一种基于人工势能场的新型无人机智能巡检路径规划方法与流程
- 国知局
- 2024-07-30 09:28:16
本发明涉及无人机巡检路径规划领域,具体为一种基于人工势能场的新型无人机智能巡检路径规划方法。
背景技术:
1、输电线路由于架空线路分布广泛,长期暴露于大自然下运行,风吹日晒加上日用损耗,导致线路老化、绝缘子损坏以及外力破坏等故障频繁出现,因此输电线路巡检是电力运维部门的一项艰巨任务。巨大的人力资源成本是传统巡检的一个显著特征:工作人员用眼睛或望远镜及其它仪器设备一起对输电线路的各部件进行观测和检查。由于输电线路时常架设在山川丛林中,复杂的地理环境不仅给巡检人员的巡查带来挑战,而且攀爬高架线路和接触高压电路也时常威胁着工作人员的生命安全,因此巡检无人化技术呼之欲出。无人机由于其便携性好,自主性高,对环境适应性强,飞行精度高等优点,被广泛应用于输电线路的自动巡检工作。无人机自动巡检技术不但可以代替人工执行危险任务,且其巡检效率也大大超出人工效率。
2、现阶段无人机自主巡检更多采用的是人工路径控制,或者人工三维点云航迹规划。然而这些方法一方面存在人员不熟悉无人机导致炸机等风险,另一方面难以确认飞行路径中的障碍物,导致无人机可能撞上障碍物,因此目前的无人机自动巡检技术缺乏一种自主抵达巡检点且自主规避障碍物的智能化巡检系统。
技术实现思路
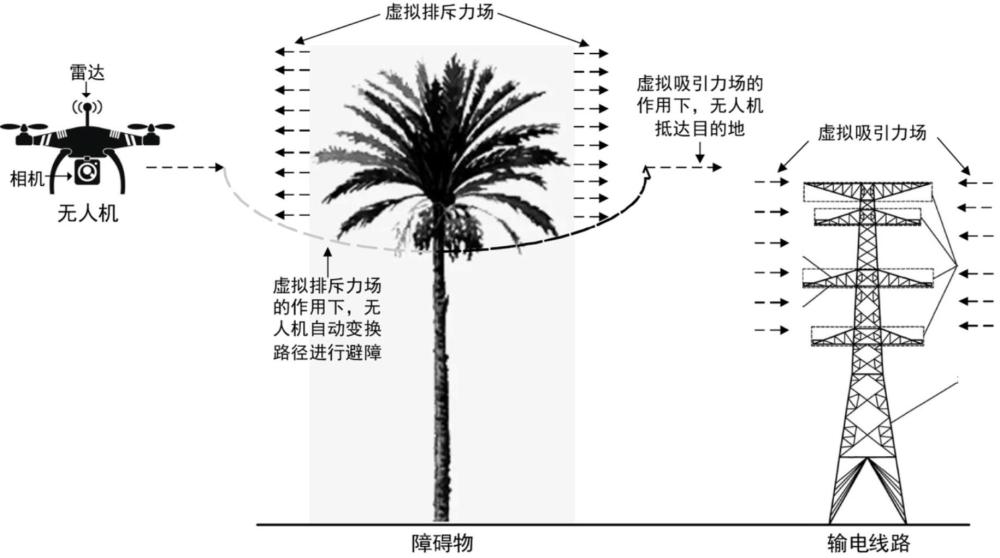
1、本发明目的是提供一种基于人工势能场的新型无人机智能巡检路径规划方法,此方法能够应用于输电线路自动巡检作业中,在指定无人机巡检高度和待巡检点北斗导航地理坐标后,无人机将自动规划飞行轨迹,利用毫米波雷达探测飞行轨迹前进方向的障碍物,并实时更新飞行轨迹进行自动避障,抵达待巡检点后利用无人机携带的照相机等检查设备对输电线路待检测点进行炸机检查;且无人机飞行全程无需人工介入,有效规避人工操作失误以及未知的障碍物带来的风险,达到了无人机自动巡检技术智能化需求。
2、为了实现上述的技术特征,本发明的目的是这样实现的:一种基于人工势能场的新型无人机智能巡检路径规划方法,所述路径规划方法包括:
3、s1,设置输电线路的待巡检点的北斗导航位置;
4、s2,计算输电线路的待巡检点对无人机施加的虚拟吸引力场;
5、s3,计算障碍物对无人机施加的虚拟排斥力场;
6、s4,计算无人机在人工势能场中局部极小值处的虚拟旋转力场;
7、s5,获取虚拟力场之和,得到参考加速度,利用参考加速度设置速度航迹点;
8、s6,然后通过无人机飞控系统的位置控制器和姿态控制器,将控制信号传输到无人机的底层电传伺服控制器力,最终构成了无人机自主智能巡检路径规划系统,无人机将会按照人工势能场的既定路线飞行,抵达目的地且自主避障。
9、所述虚拟吸引力场的数学表达式为:
10、无人机起飞后,输电线路的待巡检点会对无人机施加一个虚拟吸引力场,这种虚拟吸引力场同无人机到待巡检点之间的距离相关,距离越大,吸引力越大;距离越小,吸引力越小;
11、所述虚拟吸引力场的引力采用指数关系,进而使其符合无人机的pid飞行控制器的性能要求;
12、定义和分别是输电线路的待巡检点和无人机的北斗导航坐标位置,是无人机的速度,是无人机到待巡检点的之间的距离,其中,和为向量,那么根据指数人工势能场定义,待巡检点对无人机的虚拟吸引力为:
13、(1)
14、式中,和是吸引力大小的正增益,与的之和决定了虚拟吸引力大小的最大值,和是正常数,以便于识别产生最大吸引力的最小距离和最小速度。
15、所述虚拟排斥力场的数学表达式为:
