一种无人机雷场目标定位方法
- 国知局
- 2024-07-30 11:21:36
背景技术:
1、雷场目标是指存在于作为战场阵地前沿遗留的雷场里的地雷、子弹、炮弹和手榴弹等爆炸物。雷场目标探测是根据雷场目标特征,将其于周围物体中分辨的过程,可以分为外弹道学特征、物理性质特征,化学性质特征等。雷达探测技术出现在二十世纪六十年代,电磁波在传播过程中,在介质交界处会产生电磁波反射现象,因此可利用地下介质的不连续性来探测地下目标。在最初出现时,表面穿透雷达(surface penetrating radar,spr)与探地雷达(ground penetrating radar,gpr),仅能探测疑似目标的有无,随着技术逐渐成熟,spr与gpr也可以进一步实现疑似目标的成像与定位。
2、随着无人机的飞速发展,无人机作为探测系统载体的优势也逐渐体现,无人机制造成本低,维护成本更低,在数量和灵活性上占据优势;有人机飞行高度高、天线作用距离远,无人机可以在更低的高度飞行,降低了由于飞行高度造成的信号衰减,可以以更小的发射功率探测更深的目标;无人机可以以更低速飞行,有利于实现合成孔径雷达 (syntheticaperture radar,sar);当使用合成孔径时,无人机的天线长度更小,能获得更好的极限分辨率。无人机同样可以参与后期排除工作,有实现探测排除功能一体化的潜力。典型的雷场目标探测系统以地面拖拽式系统为主,而相关机载探测系统的研究,尤其是针对低空,小微型无人机的探测系统研究在国内处于起步阶段。
3、以无人机作为平台具有大量优势,但小微型无人机、尤其是旋翼无人机受限于机体结构,搭载探地雷达时,往往只能将天线固定安装在主体上,并处于下视工作,在使用雷达进行下视探测时虽然有利于在复杂地形下发现埋藏的雷场目标,但无人机雷达天线尺寸小、波束宽,距离地面远,信号测绘带宽度大,波束中心入射角度接近垂直,这种工况对大部分sar系统、与gpr系统都是较为恶劣的。因此对下视sar系统,尤其是低空小微型无人机sar进行的研究也并不充分。
4、传统的合成孔径雷达,通过将天线沿着一条长线阵的轨迹等速移动并发射相干信号。利用雷达与地面目标的相对运动即“多普勒效应”,对于sar来说,多普勒频率是通过雷达的线性移动来获得的,而不是像静止雷达那样通过波束旋转来获得的。无人机雷达采用平板天线,不能进行波束扫描,只能得到场景的二维图像,其中二维图像x轴平行于雷达波束指向,y轴为航向,称为sar的斜距-方位图像。
5、由于无人机雷达工作于下视,飞行航迹左右两侧斜距相同的目标具有一致的斜距-多普勒特性,在斜距-方位图像上重合,无法在后续处理中分辨具体目标的地理坐标位置,必须分析等时延平面,解除高度-地距的耦合关系。
6、为了获取第三维分辨能力,干涉sar、线性阵列sar、曲线sar等新方法被提出。然而,干涉sar不具备第三维分辨能力,并且从理论上不能提供精确的三维重建,获得的高度信息也仍存在于斜距-方位图像平面上,而不是地理坐标系上。线阵sar在跨航向维的分辨率与线阵长度密切相关,同时阵元间距必须小于 1/2 波长以防止栅瓣,是成本高、复杂度高的大型阵列,难以用于较小的平台。曲线sar具有跨航向的分辨能力,由于飞行轨迹不断变化,其在斜距方向的运动使得斜距也是不断变化的,对飞行姿态和定位精度有较高的要求。
7、无人机高度较低,无法应用平面波假设,不满足等效相位中心的条件,无法应用线阵sar方法;同时,平面波假设失效后,由于天线波束与地面之间的倾角不再恒定,造成地理坐标单元的分辨率发生变化,不再可以应用常规的投影方法获得地面坐标,干涉sar效果较差;无人机航线受地表环境影响较多,难以适用三维耦合的曲线sar。因此,考虑雷场地下目标稀疏分布的特点、以及探雷任务成本、效率、规模的需求,发展合成孔径雷达中rd算法的两步独立处理与雷达三维测绘理论,提出toa定位技术与sar技术结合2d+1d两步独立定位的定位方法。
