一种面向甲烷点源星上自主识别与探测的双载荷装置的制作方法
- 国知局
- 2024-07-30 11:17:51
本发明涉及甲烷卫星监测领域,特别是涉及一种面向甲烷点源星上自主识别与探测的双载荷装置。
背景技术:
1、甲烷是一种强大的温室气体,其排放将导致生态环境的恶劣。卫星监测是监测甲烷排放的一种有效手段。
2、生态环境部发布的《生态环境卫星中长期发展规划》文件,鼓励发展商业模式小卫星星座,实现监测范围从重点区域向全国拓展,监测频次由年、季向月、周、日提升,全面提升生态环境领域卫星监测能力。
3、近年来,商业小卫星逐渐发展,许多公司或者地方政府开始筹划发展自主卫星或卫星星座。与大卫星相比,小卫星具有体积小、造价相对更低、研制周期短等特征。而由于成本控制、体积控制和重量控制,小卫星在传感器性能、存储、计算能力等多方面有一定限制,其寿命也相对较短。因此,小卫星技术更加注重高效、灵活、轻量化、星座组合和高度集成化技术。
4、而对于甲烷监测来说,传统的卫星探测任务规划主要依靠地面管控实现,在地面确定探测区域、协调资源等,生成探测任务指令,上注到星上。而这种传统方式对于星地之间的传输较为依赖,缺乏自主性和灵活性,难以满足日渐发展的智能化需求。
技术实现思路
1、本发明要解决的技术问题是提供一种面向甲烷点源星上自主识别与探测的双载荷装置,使其可以在星上有效地自主识别甲烷排放源并能顺利完成探测任务,以提升卫星探测并高精度反演甲烷源强的能力,从而克服现有的技术中自主性和灵活性差的问题。
2、为解决上述技术问题,本发明采用如下技术方案:
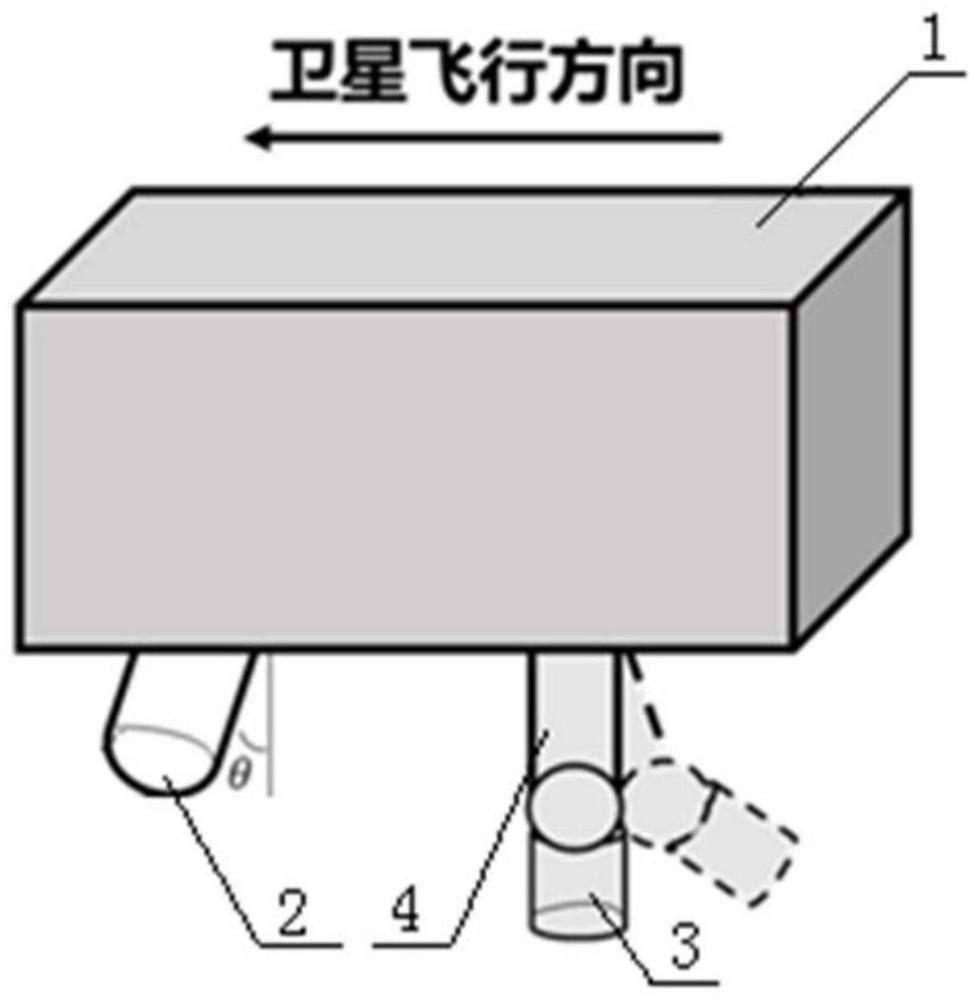
3、一种面向甲烷点源星上自主识别与探测的双载荷装置,包括用于搭载在卫星平台上的载荷主体;沿卫星的飞行方向,所述载荷主体底部前后位置分别安装有甲烷源识别传感器及甲烷浓度探测传感器,所述甲烷源识别传感器具有前倾角,所述甲烷浓度探测传感器通过具备伸展和角度转换的摆臂结构与载荷主体相连;
4、所述甲烷源识别传感器具有双探测通道,所述双探测通道为甲烷强吸收波段和弱吸收波段的两个光谱通道;
5、所述载荷主体包括星务计算机模块,所述星务计算机模块用于获取甲烷源识别传感器的探测数据,并通过比值阈值法识别甲烷可疑排放源以及确定甲烷可疑排放源的坐标信息,再根据甲烷可疑排放源的坐标信息生成摆臂结构的姿态调整指令,及调整完成后生成给甲烷浓度探测传感器的探测指令;
6、所述甲烷浓度探测传感器为高光谱传感器,用于根据探测指令,开启目标探测模式,对甲烷可疑排放源进行连续成像,探测高精度的甲烷柱浓度产品。
7、作为本发明进一步地改进,所述甲烷强吸收波段和弱吸收波段的两个光谱通道的中心波长分别为3.31μm和1.65μm。
8、进一步地,所述甲烷浓度探测传感器的中心波长为1.64μm,带宽为35nm,光谱分辨率为0.125nm,信噪比设定为不低于250db。
9、进一步地,还包括卫星平台,所述载荷主体搭载在卫星平台上。
10、进一步地,所述获取甲烷源识别传感器的探测数据,并通过比值阈值法识别甲烷可疑排放源以及确定甲烷可疑排放源的坐标信息包括:
11、获取甲烷源识别传感器的双探测通道的探测数据,计算双探测通道之间的比值,如强吸收波段/弱吸收波段大于阈值1,则认为该点为甲烷可疑排放源,相应地,在探测数据中逐像元遍历,查找值的高值分布区域,记录高值分布的中心位置作为甲烷可疑排放源的坐标信息。
12、进一步地,在获取甲烷源识别传感器的探测数据前,还包括云判别算法,在云量较高的地区和时间,甲烷源识别传感器不进行数据采集。
