用于确定电极复合堆叠的角部区域的位置的方法与流程
- 国知局
- 2024-07-30 11:25:44
本发明涉及一种用于确定电极复合堆叠的角部区域的位置的方法。本发明还涉及一种用于执行所述方法的计算机程序。
背景技术:
1、在制造也称为esv(电极-隔膜复合物)的电极复合堆叠时,以交替的顺序堆叠阳极和阴极的电极片。在电极片之间分别存在隔膜层,所述隔膜层将电极彼此电绝缘。
2、电极片的搁放准确性是堆叠工艺的工艺性能的质量标准并且同时也是esv的与安全和功能相关的产品特征。目标是,所有的电极片以定义的距离以及在定义的公差范围内搁放。esv中的电极覆盖率越高,电化学性能就越高。在许多esv中,所述阳极的电极片环绕地(或者说在周向上)大出一至几毫米,以便确保对阴极的电极片的完整覆盖。阳极片的环绕的突出的边缘越小,堆叠的搁放将需要越精确地实现。但同时也应该提高制造速度,这与准确的搁放相反。由于此原因,需要可靠、快速并且同样精确地确定电极片的搁放准确性。
3、在现有技术中已知不同的确定搁放准确性的方法,其中,通常将x射线用于成像式的记录。然而,根据记录速度,由这种记录得到的3d图像数据通常具有较差的信噪比,因此通常由专业人员在成像软件中分析图像数据,以便确定相应的参数,例如电极片的角部的位置。
4、此外,在现有技术中可以确定电极片的扭转,因此尽管能够确定搁放准确性,但不一定能够推导出用于改善的搁放的校正措施。
技术实现思路
1、因此本发明所要解决的技术问题在于,提供一种方法,所述方法自动地、稳健地并且精确地确定esv中的电极片的角部区域的位置。
2、该技术问题按本发明通过用于确定多边形的电极片的角部在电极复合堆叠(或称为堆或堆垛)的至少一个角部区域中的位置的方法解决。本发明的有利的设计方案在以下描述。
3、按照本发明的用于确定各个单独的多边形的、尤其是矩形的电极片的至少一个角部区域在电极复合堆叠中的位置的方法、尤其是由计算机实施的方法包括步骤:
4、-借助成像方法、尤其是计算机断层扫描的成像方法在记录区域中以3d成像的方式记录(或者说拍摄)电极复合堆叠的电极片的角部区域,由此产生数据集,所述数据集包括电极复合堆叠的角部区域中的电极片相对于载体或者相对于布置在成像方法的记录区域中的标记的3d位置信息,
5、-由数据集确定每个电极片的围绕角部区域的棱边的第一和第二校正的棱边走向,其中,根据校正的棱边走向、例如通过将校正的棱边走向外推,确定相应的电极片的角部的位置,
6、-其中,首先至少通过以下步骤确定第一和第二棱边走向:
7、○产生多个xz剖切图像和yz剖切图像,
8、○在每个xz剖切图像和每个yz剖切图像中识别电极片,
9、○在每个xz剖切图像和每个yz剖切图像中并且对于每个在xz剖切图像和yz剖切图像中识别出的电极片,
10、■通过第一神经网络系统确定从电极复合堆叠中的参考位置区域直至电极片的电极棱边位置的电极片走向,
11、■调整电极片走向,使得参考位置的高度上的电极片走向从参考区域延伸至校正的电极棱边位置,其中,电极片走向的路径长度保持不变,
12、○分别确定直线,所述直线对于每个电极片沿着第一或第二棱边沿校正的电极棱边位置延伸,其中,所述直线相应于所述第一棱边走向和第二棱边走向。
13、第一卷积神经网络系统尤其是经训练的卷积神经网络系统,其配置用于识别电极片走向。
