1:获取飞行任务的环境信息;
20、步骤s2:判断是否发生故障,如果发生故障则确定故障类型与量化后的故障参数,对模型与性能约束做出调整;
21、步骤s3:将正常或者故障条件下的性能参数与模型一同作为飞机平稳状态解算的约束,通过带约束非线性规划方法,输出正常/故障条件下的飞机平稳状态以及该状态下对应的控制量,执行步骤s4;如果平稳飞行状态求解失败,则视为无法完成任务,飞机应就近降落或者不执行飞行任务;
22、步骤s4:基于步骤s1给出的环境信息,根据步骤s3解算得到的固定翼无人机平稳飞行状态,得到从起点到终点的、一条绕开环境中障碍物、满足规划性能约束的、优化后的可行路径,包含飞行全过程需要跟踪的全部路径点与航向信息,将该数据进行存储;
23、步骤s5:对飞行任务全程实时监测,基于路径点切换机制,根据飞机的实时位姿给出当前时刻期望跟踪的路径点信息与参考航向;
24、步骤s6:根据步骤s5期望路径点与航向信息,结合实时监测得到的飞机位姿,给出满足控制约束与固定翼无人机模型约束的控制指令;
25、步骤s7:接收步骤s6的控制指令,更新固定翼无人机的位置、姿态信息,对实时数据进行更新。
26、进一步的,在步骤s1中,通过规划环境模块,通过前期勘测获取到获取规划空间、障碍物数据(包含数量、大小、位置),确定固定翼无人机飞行任务的起、终点;
27、进一步的,在步骤s2中,对故障类型与故障参数进行分析,具体包括以下步骤:
28、a1:判断是否发生故障,如果发生故障则进一步判断对固定翼无人机模型与性能产生影响的故障类型;
29、a2:确定故障类型对应的量化参数是性能参数还是模型参数,如果是性能参数需要进一步确定是规划性能参数还是控制性能参数;
30、a3:如果是模型参数(舵面故障参数、升力面故障参数与发动机故障参数等),则传输到固定翼无人机状态解算模块的对应位置做出调整。
31、进一步的,在步骤s3中,基于故障/正常条件下的固定翼无人机的性能约束与模型约束,通过带约束非线性约束规划方法,解算在给定的期望飞行状态点附近的控制量,包括副翼舵、升降舵、方向舵三个舵面偏角与油门开度,如果平衡点存在(即有解)则进行稳定性分析进行验证分析。
32、进一步的,在步骤s4中,基于故障/正常条件下的固定翼无人机平稳飞行状态进行满足性能约束的路径规划,具体包括以下步骤:
33、b1:根据步骤s3给出的平稳飞行状态,基于协调转弯模型,将固定翼无人机在当前平稳飞行速度vg*下的最大升力系数记为则根据协调转弯公式可得到当前速度下协调转弯的最大滚转角φmax以及对应的最小转弯半径rmin;
34、b2:将上述计算的最小转弯半径用作dubins曲线的曲率半径;
35、b3:在当前平稳飞行高度下,基于rrt*路径规划算法,根据步骤s1给出的环境信息,将dubins曲线作为连接两个采样点之间的路径,并且确定到达每个路径点的航向信息与路径长度,最终得到从起点到终点、一条绕开环境中障碍物、满足规划性能约束的可行路径;
36、b4:对路径进行裁剪优化,存储飞行全过程需要跟踪的全部路径点与航向信息。
37、进一步的,在步骤s6中,根据实时监测得到的飞机位姿,给出控制指令,具体包括:
38、c1:接收当前时刻期望得到的路径点与航向信息;
39、c2:计算固定翼无人机的实时位姿与期望到达的路径点和航向信息之间的偏差;
40、c3:基于非线性模型预测内、外环双层控制架构,在满足控制性能约束与模型约束的条件下,给出实时控制指令,包括副翼舵、升降舵、方向舵三个舵偏角与油门开度。
41、进一步的,在步骤s7中,根据控制指令对固定翼无人机的状态进行更新,具体包括:
42、d1:通过风模型得到空速、迎角和侧滑角;
43、d2:接收步骤s6给出的舵面指令与油门量指令计算气动力(矩)和推力;
44、d3:根据六自由度固定翼运动动力学模型计算状态变量的导数;
45、d4:通过状态积分进行更新固定翼无人机的位置、姿态信息。
46、与现有技术相比,本发明所达到的有益效果是:
47、本发明提出了一种故障自适应的固定翼无人机路径规划系统及方法,确定了相关技术路线,通过固定翼无人机状态解算模块构建了比较精确的固定翼无人机六自由度解算模型,包括运动动力学特性、风特性、气动力特性、推力特性等;通过故障处理模块对会对固定翼无人机性能与模型造成影响的故障类型进行分析与量化处理,并且给出在故障/正常条件下的平稳飞行状态;基于求出的平稳飞行状态通过自适应路径规划模块输出一条满足规划性能约束的路径;通过自适应跟踪控制模块在满足当前控制约束与模型约束的前提下跟踪规划出来的路径,并且通过终端显示模块对环境、参考路径以及固定翼无人机飞行状态的实时数据进行监测;在路径规划过程中考虑了固定翼无人机的飞行状态与规划性能约束,提高了路径的可跟踪性,并且可以根据故障类型进行自适应调整,同时集成自适应跟踪控制技术,实现路径从规划到跟踪的一体化研究,使得固定翼无人机能够根据故障/正常条件下的飞行状态,自主、灵活地调整飞行路径与控制参数,提高固定翼无人机应用的自主化与智能化。
本文地址:https://www.jishuxx.com/zhuanli/20240730/149320.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。