海用LFMCW雷达测速精度提升方法与流程
- 国知局
- 2024-07-30 11:13:00
本发明属于雷达系统领域,特别涉及一种线性调频连续波lfmcw海用雷达测速方法,可用于提升海用lfmcw雷达测速精度。
背景技术:
1、随着空间电磁环境的日趋复杂,海用雷达面临着既要提高对目标距离、速度及方位等的探测能力,同时又要降低被发现的概率以及提高抗干扰的性能。海用lfmcw雷达测速精度受制于目标形状、大小、速度、距离及海情等多种因素。
2、现有的海用lfmcw雷达测速方法,包括以下两种:
3、一是对雷达中频回波信号,通过模数转换adc采样、数字下变频处理、低通滤波处理、快速傅里叶变换fft处理、动目标显示mti等处理后,在动目标检测mtd处理中实现。
4、二是对雷达中频回波信号,通过a/d采样、数字下变频处理、低通滤波处理、fft处理、mti处理、mtd处理、恒虚警处理及动态杂波图处理后,在雷达终端显示处理模块中实现。
5、上述这两种海用lfmcw雷达测速方法均能够较好的完成中频回波信号的实时处理,但是在复杂海况条件下,无法达到相应的探测精度。
6、针对上述问题,近年来,相关资料和技术文献中提出了一些海用lfmcw雷达测速方法,但这些方法中大多数采用以上两种方法的进一步细化处理,没有对系统集成提升海用lfmcw雷达测速方法进行全面的阐述。如2023年在无线电工程上的论文《强杂波背景下fmcw雷达低小慢目标探测研究》提出了通过选取适当的雷达参数,并通过动目标显示/自适应动目标显示处理、反异步处理、恒虚警及动态杂波图等信号处理算法的相互组合使用,进一步提高了强杂波背景下近距离低小慢目标的探测能力。但该方法只是从雷达信号处理领域对海上目标的探测精度进行提升,没有从测速误差和信号处理的整体进行分析,因而,就不能全面准确的提升海用lfmcw雷达的测速性能。
技术实现思路
1、本发明的目的在于针对上述现有技术的不足,提出一种海用lfmcw雷达测速精度提升方法,通过对海用lfmcw雷达的热噪声误差、相位噪声误差、信号频率源误差、adc采样处理及mtd处理的系统分析,实现对海用lfmcw雷达测速精度的提升。
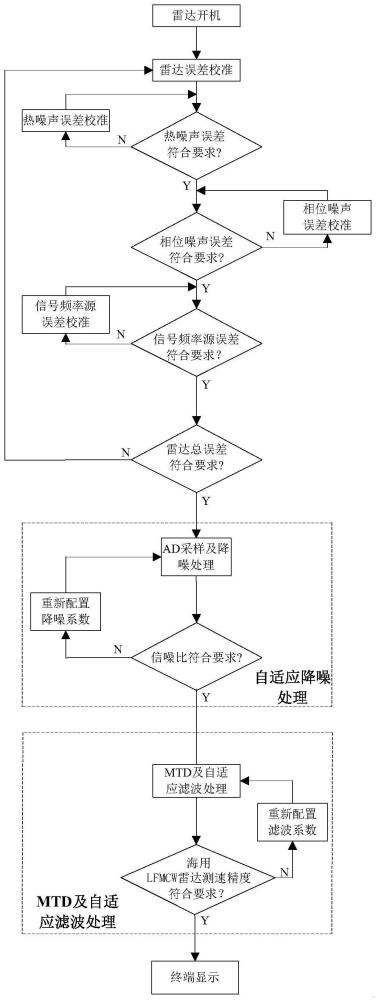
2、为实现上述目的,本发明的实现步骤包括如下:
3、(1)对lfmcw雷达的热噪声误差进行校准。
4、雷达开机,开始线性调频连续波lfmcw雷达的热噪声误差校准,即计算海用lfmcw雷达的热噪声误差δ1,判断其是否符合系统的热噪声评估值要求np;
5、若δ1≥np,则提高接收机输出中频信噪比和环路鉴别器的误差斜率,重新计算δ1,直至δ1小于系统的热噪声评估值np;
6、若δ1<np,则执行步骤(2)。
7、(2)对lfmcw雷达的相位噪声误差进行校准。
8、计算lfmcw雷达相位噪声误差δ2,判断其是否符合系统的相位噪声评估值lp:
9、若δ2≥lp,分别提高环路鉴别器的误差斜率和接收机杂波干扰信号与中频信号之比,重新计算δ2,直至δ2小于系统的相位噪声评估值lp;
10、若δ2<lp,则执行步骤(3)。
11、(3)对lfmcw雷达信号的频率源误差进行校准。
12、计算lfmcw雷达信号频率源误差δ3,判断其是否符合系统的雷达信号频率源误差评估值fp:
13、若δ3≥fp,则更换频综组件,即更换相参信号的频率,重新计算δ3,直至δ3小于系统的相位噪声评估值fp;
14、若δ3<fp,则执行步骤(4)。
15、(4)对lfmcw雷达信号的总误差进行校准。
16、计算lfmcw雷达测速总误差δ,判断其是否符合系统的雷达测速误差评估值vp:
17、若δ>vp,则重复步骤(1)~步骤(4),直至δ小于等于系统的雷达测速误差评估值vp;
18、若δ≤vp则执行步骤(5)。
19、(5)对lfmcw雷达信号进行自适应降噪处理。
20、对符合雷达测速误差评估值vp的雷达测速信号进行adc采样及降噪处理,并判断其是否符合系统的信噪比门限mp:
