一种适用于狭长区域的三维位移监测系统及方法与流程
- 国知局
- 2024-07-30 11:01:46
本发明属于三维位移监测,具体为一种适用于狭长区域的三维位移监测系统及方法。
背景技术:
1、在道路施工、矿山开采以及开渠施工等场景中,在地理条件的限制下易产生狭长区域,狭长区域的空间结构存在顶部沉降和两侧向内坍塌变形的可能性,为确保施工安全和通行安全,针对狭长区域内存在变形坍塌风险的部位,可在狭长区域的稳定部位设置全自动水准仪,并在风险部位的空间轮廓面上选取适宜的检测点并在各个监测点上均设置小棱镜,利用自动水准仪监测小棱镜的位置变化即可起到对狭长区域的空间结构进行变形监测的效果。
2、然而,在利用自动水准仪和若干小棱镜组成的三维监测系统对狭长区域进行监测时,存在一下问题:一方面,狭长区域内空间小,发生扬尘后粉尘密度大,为确保自动水准仪的测量精度,监测范围需限制在百米范围内,另一方面,监测过程中,全自动水准仪需要对小棱镜逐个进行位置检测,此过程中全自动水准仪需要频繁地往复调节,耗时长且全全自动水准仪运行负担大,针对上述问题,本发明提供一种适用于狭长区域的三维位移监测系统及方法。
技术实现思路
1、本发明的目的是针对背景技术的问题,提供一种适用于狭长区域的三维位移监测系统及方法。
2、本发明通过以下技术方案来实现上述目的:
3、一种适用于狭长区域的三维位移监测系统,包括监控中心,还包括uwb基站和设置在狭长区域的空间轮廓面上的uwb定位网,uwb基站搭载在设置于狭长区域的侧壁上的平移机构上,且狭长区域的侧壁上设有全自动水准仪,平移机构上设有隔离罩且隔离罩内设有与uwb基站对位的棱镜,平移机构用于搭载uwb基站沿狭长区域的侧壁滑动,uwb基站在滑动过程中接收uwb定位网的信号,全自动水准仪配合棱镜用于在uwb基站的滑动过程中对uwb基站进行跟踪定位,uwb基站和全自动水准仪与监控中心进行实时数据传输,隔离罩用于隔离全自动水准仪和棱镜配合形成的检测空间。
4、作为本发明的进一步优化方案,uwb定位网中包括若干个沿狭长区域的路径均匀分布的定位模块,每个定位模块中均包括一个位于狭长区域最高点处的uwb标签和若干个设置于其他位置的uwb标签,且每个定位模块中所有的uwb标签均位于同一狭长区域横截面上。
5、作为本发明的进一步优化方案,平移机构包括设于狭长区域的侧壁上的滑轨、滑台以及驱动滑台沿滑轨往复移动的驱动组件,uwb基站设置在滑台上,驱动组件有两个并分别设置在滑轨的两端,驱动组件包括箱体,箱体内转动安装有若干个绕卷架且绕卷架上缠绕设置有拉绳,拉绳的自由端固定在滑台上,单个箱体内的所有绕卷架在箱体外的驱动件和箱体内的齿轮组的配合驱动下同步转动。
6、作为本发明的进一步优化方案,滑台的外侧转动安装有滚轮。
7、作为本发明的进一步优化方案,隔离罩包括设置在滑台上的移动罩、包围在全自动水准仪外侧的固定罩以及设置在移动罩和固定罩之间并固定在驱动组件上的定位套,定位套和移动罩之间设有伸缩罩,棱镜设置在移动罩内。
8、一种适用于狭长区域的三维位移监测方法,具体步骤如下:
9、s1、获取uwb基站和uwb标签的初始坐标;
10、s2、监测过程中对uwb基站和uwb标签的位置规律性地进行多次检测,每次检测均获取一次uwb基站和uwb标签实时坐标;
11、s3、获取实时坐标后,对比uwb基站的初始坐标和uwb基站的实时坐标获取修正数据,通过修正数据测算平移机构的变位幅度和变位速率;
12、s4、利用修正数据对uwb标签实时坐标进行修正处理,将修正后的uwb标签实时坐标与uwb标签初始坐标对比可测算uwb标签的变位幅度和变位速率;