14、在德语使用中,将神经网络称为neuronales netz。卷积神经网络例如则相应于konvolutionalen neuronalen netz,但这在德语使用中不普遍。由于此原因,在本说明书中使用世界通用术语卷积神经网络convolutional neural network。
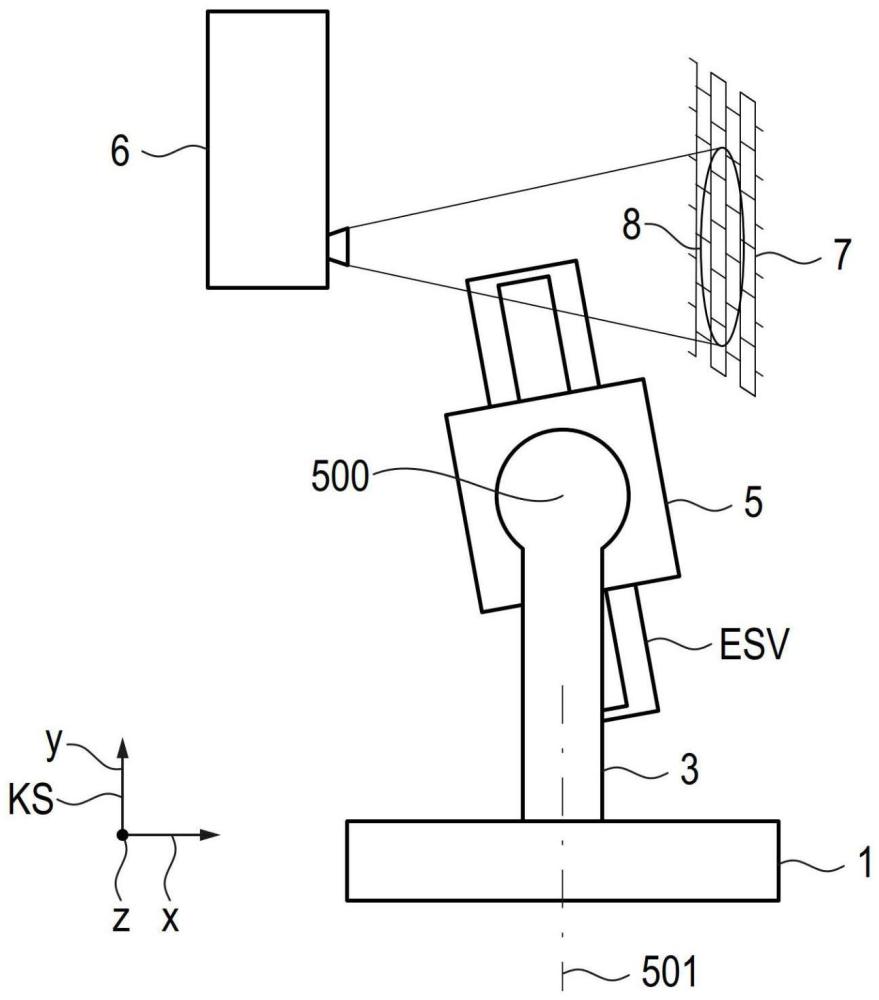
15、能够为数据集并且尤其为被记录的区域配置坐标系、例如笛卡尔坐标系;在此,轴优选这样定向,使得z轴垂直于电极片,并且x和y轴分别垂直于z轴。如果电极片是矩形的电极片,则x和y轴优选沿电极片的期望的棱边定向被定向。
16、坐标系优选与标记和/或与载体相关联,其中,y轴例如沿载体的第一延伸方向延伸,并且x轴沿载体的第二延伸方向延伸。
17、与之相关地需要说明的是,名称“xz剖切图像”以及“yz剖切图像”不是必须与笛卡尔坐标系相关地理解,而是首先用于在剖切图像之间实现术语上的区分。然而,xz剖切图像和yz剖切图像彼此不平行地延伸并且优选这样定向,使得剖切平面(沿着所述剖切平面产生剖切图像)大约或者准确地垂直于理想定向的电极片的第一或第二棱边走向地延伸。尤其如果载体反映沿着第一和第二棱边的电极片几何形状,则剖切图像也能够垂直于载体的第一和第二棱边地延伸。
18、为了更好的理解在此需要指出,术语“棱边走向”描述电极片的棱边的整体,而术语“电极棱边位置”相反地尤其表示电极棱边在剖切图像中的位置。对于每个电极片可以从剖切图像中的大量电极棱边位置中3d地确定电极片的棱边走向。
19、在此,电极棱边位置尤其相应于电极片的处于堆叠外部的棱边端部区段/电极片边缘的位置。
20、按照本发明的一种实施方式规定,通过确定多个支撑部位处的电极片位置来确定校正的电极棱边位置,其中,第一支撑部位相应于所述电极棱边位置,并且其中,电极片在电极复合堆叠中的参考位置通过至少一个其它的支撑部位获取(erfassen),其中,支撑部位通过第一卷积神经网络系统确定,其中,校正的电极棱边位置通过在参考位置的高度上移动至少一个第一支撑部位实现,其中,在第一支撑部位和至少一个其它的支撑部位之间的路径长度保持恒定,因此电极片走向的路径长度保持不变。
21、由每个剖切图像和电极片中的支撑部位可以确定路线,所述路线具有配属的路径长度。所述路径长度可以根据支撑部位彼此的距离确定。备选地可行的是,由通过支撑部位确定的路径(例如支撑部位的样条线段)确定所述路线的路径长度。
22、在确定校正的电极棱边位置时的重要方面为,所述电极片走向或者路线的路径长度保持恒定。由此实现了,校正的电极棱边位置不会包含电极片的镦压或者伸长。
23、尤其在每个剖切图像中并且对于每个电极片这样移动电极片的所有支撑部位,使得所述支撑部位在剖切图像中形成直线的路线,其中,将支撑部位移动到参考位置的高度上。由此确定棱边走向,所述棱边走向完全相应于在平面中延伸的电极片。堆叠中的一些电极片通常在棱边处扭曲或者弯折,这增加了确定角部区域位置的困难。将支撑部位移动到参考位置的高度消除了这个问题。
24、支撑部位的确定尤其用于确定剖切图像中的电极片走向,其中,在必要时,通过将剖切图像中的电极片走向“掰直”,实现了校正的棱边走向。
