一种微型探测器的运动轨迹规划方法
- 国知局
- 2024-07-30 09:27:07
本发明涉及小行星探测器控制,具体而言,涉及一种微型探测器的运动轨迹规划方法。
背景技术:
1、小行星体积较小,形状不规则,其重力场较弱且呈现出复杂多样的特点,使得在进行小行星表面探测时,难以使用传统的轮式探测器。为此提出了多种用于小行星表面移动的探索方案,包括依靠立方体动量轮跳跃式探测器进行探测、依靠双轮加动量轮跳跃式探测器进行探测以及依靠海胆伸缩腿式探测器进行探测,但目前只有基于动量轮跳跃翻滚式的封闭式探测器在实际探测任务中具备较好的应用前景,因此,研究基于动量轮跳跃翻滚式探测器的运动轨迹规划方案,以保障探测器按照要求可靠地在小天体表面移动,是当前亟待解决的问题。
技术实现思路
1、本发明解决的问题是:提供了一种微型探测器的运动轨迹规划方法,能够有效地规划微型探测器执行探测任务时的运动轨迹,利于实际应用。
2、为解决上述问题,本发明提供了一种微型探测器的运动轨迹规划方法,包括:
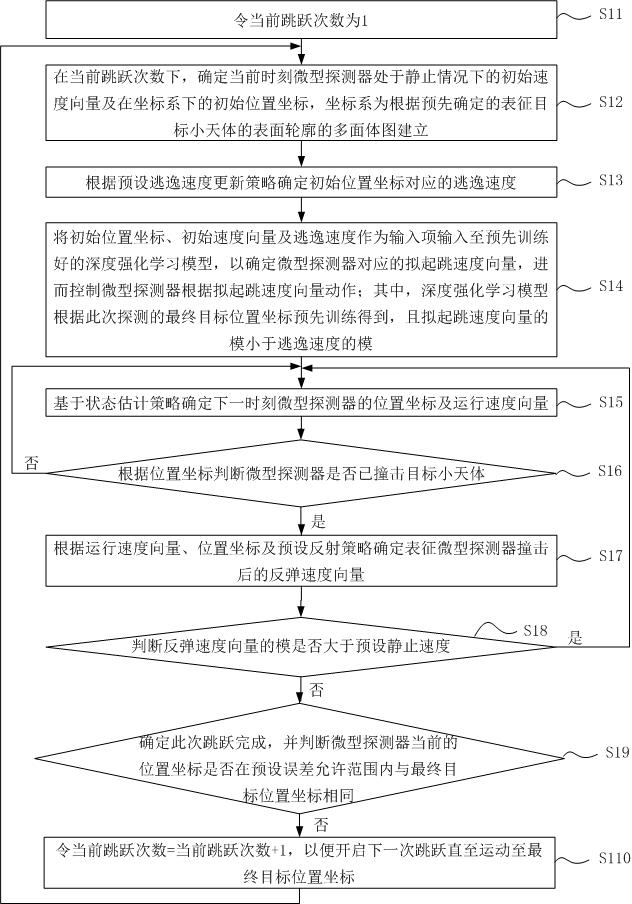
3、s11:令当前跳跃次数为1;
4、s12:在当前跳跃次数下,确定当前时刻微型探测器处于静止情况下的初始速度向量及在坐标系下的初始位置坐标,所述坐标系为根据预先确定的表征目标小天体的表面轮廓的多面体图建立;
5、s13:根据预设逃逸速度更新策略确定所述初始位置坐标对应的逃逸速度;
6、s14:将所述初始位置坐标、所述初始速度向量及所述逃逸速度作为输入项输入至预先训练好的深度强化学习模型,以确定所述微型探测器对应的拟起跳速度向量,进而控制所述微型探测器根据所述拟起跳速度向量动作;其中,所述深度强化学习模型根据此次探测的最终目标位置坐标预先训练得到,且所述拟起跳速度向量的模小于所述逃逸速度的模;
7、s15:基于状态估计策略确定下一时刻所述微型探测器的位置坐标及运行速度向量;
8、s16:根据所述位置坐标判断所述微型探测器是否已撞击所述目标小天体;若是,进入s17;若否,返回s15;
9、s17:根据所述运行速度向量、所述位置坐标及预设反射策略确定表征所述微型探测器撞击后的反弹速度向量;
10、s18:判断所述反弹速度向量的模是否大于预设静止速度;若是,进入s15;若否,进入s19;
11、s19:确定此次跳跃完成,并判断所述微型探测器当前的位置坐标是否在预设误差允许范围内与所述最终目标位置坐标相同;若否,进入s110;
12、s110:令当前跳跃次数=当前跳跃次数+1并返回s12,以便开启下一次跳跃直至运动至所述最终目标位置坐标。
13、本发明的有益效果为:本技术提供的方案能够有效地规划微型探测器执行探测任务时的运动轨迹,使其可靠地运动至待探测的最终目标位置;预先训练好了深度强化学习模型以得到拟起跳速度向量且该向量的模小于逃逸速度的模,而微型探测器在起跳后的弹跳过程中能量会逐渐衰减所以更不会出现逃逸情况,使得该方案能够有效避免微型探测器在执行探测任务过程中产生逃逸,利于实际应用。
14、进一步的,步骤s12中的表征目标小天体的表面轮廓的多面体图的确定,包括以下步骤:
15、获取目标小天体的表面的散点扫描图;
16、根据所述散点扫描图将所述目标小天体建模为恒定密度的多面体,以得到对应的多面体图;其中,所述多面体图包括多个相交的三角面且任意两个相交的三角面之间仅有一条公共棱边相交,所述三角面的三个顶点为所述散点扫描图中的散点。
