一种基于自主导航运输小车系统的控制方法及其小车与流程
- 国知局
- 2024-07-30 11:14:24
本发明涉及自主导航系统领域,尤其涉及一种基于自主导航运输小车系统的控制方法及其小车。
背景技术:
1、自主导航运输小车是一种高度智能化的物流装备,它融合了先进的传感器技术、自主导航与定位系统、路径规划算法、智能控制系统以及无线通信模块,能够在无人干预的情况下,精准、高效地完成各类货物的室内或室外自主运输任务,这类小车通过激光雷达、摄像头、超声波传感器等多元感知设备实时捕捉周围环境信息,借助slam、gps、磁导航等方式实现精确定位与地图构建,中央处理单元基于环境感知数据进行实时决策,运用优化算法规划最优路径,并通过先进的避障策略确保在复杂环境中安全行驶。
2、此外,自主导航运输小车还具备自动装卸功能,能够与仓储系统无缝对接,执行从入库、存储到出库的全程自动化物料流转,凭借24小时不间断工作、高精度导航、灵活调度与高效运行等优势,自主导航运输小车极大地提升了物流效率,降低了人力成本,已成为现代制造业、仓储物流、医疗保健等领域实现智慧化升级的重要工具。
3、现有的自主导航系统在控制运输小车进行运输时,在周围环境特征发生变化后,如果地图未及时更新,可能会导致基于地图的定位算法精度下降,从而产生定位误差而导致导航偏差。
4、因此,有必要提供一种新的基于自主导航运输小车系统的控制方法及其小车解决上述技术问题。
技术实现思路
1、为解决上述技术问题,本发明提供一种基于自主导航运输小车系统的控制方法及其小车。
2、本发明提供的基于自主导航运输小车系统的控制方法所述控制方法包括通过处理模块用于对数据测量模块检测的数据进行预处理,得到数据集,根据数据集建立地图模型并训练,并将后续数据测量模块检测得到的数据带入至地图模型内进行提取,提取环境特征,将提取到的环境特征与地图模型内的环境特征进行匹配对比,同时对地图模型内不同的环境特征进行替换,实时更新和优化地图模型;
3、其中优化和更新地图模型的具体步骤如下:
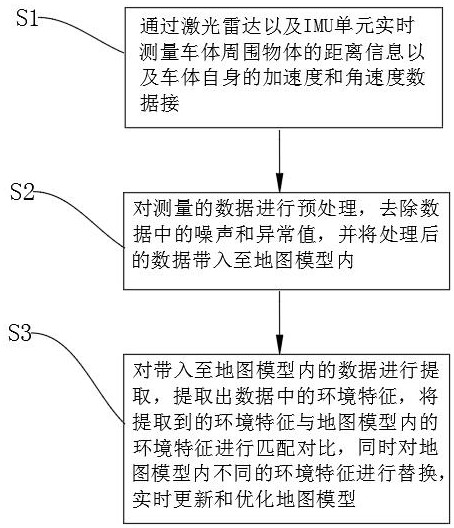
4、s1:通过激光雷达以及imu单元实时测量车体周围物体的距离信息以及车体自身的加速度和角速度数据;
5、s2:对测量的数据进行预处理,去除数据中的噪声和异常值,并将处理后的数据带入至地图模型内;
6、s3:对带入至地图模型内的数据进行提取,提取出数据中的环境特征,将提取到的环境特征与地图模型内的环境特征进行匹配对比,同时对地图模型内不同的环境特征进行替换,实时更新和优化地图模型;
7、imu单元包括加速度计以及陀螺仪,其中加速度计通过内部设置的压电晶体以及电容式传感器感应到内部质量块因加速而产生的位移和压力变化,并将这些物理信号转化为电信号,进而转换为具体的加速度数值,具体的计算公式为。
8、优选的,环境特征匹配对比的具体步骤如下:
9、对分析提取到的环境特征与地图模型内已记录的环境特征进行匹配对比;
10、当二者环境特征高度匹配时,得知车体回到已知路线,依据新数据对地图模型内原有的环境特征进行微调;
11、在车体沿原路线返回起点或经过已检测过的区域时,对环境特征匹配对比成功识别出闭环情况,同时利用已记录的信息对累计的定位误差进行校正。
12、优选的,处理模块中包括预处理模块,通过预处理模块对激光雷达以及imu单元检测到的数据进行处理。
13、优选的,激光雷达与imu单元之间连接有时间同步模块,时间同步模块用于确保激光雷达与imu单元之间的同步检测和数据传输。
14、优选的,所述激光雷达通过tof法测量与物体之间的距离,测量公式为。
15、本发明另一方面提供的一种小车,包括车体,所述车体外侧设有防护外壳,所述防护外壳顶部设有用于上料的夹取设备,所述车体顶部设有用于放置物料的放置槽以及防护盖,所述防护外壳顶部设有用于安装防护盖的安装槽,所述防护盖通过多个翻转组件与安装槽内侧相连接;
16、所述翻转组件包括安装块、连接块以及连接板,所述安装块顶部与防护外壳内侧固定连接,所述连接块顶部与防护盖底部固定连接,且所述连接块通过支撑柱与安装块转动连接,所述连接板一端与防护盖底部固定连接,所述连接板另一端与防护外壳内侧固定连接,所述防护盖底部设有转动柱,所述转动柱顶部贯穿至所述防护盖顶部,且所述转动柱底部固定设有卡板,所述车体前端设有自主导航系统;
17、自主导航系统包括数据测量模块以及控制器;
18、数据测量模块:包括激光雷达以及imu单元,其中激光雷达用于测量车体与周围多个物体之间的距离信息,imu单元于实时检测并记录车体自身的加速度以及角速度数据;
19、控制器:用于对车体进行路线规划并控制车体按照规划路线进行行驶。
20、优选的,所述夹取设备包括伸缩气缸、连接杆、两个夹板,所述伸缩气缸两侧固定设有支撑板,所述支撑板分别通过多个连杆一以及连杆二与所述夹板相连接,且所述连杆一通过转动杆与所述连接杆一侧转动连接,所述连接杆另一侧与伸缩气缸输出端固定连接。