16、无人机前往待巡检点的飞行过程中,当待巡检点位于山川丛林中时,飞行路线会出现大树、建筑物障碍物,此时需要无人机能够自主识别障碍物位置并重新规划避障路线;
17、此时,通过无人机自身携带的毫米波雷达传感器,实时探测周围障碍物信息;当无人机距离障碍物小于安全距离时,毫米波雷达传感器能够迅速准确探测到相关数据,瞬间传给无人机飞控系统,此时无人机飞控系统会给探测到的障碍物设置虚拟排斥力场,及时做出绕飞规避动作,避免飞行事故发生,保障飞行安全;
18、定义是障碍物的北斗导航坐标位置,是无人机到障碍物之间的距离,其中,为向量,那么根据指数人工势能场定义,障碍物对无人机的虚拟排斥力为:
19、(2)
20、式中,和是排斥力大小的正增益,、之和决定了虚拟排斥力大小的最大值,和是正常数,以便于识别产生最大排斥力的最小距离和最小速度。
21、所述毫米波雷达传感器的运行频率能够达到30hz。
22、所述虚拟旋转力场的数学表达式为:
23、人工势能场能够在空间中构建虚拟势能场,在虚拟引力场和虚拟斥力场共同作用下,无人机不仅能够自主规划飞行路线,还能智能避障,避免事故发生;
24、基于人工势能场固有的局部极小值震荡问题,即当出现,其中是任意小的正数,也就是无人机的虚拟吸引力和虚拟排斥力之和接近于零,此时无人机会在局部位置做震荡动作而不能进行正常飞行;
25、此时,提出虚拟旋转力场,当无人机处于局部极小值时,这种虚拟旋转力场能够让无人机摆脱局部极小值位置,还原到正常飞行路线中,虚拟旋转力为:
26、(3)
27、式中,和是旋转力大小的正增益,、之和决定了虚拟旋转力大小的最大值,和是正常数,以便于识别产生最大旋转力的最小距离和最小速度;
28、其中这种虚拟旋转力场是由障碍物提供的,只有当无人机处于局部极小值的位置时才会产生旋转力场,且其方向与障碍物的虚拟排斥力方向正交。
29、在无人机飞行过程中,无人机飞控系统会实时计算无人机的虚拟力场之和:
30、(4)
31、由于 f是向量,包含虚拟力场和的大小和方向,因此能够计算出无人机的实时参考加速度值大小和方向,无人机获取到实时的参考加速度数据后,利用参考加速度设置速度航迹点,然后通过无人机飞控系统的位置控制器和姿态控制器,将控制信号传输到无人机的底层电传伺服控制器力,进而构成无人机自主智能巡检路径规划系统,无人机将会按照人工势能场的既定路线飞行。
32、本发明有如下有益效果:
33、1、本发明方法能够应用于输电线路自动巡检作业中,在指定无人机巡检高度和待巡检点北斗导航地理坐标后,无人机将自动规划飞行轨迹,利用毫米波雷达探测飞行轨迹前进方向的障碍物,并实时更新飞行轨迹进行自动避障,抵达待巡检点后利用无人机携带的照相机等检查设备对输电线路待检测点进行炸机检查;且无人机飞行全程无需人工介入,有效规避人工操作失误以及未知的障碍物带来的风险,达到了无人机自动巡检技术智能化需求。
34、2、本发明在人工势能场的方法下,获取虚拟力之和,得到参考加速度,利用参考加速度设置速度航迹点,然后通过无人机飞控系统的位置控制器和姿态控制器,将控制信号传输到无人机的底层电传伺服控制器力,就构成了无人机自主智能巡检路径规划系统。
35、3、本发明通过提出了一种垂直于排斥力的虚拟旋转力场,解决人工势能场存在的局部极小值震荡问题,保证了当无人机处于局部极小值时,这种虚拟旋转力场能够让无人机摆脱局部极小值位置,还原到正常飞行路线中。
本文地址:https://www.jishuxx.com/zhuanli/20240730/149541.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表