13、s5、当uwb基站或uwb标签的变位幅度或变位速率超出监控中心设定的报警值时,监控中心显示报警信号。
14、作为本发明的进一步优化方案,步骤s1和s2中,获取uwb基站和uwb标签的初始坐标和实时坐标的具体步骤为:开启平移机构、使uwb基站在监测范围内往复运动一个来回,在uwb基站远离全自动水准仪的过程中,全自动水准仪通过追踪棱镜对uwb基站进行实时定位,监控中心从全自动水准仪输出的数据中获取uwb基站的系列坐标数据,与此同时,监控中心从uwb基站输出的数据中获取多个时间点上的uwb基站对应的uwb标签的坐标数据。
15、作为本发明的进一步优化方案,获取的uwb基站的初始坐标记录为t0(a0、a1、a2、a3...),其中,a0、a1、a2、a3...为不同时间点上的uwb基站的坐标,相邻两个时间点之间的时间间隔相等,且时间点的个数与uwb定位网中定位模块的个数相等并一一对应,获取的uwb标签的初始坐标记录为【(t0、a0)、(b1、b2、b3...)】、【(t0、a1)、(b1、b2、b3...)】......,步骤s2中,获取的uwb基站的实时坐标记录为tx(a0、a1、a2、a3...),获取的uwb标签的实时坐标记录为【(tx、a0)、(b1、b2、b3...)】、【(tx、a1)、(b1、b2、b3...)】......。
16、本发明的有益效果在于:
17、1、该用于狭长区域的三维位移监测系统及方法,通过全自动水准仪、平移机构、uwb基站以及uwb标签的配合,实现了利用全自动水准仪对uwb基站进行实时绝对定位,并同时利用uwb基站对uwb标签进行相对定位的效果,实现了监测uwb基站和uwb标签相对于初始位置的位移情况,从而反映uwb基站和uwb标签所在部位的狭长区域空间变形情况的效果。
18、2、采用该三维位移监测系统及方法进行狭长区域的位移变形监测时,全自动水准仪只需对和uwb基站存在对位关系的棱镜进行追踪定位,对全自动水准仪的调节频率、调节范围及数据分析的要求大大降低,监测系统运行更高效且稳定。
19、3、通过移动罩、固定罩、定位套以及伸缩罩的配合,实现了利用隔离罩包围全自动水准仪和棱镜配合形成的定位检测空间的效果,且隔离范围可随棱镜的移动而自动调整,有效避免了粉尘对全自动水准仪的检测精度的干扰,从而扩大了检测范围,可实现百米以上的范围内的监测,使用范围更广。
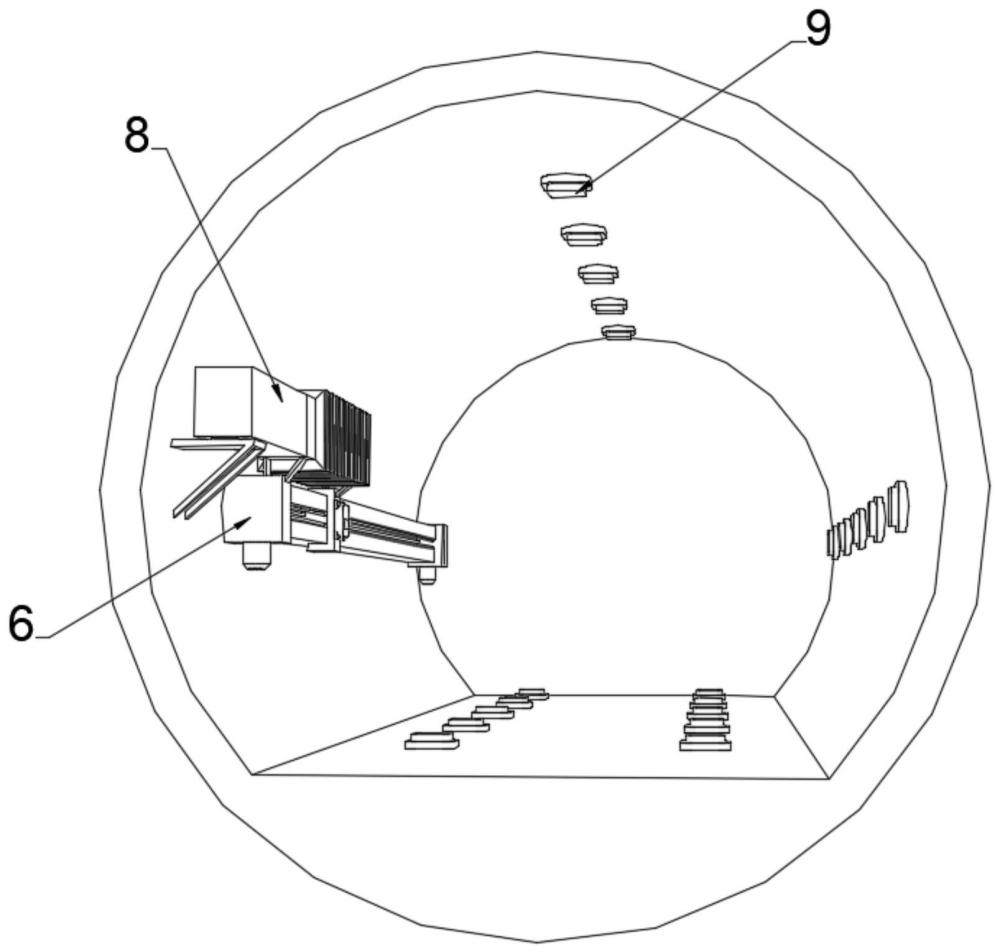
技术特征:1.一种适用于狭长区域的三维位移监测系统,包括监控中心,其特征在于,还包括uwb基站(3)和设置在狭长区域的空间轮廓面上的uwb定位网,所述uwb基站(3)搭载在设置于狭长区域的侧壁上的平移机构上,且狭长区域的侧壁上设有全自动水准仪(5),所述平移机构上设有隔离罩(8)且隔离罩(8)内设有与uwb基站(3)对位的棱镜(4),所述平移机构用于搭载uwb基站(3)沿狭长区域的侧壁滑动,所述uwb基站(3)在滑动过程中接收uwb定位网的信号,所述全自动水准仪(5)配合棱镜(4)用于在uwb基站(3)的滑动过程中对uwb基站(3)进行跟踪定位,所述uwb基站(3)和全自动水准仪(5)与监控中心进行实时数据传输,所述隔离罩(8)用于隔离全自动水准仪(5)和棱镜(4)配合形成的检测空间。
2.根据权利要求1所述的一种适用于狭长区域的三维位移监测系统,其特征在于,所述uwb定位网中包括若干个沿狭长区域的路径均匀分布的定位模块,每个所述定位模块中均包括一个位于狭长区域最高点处的uwb标签(9)和若干个设置于其他位置的uwb标签(9),且每个定位模块中所有的uwb标签(9)均位于同一狭长区域横截面上。
