一种柔性机床动力传动系统位置PID智能优化控制方法
- 国知局
- 2024-07-30 09:25:18
本发明涉及先进制造领域柔性机床智能控制,尤其涉及一种柔性机床动力传动系统位置pid智能优化控制方法。
背景技术:
1、柔性机床动力传动系统在先进制造领域中的应用非常广泛。工业界对柔性机床在位置控制速度和精度方面的要求尤为突出。而数控机床的最高运动速度、跟踪精度和定位精度等重要指标均取决于驱动及位置控制系统的动态和静态性能。柔性机床动力传动系统的位置控制通过对角位移的控制来实现对工作台的快速精确控制。由于pid控制器具有概念明晰、实现简单、鲁棒性强等优点,因此在工业控制系统中得到了广泛的应用。位置控制系统的pid控制是通过设计高可靠、高精度和强鲁棒性的pid控制器对输出位置误差进行控制,从而提高位置控制系统的动态响应性能,实现对控制对象的快速精确控制。然而,目前工业界主要采用基于经验规则的工程整定方法实现pid控制器参数整定,这就要求工程设计人员具有较丰富的经验;此外,针对复杂工程系统和复杂动态工况等应用场景,仅凭经验的整定方法难以实现控制系统的优化设计,难以保证高可靠、高精度和强鲁棒性的控制性能。
2、近年来,基于进化算法和群体智能的智能pid控制技术已在部分过程控制系统、电力系统和电力电子功率变换系统等领域得以较为成功的应用,但在柔性机床动力传动系统领域鲜有研究报道。因此,如何针对柔性机床动力传动系统进行智能pid控制器设计,亟待进一步研发。
技术实现思路
1、本发明的目的在于针对现有技术的不足,提供一种柔性机床动力传动系统位置pid智能优化控制方法。
2、本发明的目的是通过以下技术方案来实现的:一种柔性机床动力传动系统位置pid智能优化控制方法,包括以下步骤:
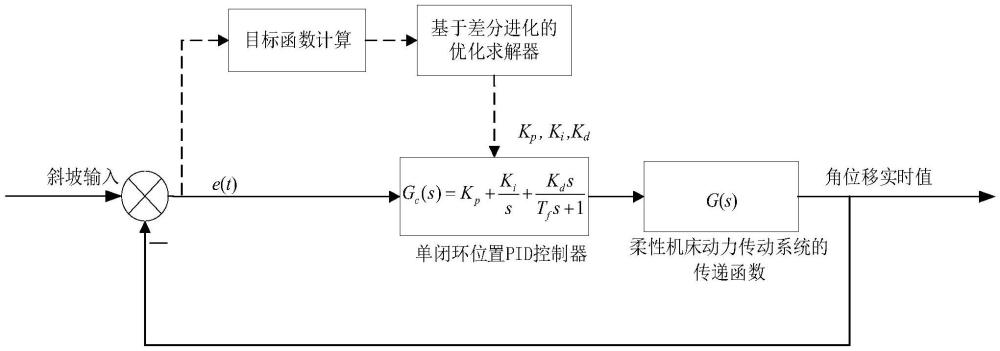
3、(1)通过机理分析法建立阻尼情形下柔性机床动力传动系统的传递函数模型和单闭环位置pid控制模型,并设置优化求解器的参数值,该参数包括变异因子f、交叉因子cr、种群规模m和最大迭代次数imax;
4、(2)随机生成一个在柔性机床动力传动系统位置pid控制器优化变量下限pl和上限pu之间范围内的实数编码初始种群其中表示初始种群,ri表示在[0,1]范围内产生的随机数,第i个个体pxi=(kpi,kii,kdi),kpi、kii、kdi分别表示第i个个体所对应的pid控制器的比例系数、积分系数、微分系数;
5、(3)计算种群中的每一个个体的目标函数值fxi,其中表示第g次迭代优化时的种群,1≤g≤imax;并将当前种群中最小的目标函数值设置为fbest,将对应的个体设置为当前最好解sbest;
6、(4)对种群中的个体进行变异,获取对应的变异中间个体
7、(5)对变异产生的每个变异中间个体进行交叉操作,获得交叉后的个体
8、(6)计算交叉后的个体和变异前的个体的目标函数值,将获得的目标函数值分别标记为和并对个体进行选择,得到新的种群
9、(7)计算种群中的每个个体的目标函数值,将获得的目标函数值标记为fxi,得到种群中的最优目标函数值fxb=min{fxi,i=1,2,...,m},将对应的个体设置为当前最优解sxb;
10、(8)若fbest≥fxb,则设置为fbest=fxb,sbest=sxb;否则,保持原有fbest和sbest不变;
11、(9)重复步骤(4)~步骤(8),直至达到预先设定的最大迭代优化次数imax,即满足g=imax;
12、(10)输出最终的最佳目标函数值fbest和最佳pid控制器参数sbest=(kpb,kib,kdb),其中kpb、kib、kdb分别表示pid控制器的最佳比例系数、积分系数、微分系数;将kpb、kib、kdb传输至柔性机床动力传动系统位置pid控制器中,获得柔性机床动力传动系统在斜坡输入下的角位移实时输出波形和角位移实时跟踪误差波形。