技术实现思路
1、为更好适应探雷任务的需求,提出sar技术与toa定位技术结合的定位方法,在无人机雷场探测中具有更好的效能。本发明采取如下技术方案:
2、无人机雷场目标探测中的目标定位过程包括以下步骤:
3、(1)建立三维地理坐标系,在雷场区域内选择若干道平行航线。控制主机控制各分机执行系统初始化以及时间同步;各分机沿航线进行同步探测,获取自发自收、以及各分机左右相邻分机乒乓收发的回波数据。
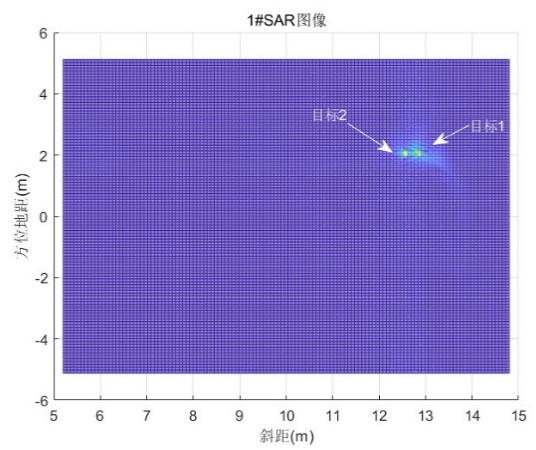
4、(2)对所得回波数据进行背景杂波分离等预处理后,对该组回波数据进行sar成像处理,对不同距离门构造不同的增益系数以平衡合成孔径尺寸随距离缩减带来的目标幅度衰减。获得sar图像、,目标在该图像坐标系内表现为sinc函数。
5、(3)按照方位向分辨率单元对、图像内的目标点进行分割搜索,沿斜距方向对、内的目标进行匹配,获得目标的像素坐标、……等斜距。
6、(4)根据步骤(3)中,在各个sar图像中匹配的目标点,根据距离历史关系,计算其存在的自收发回波时延与乒乓收发时延:
7、
8、
9、式中,、prf为距离向采样频率,为图像坐标, 为图像起始的偏移。计算目标与分机的距离。单基距离与双基距离和。
10、(5)依据步骤(4)所得2组距离与,双基距离和。、以及sar系统限制参数,计算目标在地理坐标系内的距离地距-高度的2维坐标,根据几何关系,目标坐标满足以下方程组:
11、
12、虽然目标位置看起来是欠定的,但在零多普勒面上,由于天线照射范围和波束宽度的限制,该约束条件对目标的跨航向地距坐标做出了约束,该方程组将满足额外的条件:对第i#与i+1#分机,有约束条件如下:
13、
14、由于无人机天线具有指向性,信号被限制在两台分机的俯仰向天线波束内,因此对俯仰角有约束条件如下:
15、
16、利用这种限制,排除潜在的位置解,得到目标在该平面上的跨航向-高度二维坐标,实现第一步的2d定位。
17、(6)根据步骤(3)中取得的3幅图像中的方位分辨信息,计算得到目标的方位坐标。实现第二步的1d定位。
18、本发明的有益效果是:(1)本发明公开了一种用于无人机的雷场目标三维定位方法,通过单基sar与双基sar同步成像,计算目标点在各个图像中的距离历史,计算目标点三维位置坐标。本发明的方法利用合成孔径获得精确的目标方位向信息,并在方位平面上进行有限制的toa定位。定位过程只需要用到2架无人机的sar数据,简化了系统组成,并解决了无人机雷达在工作在下视的目标分辨与目标高度信息问题。
技术特征:1.一种用于无人机雷场目标探测中的目标定位方法,其特征在于,包含以下步骤:
技术总结本发明公开了一种用于无人机雷场目标探测中的目标定位方法,包括以下步骤:(1)获取两道平行航迹的雷达回波数据,根据雷达回波数据,进行SAR成像处理,获得目标的SAR图像;(2)根据SAR成像结果获取目标在斜距平面的斜距‑方位坐标;(3)根据目标斜距信息,在地距‑高度平面内实现目标二维坐标的估计(4)根据SAR取得的方位信息,获得目标的三维坐标。由此,通过SAR成像技术与TOA技术相结合,可以实现在更小编队下的三坐标定位,应用范围广。技术研发人员:张一涵,黄采伦,唐博受保护的技术使用者:湖南科技大学技术研发日:技术公布日:2024/7/25本文地址:https://www.jishuxx.com/zhuanli/20240730/156361.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表