21、若adc采样及降噪处理后的多路数字差分信号均小于系统设计的信噪比门限mp,则配置降噪系数,重新进行adc采样及降噪处理,直至多路数字差分信号其中之一大于等于系统的信噪比门限mp;
22、若adc采样及降噪处理后的多路数字差分信号其中之一大于等于系统的信噪比门限mp,则执行步骤(6);
23、(6)对lfmcw雷达信号进行动目标检测mtd及自适应滤波处理。
24、对满足系统信噪比门限mp的雷达测速信号进行动目标检测mtd及自适应滤波处理,判断其测速精度δv是否符合技术要求规定的雷达测速精度q:
25、若δv≤δv,则配置滤波系数进行mtd及自适应滤波处理,重新计算测速精度δv,直至δv不低于技术要求规定的雷达测速精度值q;
26、若δv>δv,则进行终端显示。
27、本发明与现有技术相比具有如下优点:
28、1.本发明在复杂海况条件下,通过对海用lfmcw雷达的热噪声误差校准、相位噪声误差校准、信号频率源误差校准、adc采样及降噪处理和mtd及自适应滤波处理,实现了对海用lfmcw雷达测速精度的提升。
29、2.本发明在船只大转弯和急转弯等条件下,通过对海用lfmcw雷达的热噪声误差校准、相位噪声误差校准、信号频率源误差校准、adc采样及降噪处理和mtd及自适应滤波处理,实现了对海用lfmcw雷达测速精度的提升。
30、实验表明,本发明通过误差校准、adc采样及降噪处理和mtd及自适应滤波处理,能够提升复杂海况条件下、船只大转弯及急转弯等条件下海用lfmcw雷达的测速精度。
技术特征:1.一种海用lfmcw雷达测速精度提升方法,其特征在于,包括如下:
2.根据权利要求1所述的方法,其特征在于,所述步骤(1)中计算海用lfmcw雷达的热噪声误差δ1,公式如下:
3.根据权利要求1所述的方法,其特征在于,所述步骤(1)中系统的热噪声评估值np,是对一段时间内计算的lfmcw雷达热噪声误差δ1累加求平均后,再乘以一个固定的比列因子得到。
4.根据权利要求1所述的方法,其特征在于,所述步骤(2)中计算lfmcw雷达相位噪声误差δ2,公式如下:
5.根据权利要求1所述的方法,其特征在于,所述步骤(2)中系统的相位噪声评估值np,是对一段时间内计算的lfmcw雷达相位噪声误差δ2累加求平均后,再乘以一个固定的比列因子得到。
6.根据权利要求1所述的方法,其特征在于,所述步骤(3)中计算lfmcw雷达信号频率源误差δ3,公式如下:
7.根据权利要求1所述的方法,其特征在于,所述步骤(4)中计算lfmcw雷达总误差δ,公式如下:
8.根据权利要求1所述的方法,其特征在于:
9.根据权利要求1所述的方法,其特征在于:
10.根据权利要求1所述的方法,其特征在于,步骤(6)进行动目标检测mtd及自适应滤波处理,具体实现如下:
技术总结本发明公开了一种海用LFMCW雷达测速精度提升方法,主要解决现有技术在复杂海况条件下,探测海上动目标测速精度无法保证的问题。其实现方案是:通过校准海用LFMCW雷达的热噪声误差、相位噪声误差、信号频率源误差及总误差,使海用LFMCW雷达的总误差符合要求;通过对海用LFMCW雷达AD采样后的多路数字差分信号进行自适应降噪处理,提高多路数字差分信号的信噪比;通过对海用LFMCW雷达信号进行动目标检测MTD及自适应滤波处理,实现对目标回波时间预估积累处理。本发明具有回波信号信噪比高,目标检测的虚警概率和误警概率低的优点,可用于在复杂海洋环境下提升LFMCW雷达对动目标的测速精度。技术研发人员:薛卫东,陈华,杨晓妮,王文军受保护的技术使用者:陕西长岭电子科技有限责任公司技术研发日:技术公布日:2024/7/25本文地址:https://www.jishuxx.com/zhuanli/20240730/155806.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表