13、进一步地,所述柔性机床动力传动系统的传递函数模型的表达式为:
14、
15、其中,g(s)是柔性机床动力传动系统的传递函数模型,s为拉普拉斯变换的复变量,n为传动比,k为扭转弹性系数,im为电机的转动惯量,il为负载的转动惯量,cm为电机的粘性摩擦系数,cl为负载轴的粘性摩擦系数。
16、进一步地,所述单闭环位置pid控制模型的表达式为:
17、
18、其中,gc(s)是单闭环位置pid控制模型,tf是惯性时间系数,kp、ki、kd分别表示pid控制器的比例系数、积分系数、微分系数。
19、进一步地,所述目标函数的表达式为:
20、
21、其中,f表示目标函数,e(t)表示位置pid闭环控制系统的角位移跟踪误差,t表示系统运行时刻值,tm表示系统运行时间窗的最大时间值。
22、进一步地,所述对种群中的个体进行变异,获取对应的变异中间个体具体包括:
23、首先从种群中随机选择2个个体,分别将其标记为且i≠r1≠r2;
24、
25、
26、再按照公式(4)~公式(5)对种群中的每个个体进行变异,以产生对应的变异中间个体
27、进一步地,所述获得交叉后的个体具体包括:
28、按照公式(6)对变异产生的每个变异中间个体进行交叉操作,获得交叉后的个体
29、
30、其中,randl为[0,1]之间的随机小数,cr为交叉因子,
31、进一步地,所述对个体进行选择,得到新的种群具体包括:
32、
33、基于交叉后的个体的目标函数值和变异前的个体的目标函数值按照公式(7)对个体进行选择,得到新的种群
34、本发明的有益效果是,本发明能够实现对柔性机床动力传动系统角位移的快速精准控制,有利于减小跟踪误差,有助于缩短响应时间,具有更小的跟踪误差、更短的响应时间,实现了角位移pid控制器参数的高效优化整定。
技术特征:1.一种柔性机床动力传动系统位置pid智能优化控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的柔性机床动力传动系统位置pid智能优化控制方法,其特征在于,所述柔性机床动力传动系统的传递函数模型的表达式为:
3.根据权利要求1所述的柔性机床动力传动系统位置pid智能优化控制方法,其特征在于,所述单闭环位置pid控制模型的表达式为:
4.根据权利要求1所述的柔性机床动力传动系统位置pid智能优化控制方法,其特征在于,所述目标函数的表达式为:
5.根据权利要求1所述的柔性机床动力传动系统位置pid智能优化控制方法,其特征在于,所述对种群中的个体进行变异,获取对应的变异中间个体具体包括:
6.根据权利要求1所述的柔性机床动力传动系统位置pid智能优化控制方法,其特征在于,所述获得交叉后的个体具体包括:
7.根据权利要求1所述的柔性机床动力传动系统位置pid智能优化控制方法,其特征在于,所述对个体进行选择,得到新的种群具体包括:
技术总结本发明公开了一种柔性机床动力传动系统位置PID智能优化控制方法,该方法通过机理分析法建立阻尼情形下柔性机床传动系统的传递函数模型,将角位移单闭环PID控制器的控制参数作为优化变量,采用角位移跟踪误差的绝对值与时间的乘积作为评估控制性能的优化目标函数,设计基于差分进化的智能优化求解器实现PID控制器多控制参数的优化整定,从而实现对角位移的高精度、高可靠的智能控制。本发明能够实现对柔性机床动力传动系统角位移的快速精准控制,有利于减小跟踪误差、缩短响应时间,并实现了角位移PID控制器参数的高效优化整定。技术研发人员:王欢,陈刚受保护的技术使用者:重庆大学技术研发日:技术公布日:2024/7/23本文地址:https://www.jishuxx.com/zhuanli/20240730/149400.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。