17、本方案中,通过上述方式能够可靠地确定包括表面非规则小天体在内的各种目标小天体的多面体图,以将该多面体图作为后续运动轨迹规划的基础。
18、进一步的,根据预设逃逸速度更新策略确定所述初始位置坐标对应的逃逸速度,包括:
19、基于引力值一般表达式确定所述初始位置坐标处对应的引力值;
20、所述引力值一般表达式为:
21、;
22、其中,表示引力值,表示所述微型探测器当前所处位置的初始位置坐标,为引力常数,为所述目标小天体的密度,表示所述三角面的集合且为中的任一个三角面,表示的三个棱边的集合且为的任一个棱边,表示从的中点至的向量,表示从的几何中心至的向量,为基于第一预设关系式确定的边积分计算矩阵,为基于第二预设关系式确定的面积分计算矩阵,为基于第三预设关系式确定的第一几何属性矩阵,为基于第四预设关系式确定的第二几何属性矩阵;
23、所述第一预设关系式为:
24、;
25、其中,表示指向的外部的、的法向量,表示在内的的外法线方向对应的第一矢量,表示在内的的外法线方向对应的第二矢量且为与相交的三角面;
26、所述第二预设关系式为:
27、;
28、所述第三预设关系式为:
29、;
30、其中,表示到的第一个顶点的矢量,表示到的第二个顶点的矢量,表示的实际长度;
31、所述第四预设关系式为:
32、;
33、其中,表示到的第一个顶点的矢量,表示到的第二个顶点的矢量,表示到的第三个顶点的矢量;
34、根据所述引力值确定所述初始位置坐标对应的逃逸速度。
35、本方案中,通过上述方式可以可靠地确定不同位置处的逃逸速度,利于后续确定拟起跳速度向量。
36、进一步的,根据所述运行速度向量、所述位置坐标及预设反射策略确定表征所述微型探测器撞击后的反弹速度向量,包括:
37、根据所述位置坐标确定所述微型探测器当前撞击的目标三角面;
38、根据预设反射公式确定表征所述微型探测器撞击后的反弹速度向量的方向;
39、所述预设反射公式为:
40、;
41、其中,为所述运行速度向量,表示所述目标三角面的法向量;
42、根据第五预设关系式确定表征所述微型探测器撞击后的反弹速度向量的大小;
43、所述第五预设关系式为:
44、;
45、其中,表示预设恢复系数。
46、进一步的,根据所述位置坐标确定所述微型探测器当前撞击的目标三角面,包括:
47、针对任一个三角面,确定所述位置坐标与所述三角面的三个顶点的欧几里得范数之和为数值基准;
48、确定各所述数值基准中的最小值,以便将最小的数值基准对应的三角面作为目标三角面。
49、本方案中,通过上述设置实现了微型探测器在目标小天体表面开展一次跳跃后,经过飞行、落地及弹跳,直至能量衰减至停止的全过程路径计算方法。
50、进一步的,基于状态估计策略确定下一时刻所述微型探测器的位置坐标及运行速度向量,包括:
51、根据预先建立好的状态方程确定下一时刻所述微型探测器的位置坐标及运行速度向量;所述状态方程中定义状态向量为,且其中表示所述微型探测器的位置向量,表示所述微型探测器的运行速度向量的三轴分量;
52、所述状态方程为:
53、;
54、其中,表示状态向量的一阶导数,为所述目标小天体的自旋角速度,表示根据预设主引力加速度确定策略确定的引力加速度的三轴分量。
55、进一步的,根据预设主引力加速度确定策略确定引力加速度,包括:
56、根据不确定模型确定引力加速度,所述不确定模型表示为:
57、;
58、其中,为基于预先确定的引力值一般表达式得到的标准引力值矢量,表示随机扰动且满足高斯分布。