25、对于每个电极片,可以由校正的电极棱边位置确定校正的棱边走向。在电极片完全平坦地布置在堆叠中时,可以通过外推法或者其它适当的措施,由所述校正的电极棱边走向确定电极片的角部区域的位置或者角部的位置。只由所述信息可以可靠地推导出以上描述的质量和/或性能标准。
26、术语“神经网络系统”尤其并且优选地包括卷积神经网络系统并且由于此原因也称为cnn系统。
27、在本说明书的背景中,神经网络系统总是经训练的系统,所述系统根据相应地用标签标明的数据集被训练用于识别相应的特征或者将相应的特征分类。
28、相应的训练方法对于技术人员是已知的。
29、cnn系统尤其包括大量的神经网络、尤其是大量的卷积神经网络,其中,每个卷积神经网络被训练和设计用于特定的任务。
30、按照本发明的一种实施方式规定,每个xz剖切图像沿着平面平行错移地产生,所述平面包括电极复合堆叠的堆叠方向(z)和第一剖切方向(x),所述第一剖切方向垂直于通过载体和/或标记表示的第一棱边走向方向延伸,和/或其中,每个yz剖切图像沿着平面平行错移地产生,所述平面包括电极复合堆叠的堆叠方向(z)和第二剖切方向(y),所述第二剖切方向垂直于通过载体或者标记表示的第二棱边走向方向延伸。
31、按照本发明的另一个实施方式,规定以下步骤:
32、-对于每个电极片,通过从xz剖切图像中确定的校正的电极棱边位置确定第一直线,其中,第一直线相应于校正的第一棱边走向,
33、-对于每个电极片,通过从yz剖切图像中确定的校正的电极棱边位置确定第二直线,其中,第二直线相应于校正的第二棱边走向。
34、按照本发明的另一个实施方式规定,对于每个电极片确定第一和第二棱边走向的交点、尤其是其中,交点的确定包括相对于棱边走向沿堆叠方向的、即在一个平面上的投影的交点,其中,将相应的电极片的角部的位置配置给所述交点。
35、由于在电极片中,角部区域可能是倒圆的或者中断的,因此本实施方式可以用于非常准确地识别电极片角部的位置。
36、按照本发明的另一个实施方式规定,对于电极复合堆叠的电极片的两个或者更多的角部区域执行所述方法,并且由此确定电极片的两个或者更多的角部的位置。
37、角部区域可以在对电极复合堆叠进行单次记录期间并行地记录,或者可以通过对相应角部区域的不同记录串行(连续)地记录。
38、对多个角部区域并且因此对多个角部位置的记录和分析可以更精确地确定电极片在电极复合堆叠中的姿态。
39、尤其规定,确定电极片的以对角线方式相对置的两个角部区域的角部位置。这对于矩形的电极片几何形状特别有利。
40、按照本发明的另一个实施方式,xz剖切图像和yz剖切图像中的电极片通过用于识别电极片的其它的、例如第二个经训练的神经网络系统、尤其是卷积神经网络系统被识别,尤其是其中,在包括参考位置的电极复合堆叠的区域中识别电极片。
41、参考位置尤其位于堆叠的以下区域内,在该区域内堆叠被载体包围并且压紧,因此电极片的距离和定向基本上相同。在此,尤其沿剖切图像实现与载体平行的定向,因此电极片尤其彼此平行地并且水平地沿x或者y方向延伸。
42、所述第二cnn系统可以识别剖切图像中的各个单独的电极片,并且还可以例如以电极片编号的形式确定序列。由此能够确定电极片在堆叠中的相对位置。电极片可能在剖切图像中的灰度值上有所不同,尤其是电极片的灰度值在所述电极片的区域内变化,这取决于在所述电极片中的位置。
43、根据本实施方式的cnn系统能够与之无关地稳健而精确地识别电极片。
