航天器时间基准稳定度测量方法和系统与流程
- 国知局
- 2024-07-30 09:41:49
1.本发明涉及时间基准稳定度测量技术领域,具体地,涉及一种航天器时间基准稳定度测量方法和系统。背景技术:2.时间基准表征航天器综合电子分系统时间稳定性的重要性能指标,综合电子分系统的自身稳定度一般分为长期稳定度和短期稳定度,是指在不介入导航航天器的自主校时情况下的稳定度,自身稳定度可反映综合电子分系统的高稳晶振的性能指标。综合电子分系统时间基准一般采用频率为10mhz高稳晶振,经过多级分频,驱动48bit计数器,时钟最小分辨率为0.1ms。时钟采用累计时间,时间起点为(utc)时间。3.经过对现有技术的检索,申请公布号为cn108732597a的发明专利公开了一种多航天器导航系统的时间基准建立方法及系统,该方法和系统包括:获取多航天器导航系统的地面站gnss观测数据和星载gnss观测数据,分别根据地面站gnss观测数据和星载gnss观测数据构建对应的地面站观测模型和星载gnss观测模型;根据地面站观测模型和星载gnss观测模型,对多航天器导航系统中的导航航天器以及低轨航天器进行联合精密定轨和时间同步,获取各个航天器导航系统的钟差;根据各个航天器导航系统的钟差构建多航天器导航系统的时间尺度;将时间尺度约束到某一航天器导航系统的系统时间下,生成多航天器导航系统中各个航天器的统一时间基准。然而该专利无法测量航天器综合电子分系统时间基准稳定度。4.申请公布号为cn111224733b的发明专利公开了“时间校准方法、装置、计算和存储介质”,该系统包括:该系统向服务器发送第一时间校准请求,待接收服务器反馈的第一时间同步信息,根据所述第一时间同步信息对内部rtc进行第一时间校准;向服务器发送第二时间校准请求,待接收服务器反馈的第二时间同步信息,根据所述第二时间同步信息对内部rtc当前时刻,对内部rtc进行第二时间校准或者重新进行第一次时间校准。然而该专利无法测量航天器综合电子分系统时间基准稳定度。5.申请公布号为cn112379120a的发明专利公开了“一种速度采集时刻获取方法、装置、设备及存储介质”,该方法和系统包括:在接收到编码测速单元基于时间校准请求反馈的时间校准响应时间久,记录响应接收时刻;根据所述时间校准请求、所述时间校准响应及所述响应接收时刻确定测速延迟值;在接收到所述译码测速单元采集的速度时间信息时,根据所述速度时间信息及所述测速延迟值确定速度采集时刻。然而该专利无法测量航天器综合电子分系统时间基准稳定度。技术实现要素:6.针对现有技术中的缺陷,本发明的目的是提供一种航天器时间基准稳定度测量方法和系统。7.根据本发明提供的航天器时间基准稳定度测量方法,包括:8.步骤1:通过地面天线、上下变频器、测控基带建立星地测控链路,并通过接收软件、解析软件和显示软件进行数据接收、处理和显示;9.步骤2:进行地面时间基准设置;10.步骤3:进行地面时间码选择,将测控基带的时间码与星上遥测进行组遥测帧,遥测帧中的航天器时间码与测控基带时间码进行对应;11.步骤4:通过比较遥测帧同步脉冲时间码与卫星时间码差值的绝对值与平均值的大小来计算时间稳定度。12.优选的,进行测控基带时间基准参考设置,在测控基带软件中将时间基准设置为外参考,将测控基带的时间输入硬件接口接时间服务器,将测控10mhz外参考连接铷钟,将时间服务器10mhz外参考连接铷钟。13.优选的,在地面测控基带设备完成遥测帧同步的同时输出帧同步脉冲,并将基带设备遥测帧同步脉冲锁存的时间封装在遥测帧数据前面,将对应时间码显示在地面综合处理软件中。14.优选的,采用最值插值法进行预设长期稳定度和预设短期稳定度计算。15.优选的,时间稳定度计算包括:16.计算出星时ts与基带时间tg的差值序列{tn},n=0,1,2,…;17.tn=ts-tg…………(1)18.求出差值序列的平均值μ:[0019][0020]求出差值序列{tn}的标准差:[0021][0022]根据本发明提供的航天器时间基准稳定度测量系统,包括:[0023]模块m1:通过地面天线、上下变频器、测控基带建立星地测控链路,并通过接收软件、解析软件和显示软件进行数据接收、处理和显示;[0024]模块m2:进行地面时间基准设置;[0025]模块m3:进行地面时间码选择,将测控基带的时间码与星上遥测进行组遥测帧,遥测帧中的航天器时间码与测控基带时间码进行对应;[0026]模块m4:通过比较遥测帧同步脉冲时间码与卫星时间码差值的绝对值与平均值的大小来计算时间稳定度。[0027]优选的,进行测控基带时间基准参考设置,在测控基带软件中将时间基准设置为外参考,将测控基带的时间输入硬件接口接时间服务器,将测控10mhz外参考连接铷钟,将时间服务器10mhz外参考连接铷钟。[0028]优选的,在地面测控基带设备完成遥测帧同步的同时输出帧同步脉冲,并将基带设备遥测帧同步脉冲锁存的时间封装在遥测帧数据前面,将对应时间码显示在地面综合处理软件中。[0029]优选的,采用最值插值法进行预设长期稳定度和预设短期稳定度计算。