13、进一步地,当甲烷可疑排放源较密集出现时,甲烷源识别传感器识别到多个甲烷可疑排放源,按阈值由大到小进行排序,利用排序序列开始距离聚类计算,然后再按卫星过境先后顺序判断甲烷浓度探测传感器是否能按顺序完成相邻两个探测区域的转换,如能则按卫星过境的先后顺序进行探测,如果不能则舍弃阈值相对较小探测区域。
14、进一步地,当甲烷源识别传感器识别到多个甲烷可疑排放源后,具体包括:
15、1)利用甲烷源识别传感器所识别的甲烷可疑排放源信息,形成类似于[lon1,lat1,thre1]的数据序列,包括甲烷可疑排放源的经度l on、纬度l at和计算的阈值thre,利用阈值进行排序,阈值由大到小排序生成一个有序数列xarry1,结构为[id1,lon1,l at1,thre1];
16、2)利用排序序列开始距离聚类计算,计算id1的附近点位能与id1组成一个点群set1,被甲烷浓度探测传感器探测范围对应的最小外接矩形包含,这个点群的最小外接矩形rectang l e1信息包括矩形四个角点和一个中心点坐标;
17、3)在除去set1中点数据外的有序数列xarry2中,选取阈值最大的点位,重复2)的计算,得到set2和另一个最小外接矩形rectang l e2,直至所有甲烷可疑排放源都归到了一个set序列和一个最小外接矩形中;
18、4)以最小外接矩形为单位,以矩形中心点信息为基础按卫星过境顺序排序,计算第一个外接矩形和其最近相邻外接矩形的距离d和机动时间t,如果t小于距离d/卫星运行速度v,则说明在此时间内不能完成两个探测区域的转换,需舍弃set序列中阈值thre相对较小的那个,如果可以则说明两个区域均可探测;
19、5)重复4)的操作,直至得到一组确定的目标探测矩形序列,该矩形序列的中心点信息用于后续生成摆臂结构的姿态调整指令。
20、进一步地,所述摆臂结构的姿态调整指令包含目标指向模式和复位模式,所述目标指向模式为接收到坐标信息后,根据卫星运行速度v,目标坐标loc,卫星运行航向角度ρ,卫星轨道高度h信息计算摆臂结构的摆角和姿态调整时间;公式表示为(t,β1,β2)=f(v,loc,ρ,h),t为姿态调整为β1的时间,β1为前摆角信息,β2为后摆角信息,摆臂结构根据计算结果将甲烷浓度探测传感器的镜头从垂直于星下的原位状态调整至目标指向状态;复位模式为摆臂结构将甲烷浓度探测传感器的镜头调整到β2,此时,采集结束实行复位,等待下一次调整指令。
21、进一步地,所述根据探测指令,开启目标探测模式包括:当摆臂结构将甲烷浓度探测传感器的镜头调整到β1时开启甲烷浓度探测传感器镜头,开始采集数据,在摆臂结构将甲烷浓度探测传感器的镜头调整到β2时甲烷浓度探测传感器镜头关闭,等待下一次开启。
22、通过采用上述技术方案,本发明至少具有如下有益效果:
23、1.本发明提出了一种双传感器的载荷设计,包含甲烷源识别传感器及甲烷浓度探测传感器,其中甲烷源识别传感器在光谱分辨率上较粗,包含两个甲烷敏感波段,可以快速通过比值阈值法筛选出甲烷可疑排放源;甲烷浓度探测传感器是甲烷高光谱传感器,可以满足高精度反演甲烷的要求;同时甲烷源识别传感器的前倾角设置及甲烷浓度探测传感器的摆臂结构设置,能满足卫星过境转换目标模式时的时间需求,能顺利完成探测任务,可以提升卫星探测并高精度反演甲烷源强的能力。
24、2.本发明基于单星多手段协同的自主目标探测,可以有效提升卫星资源的利用率,增加甲烷排放源探测数量,对未知源进行智能识别,丰富现有的甲烷排放源清单。
25、3.本发明针对甲烷可疑排放源较密集出现的情况,提出了一种考虑多种因素的优化的算法,可以保证最大程度地获取甲烷可疑排放源的信息。
本文地址:https://www.jishuxx.com/zhuanli/20240730/156112.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表