44、例如,第二cnn系统可以包括三个卷积神经网络(cnn),其中,第二cnn系统中的第一cnn(cnn3)设置用于在剖切图像中识别以下区域,在所述区域中,电极片在载体上部和载体下部之间延伸,其中,电极片在载体上部和载体下部之间被压紧。
45、该区域尤其包括参考位置并且尤其是指电极片之间没有间隙的区域。在本说明书的背景中,该区域也被称为参考位置区域。
46、例如,第二cnn系统中的第二cnn(cnn6)设置用于识别第一类型的电极片、如参考位置区域中的阳极,并且第二cnn系统中的第三cnn(cnn7)例如设置用于识别第二类型的电极片、如参考位置区域中的阴极。
47、尤其为多个cnn预设第一类型和第二类型的电极片的数量作为边界条件(或者已在训练数据集中隐含地创建),这提高了识别电极片时的稳健性。
48、以此方式能够根据第二cnn系统尤其按照类型地并且关于在所述参考位置区域中的堆叠顺序地识别电极片。
49、按照本发明的另一个实施方式规定,根据第一和第二校正的棱边走向和相应的电极片的至少一个角部的位置,确定相应的电极片相对于载体和/或标记的姿态。
50、尤其如果已知电极片的几何形状,则可以确定电极片的、对于技术人员也作为姿态已知的位置以及定向。因此例如可以确定电极片的所有角部的位置,其中,只对唯一的角部区域进行记录和分析。
51、按照本发明的另一个实施方式,根据所确定的、在本说明书的背景中也称为实际姿态的姿态,对于每个电极片确定与相对于载体和/或标记的预定义姿态、例如目标姿态的偏差,尤其是其中,通过关于瞬时极的说明来确定对于每个电极片的姿态偏差。
52、瞬时极可以通过电极片的旋转中心和旋转角度来描述姿态的偏差,尤其如果电极片的姿态偏差不只是直线的平移而且还包括旋转的话。利用瞬时极,只通过两个值(旋转中心和旋转角度)就能够完全地描述姿态的偏差。
53、例如,如果确定了姿态的系统偏差,偏差的确定就能够优化制造过程。
54、按照本发明的另一个实施方式,根据所确定的偏差,在用于其它电极复合堆叠的制造方法期间,调整电极片在电极复合堆叠上的搁放姿态,使得在其它电极复合堆叠中更少地产生偏差。
55、由此在制造过程中已经可以实现对电极片搁放的优化。
56、按照本发明的另一个实施方式规定,对于每个电极片,由角部的所确定的位置或者所确定的多个位置,确定相应的电极片的其余角部的尚未确定的位置,其中,由存储在数据库中的电极片尺寸实现对其余角部的确定。
57、根据这种实施方式,可以确定关于电极片的所有角部的姿态和几何形状以及位置的整体信息,这实现了所述方法的更高程度的稳健性和精确度。
58、按照本发明的另一个实施方式,所述多个电极片包括多个第一类型的电极片和多个第二类型的电极片。
59、第一类型的电极片如已经在之前的段落中说明的那样例如可以是阳极,并且第二类型的电极片例如可以是阴极。
60、按照本发明的另一个实施方式,第一类型的电极片具有比第二类型的电极片更大的面积,其中,第一类型和第二类型的电极片在电极复合堆叠中交替地堆叠放置,因此第一类型的电极片在电极复合堆叠中至少在一侧、尤其是在所有侧突伸出第二类型的电极片,尤其是其中,电极片同心地堆叠放置。
61、术语“同心”与之相关地是指,每个电极片的重心以理想方式位于平行于堆叠方向的同一轴线上,并且电极片具有相同的定向。
62、如已经在之前段落中所述的那样,在电极片之间布置有隔膜层。
