水下机器人囊体体积检测的方法及装置
- 国知局
- 2024-07-31 22:38:01
本发明涉及浮力调节,尤其涉及一种水下机器人囊体体积检测的方法、装置、电子设备、存储介质及计算机程序产品。
背景技术:
1、浮力调节是水下机器人的一种重要装置,其实现途径多种多样,但本质上都是改变指定装置的体积或密度。其中,基于油囊的方案原理明确、性能可靠,在仿生机器鱼、水下航行器、水下滑翔器中均有广泛应用。精确的浮力调节对水下机器人的能耗控制和姿态调整都有重要作用,但也需要精确地测量油囊体积的改变量。
2、计算油囊体积的方法有多种,如:在常规的油囊外部添加刚性封闭结构,形成封闭空间,同时安装温度传感器和气压传感器,通过温度和气压推算出油囊的体积;通过波纹管的收放以及外置的位置传感器测量油缸体积的改变值;浮力调节若使用油缸作为内部储油系统,配合位移传感器也可以精确计算油量。
3、水下机器人通常对续航能力有要求,而减小质量是一个必不可少的措施,因此理想的油囊需要按照舱内剩余空间做成薄薄的异形件,并且为了减重,一切附加的壳体都应尽量减去,而上述不同方式的缺点也暴露出来。基于温度和气压推算油囊体积的方案显然需要一个额外的壳体包裹油囊,或者在本就拥挤的舱内安装一个额外的专用密封舱,并且其空间不仅要满足油囊的起伏还要满足传感器的测量容忍范围,不利于质量的减小和空间利用。
4、基于波纹管和油缸的方案显然也分别有空间和重量上的劣势,因为波纹管的弯折程度有限,其结构导致了中心位置大块体积无法完全排空,因而不能充分利用其空间,而油缸及其附属机构由于密封的需求,其机构重量通常远超薄壁油囊。此外,在实践中,过紧的油缸密封显然会增加运动阻力,导致能耗上升,而不够紧的油缸密封会导致漏油,并且长期运行中,油缸活塞滑动处很难不缓慢漏油。不仅如此,由于波纹管和油缸通常为圆柱状,伸缩维度单一,其行程可能受到舱内空间的限制,不利于整体的空间利用率。基于此,提供一种新的油囊体积检测的方法成为业内亟待解决的问题。
技术实现思路
1、本发明提供一种水下机器人囊体体积检测的方法、装置、电子设备、存储介质及计算机程序产品,用以解决现有技术中油囊体积估计辅助装置重、空间利用率不足的缺陷。
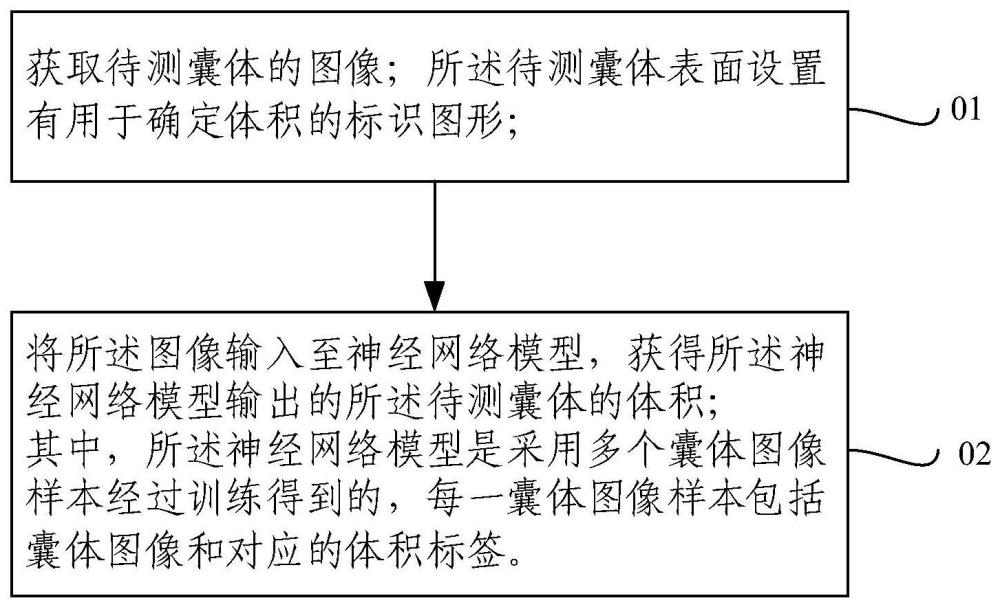
2、本发明提供一种水下机器人囊体体积检测的方法,包括:获取待测囊体的图像;所述待测囊体表面设置有用于确定体积的标识图形;将所述图像输入至神经网络模型,获得所述神经网络模型输出的所述待测囊体的体积;其中,所述神经网络模型是采用多个囊体图像样本经过训练得到的,每一囊体图像样本包括囊体图像和对应的体积标签。
3、根据本发明提供的水下机器人囊体体积检测的方法,所述将所述图像输入至神经网络模型,包括:将所述图像划分为多个子图像,将囊体变形明显的区域对应的子图像输入至所述神经网络模型。
4、根据本发明提供的水下机器人囊体体积检测的方法,所述将囊体变形明显的区域对应的子图像输入至所述神经网络模型,包括:对每个所述子图像进行编号;将囊体变形明显的区域对应的子图像,以及每一子图像的编号和坐标输入至所述神经网络模型。
5、根据本发明提供的水下机器人囊体体积检测的方法,所述方法还包括:根据人工经验确定所述囊体变形明显的区域;或者,通过仿真计算法确定所述囊体变形明显的区域。
6、根据本发明提供的水下机器人囊体体积检测的方法,所述方法还包括:获取多个囊体图像样本;每一囊体图像样本包括囊体图像和对应的体积标签;利用所述多个囊体图像样本对所述神经网络模型进行训练。
7、根据本发明提供的水下机器人囊体体积检测的方法,所述待测囊体的图像包括从多个角度采集的所述待测囊体的图像。