59、本方案中,通过上述方式可以利用来表征目标小天体质量不均匀导致引力的高斯不确定性,进而确定引力加速度。
60、进一步的,根据所述位置坐标判断所述微型探测器是否已撞击所述目标小天体,包括:
61、根据第六预设关系式确定用于衡量当前所述微型探测器与所述目标小天体的接触关系的总带符号投影;
62、所述第六预设关系式为:
63、;
64、其中,为引力常数,为所述目标小天体的密度,为基于所述微型探测器当前所处的位置坐标及第四预设关系式确定的第二几何属性矩阵;
65、判断所述总带符号投影是否等于0;
66、若是,判定所述微型探测器未撞击所述目标小天体;
67、若否,判定所述微型探测器已撞击所述目标小天体。
68、进一步的,根据此次探测的最终目标位置坐标预先训练所述深度强化学习模型的步骤,包括:
69、构建包括状态空间、动作空间及奖励函数的强化学习环境;其中:
70、定义所述状态空间内的状态量包括位置矢量及速度矢量,且所述位置矢量的坐标范围被约束在所述目标小天体的边界球场点坐标范围内,所述速度矢量的模的取值范围小于所述微型探测器当前所在位置对应的逃逸速度;
71、定义所述动作空间内的动作包括所述微型探测器的拟起跳速度向量,所述拟起跳速度向量的方向位于预设摩擦锥之内且所述拟起跳速度向量的模小于所述逃逸速度的模,所述预设摩擦锥为以所述当前所在位置对应的三角面的法向量为中轴线、以所述微型探测器的最大起跳角的余角为半顶角构成的圆锥;
72、定义用于激励所述微型探测器向所述最终目标位置坐标运动的所述奖励函数;
73、利用预设神经网络与所述强化学习环境交互,以调整所述预设神经网络的参数,进而在达到预设训练终止条件时确定所述深度强化学习模型训练完成。
74、进一步的,定义用于激励所述微型探测器向所述最终目标位置坐标运动的所述奖励函数,包括:
75、定义稀疏奖励函数及连续密集奖励函数作为用于激励所述微型探测器向所述最终目标位置坐标运动的所述奖励函数;
76、所述稀疏奖励函数表示为:
77、;
78、其中,为当前所述预设神经网络输出的且属于所述动作空间内的一个动作,为动作被执行后所述微型探测器的状态,表示处于与所述最终目标位置坐标对应的目标区内的状态时的第一奖励值,表示处于与所述最终目标位置坐标对应的目标区内的状态时的第二奖励值,表示奖励权重,表示执行动作而达到状态时对应的能耗奖励值,表示基于第七预设关系式确定的执行动作所需的能量,所述第七预设关系式为:
79、;
80、其中,表示所述微型探测器的动量轮对应的输出力矩矩阵,表示所述动量轮的角速度,为表示步长时间;
81、所述连续密集奖励函数表示为:
82、;
83、其中,表示用于以指数形式奖励所述微型探测器向所述最终目标位置坐标运动的指数型奖励函数,表示用于惩罚所述微型探测器的多余跳跃动作的惩罚型奖励函数,表示用于限制所述微型探测器在所述最终目标位置坐标附近的最大运动范围内运动的预设距离参数,为所述微型探测器当前所在位置与所述最终目标位置坐标之间的距离,为用于控制指数型奖励的奖励程度的第一缩放因子,为用于控制惩罚型奖励的奖励程度的第二缩放因子。
84、本方案中,通过稀疏奖励函数及连续密集奖励函数的设置,可以可靠地引导微型探测器不断地向最终目标位置坐标处运动,利于探测任务的完成。
本文地址:https://www.jishuxx.com/zhuanli/20240730/149466.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表