63、尤其是,第一类型的电极片环绕地大出几微米或者几毫米,以便确保对第二类型的电极片的完整覆盖。第一类型的电极片尤其可能在环绕和突出的区域中偏离参考位置,例如弯折或者扭曲。对于这种突出的电极片,参考位置区域可以定义为以下区域,在所述区域中电极片没有突出,而是仍贴靠在所述第二类型的电极片上。在该区域内,电极片的平行度通常很高,因此该区域适合作为参考位置、尤其是参考高度,校正的电极片走向沿着所述参考位置延伸。
64、按照本发明的另一个实施方式,第一类型的电极片在剖切图像中具有与第二类型的电极片不同的灰度值范围,因此可以根据不同的灰度值范围在数据集中区分电极片。
65、剖切图像中的灰度值例如由电极片的吸收系数确定,尤其是计算机断层扫描成像方法的x射线范围内的吸收系数。
66、术语“灰度值”在此也包括剖切图像中的颜色、尤其是假色。因此,第一和第二类型的电极片在剖切图像中的颜色也可能有所不同。
67、按照本发明的另一个实施方式规定,在第一图像处理步骤中,用于识别电极片的暂时的电极棱边位置的经训练的第三神经网络系统在每个xz剖切图像和每个yz剖切图像中并且对于每个电极片暂时地确定电极片的电极片棱边位置,并且其中,还在每个xz剖切图像和每个yz剖切图像中对于每个电极片确定参考位置,其中,从电极复合堆叠的以下区域中确定参考位置,在所述区域中,电极片以规则的距离并且尤其是无间隙地沿着堆叠方向堆叠放置。
68、在电极复合堆叠具有第一和第二类型的电极片并且第一类型的电极片环绕地突伸出第二类型的电极片的情况下,以下cnn系统架构可能是有利的:
69、在这种情况下,第三cnn系统例如包括第一cnn(cnn2),该第一cnn被训练用于识别每个剖切图像中的电极复合堆叠的区域,该区域包括第二类型的电极片、即例如(较小的)阴极的电极棱边位置。
70、此外,第三cnn系统还包括第二cnn(cnn5),所述第二cnn被训练用于探测第二类型的电极片的电极棱边位置,其中,电极棱边位置在此只作为暂时的结果被处理,这用术语“暂时确定”表示。为了确保可靠的暂时确定,可以预设需要识别的电极棱边位置的数量(例如通过训练集或者通过附加的边界条件隐含地预设)。通过对用于识别电极棱边位置的范围的限制,实现提高的稳健性和可靠性。
71、第一类型的电极棱边位置以相同的方式方法被暂时确定。也就是说第三cnn系统还包括第三cnn(cnn1),所述第三cnn在每个剖切图像中确定包括第一类型的电极棱边位置的区域。然后,第四cnn(cnn4)在该区域中暂时地确定第一类型的电极片的电极棱边位置。
72、为了确保可靠的确定,可以预设需要识别的电极棱边位置的数量(例如通过训练集或者通过附加的边界条件隐含地预设)。通过对用于识别电极棱边位置的范围的限制,实现提高的稳健性和可靠性。
73、在由第三cnn系统和可能的第二cnn系统识别的这些特征(电极片类型、电极片在电极复合堆叠中的位置、参考位置区域、暂时的电极棱边位置)中,第一cnn系统可以例如确定第一支撑部位和可能的其它支撑部位,由此确定包括和连接所述支撑部位并且呈现剖切图像中的电极片走向的路线。在此,第一支撑部位尤其对应于(最终)电极棱边位置,即不再是暂时确定的棱边位置。
74、通过支撑部位对路线的创建同样可以借助cnn实现。
