一种基于计算机视觉技术的桥梁结构位移影响线实测方法
- 国知局
- 2024-07-30 11:04:19
本发明属于桥梁结构检测,具体涉及一种基于计算机视觉技术的桥梁结构位移影响线实测方法。
背景技术:
1、中国专利公开了一种基于计算机视觉技术的桥梁结构位移影响线实测方法(cn109580137b),其在视频数据以及图像处理中使用光流算法;但是光流算法在噪声较大的图像中,光流的准确性会降低,光流算法仅适用于小的特征点,对于大面积的运动或变形不够准确,另外光流算法对光照变化敏感,导致跟踪失败;因此,其容易受到天气条件(如雨、雾、光照变化)的影响,致测量质量下降,影响数据处理的准确性,一旦数据处理不准确准,就不能准确地识别和跟踪桥梁结构中的关键特征点,位移测量的精度也就无法保证。
2、另外,传统的位移影响线实测方法需要通过静载试验或标定车辆匀速过桥的方式获取,这些方法可能会影响桥梁结构的日常运营,试验成本高、工作效率低。
技术实现思路
1、为了实现以上目的,本技术实现要素:采用如下技术方案:
2、本发明的目的在于提供一种基于计算机视觉技术的桥梁结构位移影响线实测方法,用于解决现有技术中特征点的识别和跟踪不准确的问题。
3、一种基于计算机视觉技术的桥梁结构位移影响线实测方法:
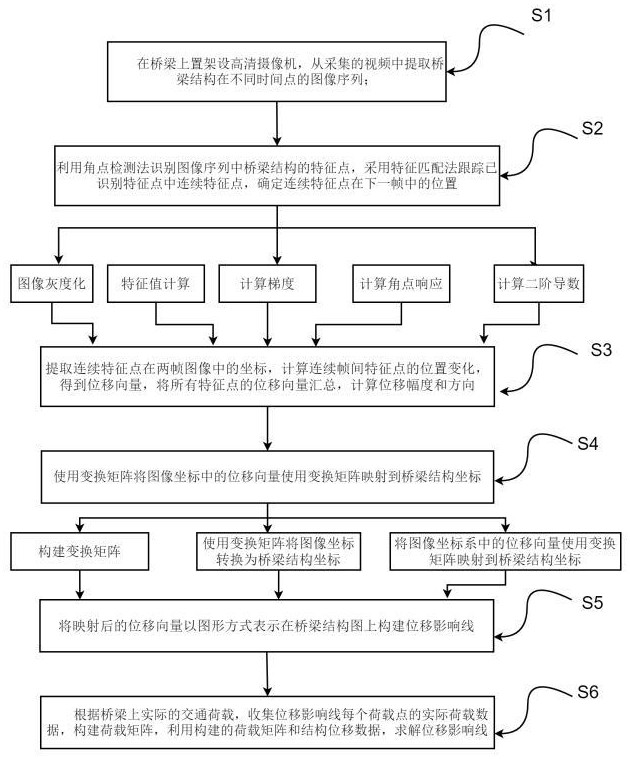
4、 s1.在桥梁的关键位置架设高清摄像机,从采集的视频中提取桥梁结构在不同时间点的图像序列;
5、 s2.利用角点检测法识别图像序列中桥梁结构的特征点,采用特征匹配法跟踪已识别特征点中连续特征点,确定连续特征点在下一帧中的位置;
6、 s3.提取连续特征点在两帧图像中的坐标,计算连续帧间特征点的位置变化,得到位移向量,将所有特征点的位移向量汇总,计算位移幅度和方向;
7、 s4.使用变换矩阵将图像坐标中的位移向量使用变换矩阵映射到桥梁结构坐标;
8、 s5.将映射后的位移向量以图形方式表示在桥梁的结构图上构建位移影响线;
9、 s6.根据桥梁上实际的交通荷载,收集步骤s5中构建的位移影响线上的每个荷载点的实际荷载数据,构建荷载矩阵,利用构建的荷载矩阵和结构位移数据,求解位移影响线。
10、所述步骤2中,利用角点检测法识别图像序列中桥梁结构的特征点的方法:
11、步骤21.图像灰度化,将彩色视频帧转换为灰度图像,因为灰度图像减少了处理的复杂性,同时保留了必要的亮度信息;
12、图像灰度化是将rgb彩色图像转换为灰度值来实现,公式如下:
13、;
14、 是灰度图像,,, 分别是红色、绿色和蓝色通道的强度值,
15、步骤22.计算梯度,对灰度图像中每个像素点计算和方向的一阶导数(梯度),得到图像的梯度图像,梯度反映了图像亮度变化的幅度和方向,是角点检测的基础,
16、计算灰度图像中每个像素点和方向的一阶导数:
17、 ;
18、 ;
19、其中,是图像亮度函数,和分别是沿和方向的梯度。
20、步骤23.计算二阶导数,对梯度图像计算二阶导数,得到图像的矩阵;
21、对步骤22中的梯度图像再次求导,得到二阶导数:
22、;
23、用得到的二阶导数构建矩阵,构建的二阶矩阵为:
24、 ;
25、步骤24.特征值计算,矩阵的特征值反映了图像在特定点的局部几何结构,对每个像素点的矩阵计算特征值:
26、;
27、其中,是特征值,和是对应的特征向量。
28、步骤25.使用公式计算角点响应:
29、;
30、其中,,是每个像素点矩阵的特征值,是经验常数,通常取0.04。
31、步骤2中,采用特征匹配法跟踪已识别的连续特征点的方法,使用特征匹配法来匹配上一帧的特征点描述符与当前帧的特征点描述符,通过比较所有可能的描述符找到最佳匹配,匹配得分通过计算描述符之间的距离来确定,描述符之间的距离使用欧氏距离距离确定,确定公式为:
32、;
33、其中,和是两个特征点的描述符,是描述符的长度。
34、步骤3.对于匹配的特征点,提取其在两帧图像中的坐标,计算连续帧间特征点的位置变化,得到位移向量,将所有特征点的位移向量汇总,计算位移幅度和方向;
35、首先,提取匹配的特征点在两帧图像中的坐标,记第一帧中的特征点坐标为,记第二帧中的特征点坐标为,
36、计算连续帧间特征点的位置变化,得到位移向量:
37、;
38、其中,是沿轴的位移,是沿轴的位移;
39、其次,汇总所有特征点的位移向量,得到位移向量集合,
40、;
41、对每个特征点进行分析,计算其位移幅度和位移方向,
42、;
43、;