8、本发明还提供一种水下机器人囊体体积检测的装置,包括:获取模块,用于获取待测囊体的图像;所述待测囊体表面设置有用于确定体积的标识图形;输入模块,用于将所述图像输入至神经网络模型;获取模块,用于获得所述神经网络模型输出的所述待测囊体的体积;其中,所述神经网络模型是采用多个囊体图像样本经过训练得到的,每一囊体图像样本包括囊体图像和对应的体积标签。
9、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上所述的水下机器人囊体体积检测的方法。
10、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的水下机器人囊体体积检测的方法。
11、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上所述的水下机器人囊体体积检测的方法。
12、本发明提供的水下机器人囊体体积检测的方法,通过获取标识图形的图像,将该图像作为输入,采用神经网络模型,即可得到待测囊体的体积,不需囊体之外的壳体或结构,最大限度地减小了待测囊体的重量,该水下机器人囊体体积检测的方法,不受温度和压力的干扰,鲁棒性强、反馈及时;同时,采用此方法时,待测囊体可在多个维度自由伸缩,并且能够最大限度地充满或排空液体,有利于空间利用率,增大了浮力的调节范围。
技术特征:1.一种水下机器人囊体体积检测的方法,其特征在于,包括:
2.根据权利要求1所述的水下机器人囊体体积检测的方法,其特征在于,所述将所述图像输入至神经网络模型,包括:
3.根据权利要求2所述的水下机器人囊体体积检测的方法,其特征在于,所述将囊体变形明显的区域对应的子图像输入至所述神经网络模型,包括:
4.根据权利要求2或3所述的水下机器人囊体体积检测的方法,其特征在于,所述方法还包括:
5.根据权利要求1所述的水下机器人囊体体积检测的方法,其特征在于,所述方法还包括:
6.根据权利要求1所述的水下机器人囊体体积检测的方法,其特征在于,所述待测囊体的图像包括从多个角度采集的所述待测囊体的图像。
7.一种水下机器人囊体体积检测的装置,其特征在于,包括:
8.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1-6中任一项所述的水下机器人囊体体积检测的方法。
9.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1-6中任一项所述的水下机器人囊体体积检测的方法。
10.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6中任一项所述的水下机器人囊体体积检测的方法。
技术总结本发明涉及浮力调节技术领域,提供一种水下机器人囊体体积检测的方法及装置。上述的水下机器人囊体体积检测的方法,包括:获取待测囊体的图像;待测囊体表面设置有用于确定体积的标识图形;将图像输入至神经网络模型,获得神经网络模型输出的待测囊体的体积;其中,神经网络模型是采用多个囊体图像样本经过训练得到的,每一囊体图像样本包括囊体图像和对应的体积标签。上述的水下机器人囊体体积检测的方法,将图像作为输入,采用神经网络模型,即可得到待测囊体的体积,不需囊体之外的壳体或结构,最大限度地减小了待测囊体的重量,该水下机器人囊体体积检测的方法,不受温度和压力的干扰,鲁棒性强、反馈及时。技术研发人员:常文凯,吴正兴,周超,邓赛,李朋,魏俊杭,谭民受保护的技术使用者:中国科学院自动化研究所技术研发日:技术公布日:2024/7/25本文地址:https://www.jishuxx.com/zhuanli/20240730/193909.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表