3.根据权利要求2所述的一种适用于狭长区域的三维位移监测系统,其特征在于,所述平移机构包括设于狭长区域的侧壁上的滑轨(1)、滑台(2)以及驱动滑台(2)沿滑轨(1)往复移动的驱动组件(6),所述uwb基站(3)设置在滑台(2)上,所述驱动组件(6)有两个并分别设置在滑轨(1)的两端;
4.根据权利要求3所述的一种适用于狭长区域的三维位移监测系统,其特征在于,所述滑台(2)的外侧转动安装有滚轮(10)。
5.根据权利要求3所述的一种适用于狭长区域的三维位移监测系统,其特征在于,所述隔离罩(8)包括设置在滑台(2)上的移动罩(801)、包围在全自动水准仪(5)外侧的固定罩(802)以及设置在移动罩(801)和固定罩(802)之间并固定在驱动组件(6)上的定位套(803),所述定位套(803)和移动罩(801)之间设有伸缩罩(804),所述棱镜(4)设置在移动罩(801)内。
6.一种适用于狭长区域的三维位移监测方法,基于权利要求2-5任一项所述的适用于狭长区域的三维位移监测系统,其特征在于,具体步骤如下:
7.根据权利要求6所述的一种适用于狭长区域的三维位移监测方法,其特征在于,所述步骤s1和s2中,获取uwb基站(3)和uwb标签(9)的初始坐标和实时坐标的具体步骤为:开启平移机构、使uwb基站(3)在监测范围内往复运动一个来回,在uwb基站(3)远离全自动水准仪(5)的过程中,全自动水准仪(5)通过追踪棱镜(4)对uwb基站(3)进行实时定位,监控中心从全自动水准仪(5)输出的数据中获取uwb基站(3)的系列坐标数据,与此同时,监控中心从uwb基站(3)输出的数据中获取多个时间点上的uwb基站(3)对应的uwb标签(9)的坐标数据。
8.根据权利要求6所述的一种适用于狭长区域的三维位移监测方法,其特征在于,所述步骤s1中,获取的uwb基站(3)的初始坐标记录为t0(a0、a1、a2、a3...),其中,a0、a1、a2、a3...为不同时间点上的uwb基站(3)的坐标,相邻两个时间点之间的时间间隔相等,且时间点的个数与uwb定位网中定位模块的个数相等并一一对应,获取的uwb标签(9)的初始坐标记录为【(t0、a0)、(b1、b2、b3...)】、【(t0、a1)、(b1、b2、b3...)】......,所述步骤s2中,获取的uwb基站(3)的实时坐标记录为tx(a0、a1、a2、a3...),获取的uwb标签(9)的实时坐标记录为【(tx、a0)、(b1、b2、b3...)】、【(tx、a1)、(b1、b2、b3...)】......。
技术总结本发明涉及一种适用于狭长区域的三维位移监测系统及方法,涉及三维位移监测技术领域,包括监控中心,还包括UWB基站和设置在狭长区域的空间轮廓面上的UWB定位网,UWB基站搭载在设置于狭长区域的侧壁上的平移机构上,且狭长区域的侧壁上设有全自动水准仪,平移机构上设有隔离罩且隔离罩内设有与UWB基站对位的棱镜,平移机构用于搭载UWB基站沿狭长区域的侧壁滑动,UWB基站在滑动过程中接收UWB定位网的信号,全自动水准仪配合棱镜用于在UWB基站的滑动过程中对UWB基站进行跟踪定位。该三维位移监测系统及方法实现了在无尘条件下对UWB基站的绝对位移进行实时监测的效果,又以UWB基站为基准实现了监测UWB标签的位移的效果,综合实现了对狭长区域内多个部位进行位移变形监测的效果。技术研发人员:王天漪受保护的技术使用者:合肥物尔物测量技术有限公司技术研发日:技术公布日:2024/7/25本文地址:https://www.jishuxx.com/zhuanli/20240730/155125.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表