44、 和分别是位移向量在轴和轴上的分量,是一个考虑了象限的反正切函数,确保方向的正确性。
45、步骤4.将图像坐标中的位移向量使用变换矩阵映射到桥梁结构坐标,
46、使用变换矩阵将图像坐标转换为桥梁结构坐标,将图像坐标中的位移向量使用变换矩阵映射到桥梁结构坐标,转换后的位移向量用于表示桥梁结构上的实际位移,直接用于桥梁的结构分析和监测;
47、变换矩阵结合了旋转、缩放和平移操作;
48、旋转矩阵表示为:
49、;
50、公式中,为旋转角度,表示位移向量需要旋转多少度以对齐到桥梁结构坐标系,旋转矩阵用于调整位移向量的方向,使其与桥梁坐标系的方向一致,
51、缩放矩阵为:
52、;
53、 和分别表示沿轴和轴的缩放因子,和分别用于调整位移向量的横向和纵向大小,使之与桥梁的实际尺寸成比例,
54、平移向量为:,和分别表示沿轴和轴的平移距离,用于将位移向量从图像坐标系的原点移动到桥梁结构坐标系的相应位置,
55、变换矩阵:
56、;
57、经过变换矩阵转化后的位移向量:
58、;
59、应用变换矩阵到原始位移向量上,完成从图像坐标到桥梁结构坐标的转换。
60、步骤5.构建位移影响线,将映射后的位移向量以图形方式表示在桥梁的结构图上,生成一个可视化的图形,以直观展示桥梁结构在荷载作用下的位移情况,绘制箭头表示每个特征点的位移,箭头的起点是特征点的位置,箭头的长度和方向分别表示位移的大小和方向。
61、步骤6.荷载矩阵的构建以及位移影响线的求解,根据桥梁上实际的交通荷载,收集步骤s5中构建的位移影响线上的每个荷载点的实际荷载数据,构建荷载矩阵,利用构建的荷载矩阵和结构位移数据,通过线性回归方法求解位移影响线,建立荷载与位移之间的关系模型,预测在不同荷载条件下桥梁的位移响应,为桥梁的设计、维护和安全评估提供了科学依据,
62、 步骤6中,荷载矩阵 :
63、;
64、 是荷载点的数量,是观测点的数量,表示第个i荷载点对第个观测点的影响;
65、通过线性回归方法,求解荷载矩阵与经过变换矩阵转化后的位移向量集合之间的关系,求解得到的位移影响线可以用于桥梁的结构分析和监测,帮助工程师评估桥梁的健康状态和安全性,求解荷载矩阵与经过变换矩阵转化后的位移向量集合之间的关系的公式为:
66、;
67、 是经过变换矩阵转化后的位移向量集合,包含了所有观测点的位移向量;是荷载向量,表示桥梁上的荷载情况;
68、 ,是第个荷载点的荷载大小,荷载向量是通过最小二乘法或其他线性回归技术来求解的,
69、求解方法为,找到最佳的荷载向量,使得与之间的误差最小,求解公式为:
70、;
71、公式中,是的逆矩阵,是的转置矩阵。
72、通过构建荷载矩阵和位移影响线的求解,能更直接地支持结构损伤定位和损伤程度的量化分析。
73、综上所述,由于采用了上述技术方案,发明内容的有益技术效果是:
74、一种基于计算机视觉技术的桥梁结构位移影响线实测方法利用角点检测法和特征匹配法,自动化地从视频中提取和跟踪桥梁结构的特征点,减少了人为误差,提高了精度;
75、一种基于计算机视觉技术的桥梁结构位移影响线实测方法通过计算连续帧间特征点的位置变化,得到位移向量,并汇总所有特征点的位移向量,实现了对桥梁位移的精确测量;
76、一种基于计算机视觉技术的桥梁结构位移影响线实测方法使用变换矩阵将图像坐标系中的位移向量转换为桥梁结构坐标系,确保了数据的准确性和实用性。
77、一种基于计算机视觉技术的桥梁结构位移影响线实测方法通过构建荷载矩阵和求解位移影响线,建立了荷载与位移之间的关系模型,为桥梁的结构分析和监测提供了科学依据。
78、通过以上方法一种基于计算机视觉技术的桥梁结构位移影响线实测方法通过自动化的方法减少了数据处理的复杂性,提高了数据处理的效率;相比传统的传感器部署,具有更低的成本和更高的可扩展性,同时准确的位移监测和荷载分析有助于及时发现桥梁结构的潜在问题,提高了桥梁的安全管理水平。
79、应用前景方面:
80、一种基于计算机视觉技术的桥梁结构位移影响线实测方法为桥梁的定期检查和维护提供了一种高效、精确的方法;其次,通过对桥梁位移的实时监测,可以及时发现异常变化,预警可能的灾害;最后,通过位移数据和荷载分析可以为桥梁设计提供重要的参考数据,帮助优化桥梁结构。
本文地址:https://www.jishuxx.com/zhuanli/20240730/155345.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。