75、按照本发明的另一个实施方式,在第二图像处理步骤中,经训练的第一cnn系统在每个xz剖切图像和每个yz剖切图像中对于每个电极片确定多个支撑部位,其中,对第一类型的电极片和第二类型的电极片的确定分别限制在以下区域中,所述区域通过第一类型或者第二类型的电极片的暂时确定的最靠内、即朝电极复合堆叠的中心方向距电极棱边位置最远地设置的电极棱边位置和第一类型或者第二类型的电极片的暂时确定的最靠外、即与电极复合堆叠的中心距离最远地设置的电极棱边位置预设。
76、这种限制使得能够通过第一cnn系统可靠地确定支撑部位。
77、按照本发明的另一个实施方式,对于每个xz剖切图像和每个yz剖切图像并且对于每个电极片确定路线和配属于路线的路线长度,所述路线长度相应于多个支撑部位的路径长度,其中,对于每个xz剖切图像和每个yz剖切图像并且对于每个电极片,将所确定的支撑部位借助变换移动到垂直于电极复合堆叠的高度的直线路线上,即这样移动,使得路径长度保持恒定,由此将所述第一支撑部位的高度、尤其将相应剖切图像中的相应电极片的所有支撑部位的高度调节至参考位置。
78、按照本发明的另一个实施方式,载体在其角部处具有角部区域,其中,至少载体的角部区域具有与载体的中心区域相比更低的吸收系数,因此用于记录电极复合堆叠的成像方法的x射线被载体角部区域吸收的程度低于在载体中心区域中被吸收的程度。
79、载体的角部区域尤其与电极复合堆叠的角部区域相对应。
80、按照本发明的另一个方面,规定一种计算机程序,所述计算机程序包括计算机可读的计算机代码,当计算机代码在计算机上执行时,计算机代码执行按前述的实施方式之一所述的方法。
81、计算机程序可以作为计算机程序产品存储在计算机可读的、非临时的存储介质上。
82、按照本发明的另一个方面,规定一种用于电极复合堆叠的载体,该载体具有由载体棱边围成的中心区域,其中,该载体还具有位于其棱边的端部的多个角部区域,其中,与中心区域相比,该载体在角部区域中具有更低的吸收率,因此角部区域对x射线是透明的,尤其是吸收低于20%的射线,其中,所述中心区域对这种射线不是透明的,尤其是其中,中心区域吸收超过80%的射线。
83、载体的中心区域尤其具有精炼钢。
84、所述载体可以用作按照本发明的方法中的载体。
85、角部区域尤其是由吸收系数较低的材料制成。备选地,角部区域的厚度可以低于中心区域,因此更少地吸收。
86、按照载体的另一个实施方式,角部区域由铝、碳或者塑料制成,尤其是其中,塑料包含abs、pom。
87、尤其是在光子能量为10kev和300kev时,角部区域中的质量衰减系数在2.62和0.011m2/kg的范围内。
88、按照本发明的另一个实施方式,在光子能量为10kev和300kev时,角部区域中的质量衰减系数在23.7和0.011m2/kg的范围内。
89、记录区域尤其包括载体的一部分,因此载体可以用作参考系统,以便确定角部的位置或者电极片的姿态。
90、按照本发明的另一个实施方式,标记球以预先确定的三维布置方式布置在记录区域中,因此在每次记录中确定一个明确固定的坐标系,从而可以确定和说明关于该坐标系的角部位置或者电极片姿态。
本文地址:https://www.jishuxx.com/zhuanli/20240730/156674.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。