[0030]优选的,时间稳定度计算包括:[0031]计算出星时ts与基带时间tg的差值序列{tn},n=0,1,2,…;[0032]tn=ts-tg…………(1)[0033]求出差值序列的平均值μ:[0034][0035]求出差值序列{tn}的标准差:[0036][0037]与现有技术相比,本发明具有如下的有益效果:[0038]本发明提供了一种航天器综合电子分系统时间基准稳定度测量方法,利用地面设备、测试软件和最值差值法,使用户能够方便快捷地测量航天器综合电子分系统的短期稳定度和长期稳定度,并对数据进行计算和比对。附图说明[0039]通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:[0040]图1为本发明的测试流程图;[0041]图2为本发明的系统原理图;[0042]图3为本发明的短期时间稳定度分析图;[0043]图4为本发明的长期时间稳定度分析图。具体实施方式[0044]下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。[0045]实施例:[0046]如图1和图2,本发明提供了一种航天器时间基准稳定度测量方法,包括如下步骤:[0047](一)建立星地测控链路[0048]通过地面天线、上下变频器、测控基带以及转发软件、服务器软件和显示终端软件等设备和软件建立星地测控链路。[0049](二)地面时间基准设置[0050]1)将测控基带设备的设置为外参考,将gps时间服务器作为测控基带设备的时间参考;[0051]2)将测控基带、时间服务器的10mhz外参考连接铷钟。[0052](三)地面时间码选择[0053]地面测控基带设备完成遥测帧同步的同时,输出帧同步脉冲,并将基带设备遥测帧同步脉冲锁存的时间tg封装在遥测帧数据前面,此时间码在地面综合处理软件显示。[0054](四)时间稳定度计算[0055]时间稳定度采用最值差值法进行计算,即通过比较它们差值的绝对值与平均值的大小来判断其稳定性。[0056]1)计算出星时ts与基带时间tg的差值序列{tn},n=0,1,2,…;[0057]tn=ts-tg…………(1)[0058]其中,ts为星时,tg为基带遥测封装时间;[0059]2)求出差值序列的平均值μ:[0060][0061]3)求出差值序列{tn}的标准差:[0062][0063](五)稳定度计算[0064]1)短期时间稳定度计算[0065]航天器时间和地面时间差值计算,to至to+20min时间段的短期稳定度,根据公式(3)进行计算,其中,n=1200;[0066]20min时间稳定度的计算结果如图3所示。[0067]2)长期时间稳定度计算[0068]航天器时间和地面时间差值计算,to至to+24h时间段的长期稳定度,根据公式(3)进行计算,其中,n=86400;[0069]24h时间稳定度的计算结果如图4所示。[0070]本发明提供了综合电子分系统时间基准稳定度测试方法,使用户能够方便快捷地建立和修改规则,按照此方法能够对综合电子分系统时间基准稳定度进行测量和计算,并对计算结果进行分析和判定。[0071]根据本发明提供的航天器时间基准稳定度测量系统,包括:模块m1:通过地面天线、上下变频器、测控基带建立星地测控链路,并通过接收软件、解析软件和显示软件进行数据接收、处理和显示;模块m2:进行地面时间基准设置;模块m3:进行地面时间码选择,将测控基带的时间码与星上遥测进行组遥测帧,遥测帧中的航天器时间码与测控基带时间码进行对应;模块m4:通过比较遥测帧同步脉冲时间码与卫星时间码差值的绝对值与平均值的大小来计算时间稳定度。[0072]进行测控基带时间基准参考设置,在测控基带软件中将时间基准设置为外参考,将测控基带的时间输入硬件接口接时间服务器,将测控10mhz外参考连接铷钟,将时间服务器10mhz外参考连接铷钟。在地面测控基带设备完成遥测帧同步的同时输出帧同步脉冲,并将基带设备遥测帧同步脉冲锁存的时间封装在遥测帧数据前面,将对应时间码显示在地面综合处理软件中。采用最值插值法进行预设长期稳定度和预设短期稳定度计算。时间稳定度计算包括:计算出星时ts与基带时间tg的差值序列{tn},n=0,1,2,…;tn=ts-tg…………(1);求出差值序列的平均值μ:求出差值序列{tn}的标准差:[0073]本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统、装置及其各个模块以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统、装置及其各个模块以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同程序。所以,本发明提供的系统、装置及其各个模块可以被认为是一种硬件部件,而对其内包括的用于实现各种程序的模块也可以视为硬件部件内的结构;也可以将用于实现各种功能的模块视为既可以是实现方法的软件程序又可以是硬件部件内的结构。[0074]以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
本文地址:https://www.jishuxx.com/zhuanli/20240730/150557.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
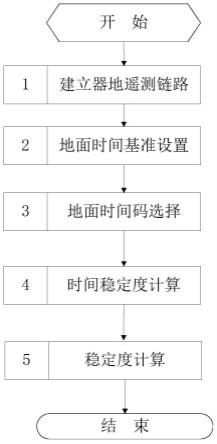
一种计时钟表的制作方法
下一篇
返回列表