21、与相关技术相比较,本发明提供的基于自主导航运输小车系统的控制方法及其小车具有如下有益效果:
22、本发明通过对实时获取的环境特征与预存地图模型中对应特征进行精确比对,在二者的环境特征匹配度高度一致时,判断车体已重新进入已知行驶路径,此时只需运用新采集的数据,对地图模型中原有的环境特征进行细微更新与优化,保持与实际情况的精准吻合,同时在车辆沿原路线返回或进入已检测过的区域时,通过对环境特征进行匹配对比,准确识别出闭环情况,利用已记录的数据对累计的定位误差进行校正,不断提升导航定位的精度与可靠性。
23、本发明通过处理模块可以对地图模型实时进行优化和更新,在检测到新的环境特征或现有环境特征发生变化时,可以及时对不同的环境特征进行替换,确保地图模型始终反应最新的环境状态,同时在长时间运行过程中,车体可以持续使用环境变化,无需频繁更新地图,实现长期自主导航。
24、本发明通过不断与新测量数据进行比对和修正,可以减少定位和地图构建过程中的累积误差,同时根据处理模块训练后的地图模型,提取新的环境特征与模型内的已有特征进行匹配对比,有助于车体在已知环境中实现精准定位,提高车体定位的稳定性和准确性。
25、本发明通过实时监测车体与周围物体的距离信息以及车体自身的加速度和角速度数据,可以为车体及时提供周边环境态势感知,有助于车体快速响应突发情况,提高行驶过程中的安全性。
技术特征:1.一种基于自主导航运输小车系统的控制方法,其特征在于,所述控制方法包括通过处理模块用于对数据测量模块检测的数据进行预处理,得到数据集,根据数据集建立地图模型并训练,并将后续数据测量模块检测得到的数据带入至地图模型内进行提取,提取环境特征,将提取到的环境特征与地图模型内的环境特征进行匹配对比,同时对地图模型内不同的环境特征进行替换,实时更新和优化地图模型;
2.根据权利要求1的基于自主导航运输小车系统的控制方法,其特征在于,环境特征匹配对比的具体步骤如下:
3.根据权利要求1的基于自主导航运输小车系统的控制方法,其特征在于,处理模块中包括预处理模块,通过预处理模块对激光雷达以及imu单元检测到的数据进行处理。
4.根据权利要求1的基于自主导航运输小车系统的控制方法,其特征在于,激光雷达与imu单元之间连接有时间同步模块,时间同步模块用于确保激光雷达与imu单元之间的同步检测和数据传输。
5.根据权利要求1的基于自主导航运输小车系统的控制方法,其特征在于,激光雷达通过tof法测量与物体之间的距离,测量公式为d。
6.一种小车,其特征在于,包括车体(1),所述车体(1)外侧设有防护外壳(2),所述防护外壳(2)顶部设有用于上料的夹取设备(3),所述车体(1)顶部设有用于放置物料的放置槽(4)以及防护盖(5),所述防护外壳(2)顶部设有用于安装防护盖(5)的安装槽,所述防护盖(5)通过多个翻转组件与安装槽内侧相连接;
7.根据权利要求6所述的小车,其特征在于,所述车体(1)底部设有麦克纳姆轮(12)。
8.根据权利要求6所述的小车,其特征在于,所述防护外壳(2)顶部还设有用于驱动夹取设备(3)的转动部件(13)。
9.根据权利要求6所述的小车,其特征在于,所述防护盖(5)表面设有方便握持的通槽(19)。
10.根据权利要求6所述的小车,其特征在于,所述夹取设备(3)包括伸缩气缸(21)、连接杆(23)、两个夹板(27),所述伸缩气缸(21)两侧固定设有支撑板(22),所述支撑板(22)分别通过多个连杆一(24)以及连杆二(25)与所述夹板(27)相连接,且所述连杆一(24)通过转动杆(26)与所述连接杆(23)一侧转动连接,所述连接杆(23)另一侧与伸缩气缸(21)输出端固定连接。
技术总结本发明提供一种基于自主导航运输小车系统的控制方法及其小车,涉及自主导航系统领域,基于自主导航运输小车系统的控制方法及其小车所述控制方法包括通过处理模块用于对数据测量模块检测的数据进行预处理,得到数据集,根据数据集建立地图模型并训练,并将后续数据测量模块检测得到的数据带入至地图模型内进行提取,提取环境特征,将提取到的环境特征与地图模型内的环境特征进行匹配对比,同时对地图模型内不同的环境特征进行替换,实时更新和优化地图模型,本发明通过利用已记录的数据对累计的定位误差进行校正,不断提升导航定位的精度与可靠性。技术研发人员:王波,肖锋,胡海强,马新伟,王洪达,王珍,韩玮,郑雪阳,范志钦受保护的技术使用者:中建材智能自动化研究院有限公司技术研发日:技术公布日:2024/7/25本文地址:https://www.jishuxx.com/zhuanli/20240730/155937.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。