车辆能耗测试工况相似度评价方法
- 国知局
- 2024-07-31 22:48:07
本发明涉及车辆行驶工况生成,尤其涉及一种车辆能耗测试工况相似度评价方法。
背景技术:
1、本部分提供的仅仅是与本公开相关的背景信息,其并不必然是现有技术。
2、汽车行驶工况(driving cycle)也称为汽车驾驶循环,描述汽车行驶的速度-时间曲线,描述了某一类型车辆在某一段道路或某一地区最具代表性的车辆行驶特征,是车辆能耗/排放测试方法和限值标准的基础,也是车辆开发与评价最为基础的依据,是汽车行业一项重要的共性基础技术。
3、目前,在世界范围内具有多种典型行驶工况,例如欧洲的新欧洲驾驶循环(neweuropean driving cycle,nedc)、世界轻型车辆测试循环(world light vehicle testcycle,wltc)、中国汽车行驶工况(china automotive test cycle,catc)等。
4、但是,单一典型的行驶工况难以代表复杂多变的实际驾驶情况,采用公开且固定式的单一典型行驶工况为基准所优化标定的汽车,标准认证能耗与实际用户能耗之间往往具有明显差异,现有技术通过构建生成贴近实际驾驶情况的新的能耗测试工况,以便全面且准确的评价车辆能耗,但是,如何准确地评价新生成的能耗测试工况与用户实际行驶工况之间的相似度,是当前需要解决的难题。
技术实现思路
1、本发明的目的是至少解决单一典型行驶工况为基准所优化标定的汽车,其法定认证结果与实际数据具有明显差异的问题。该目的是通过以下技术方案实现的:
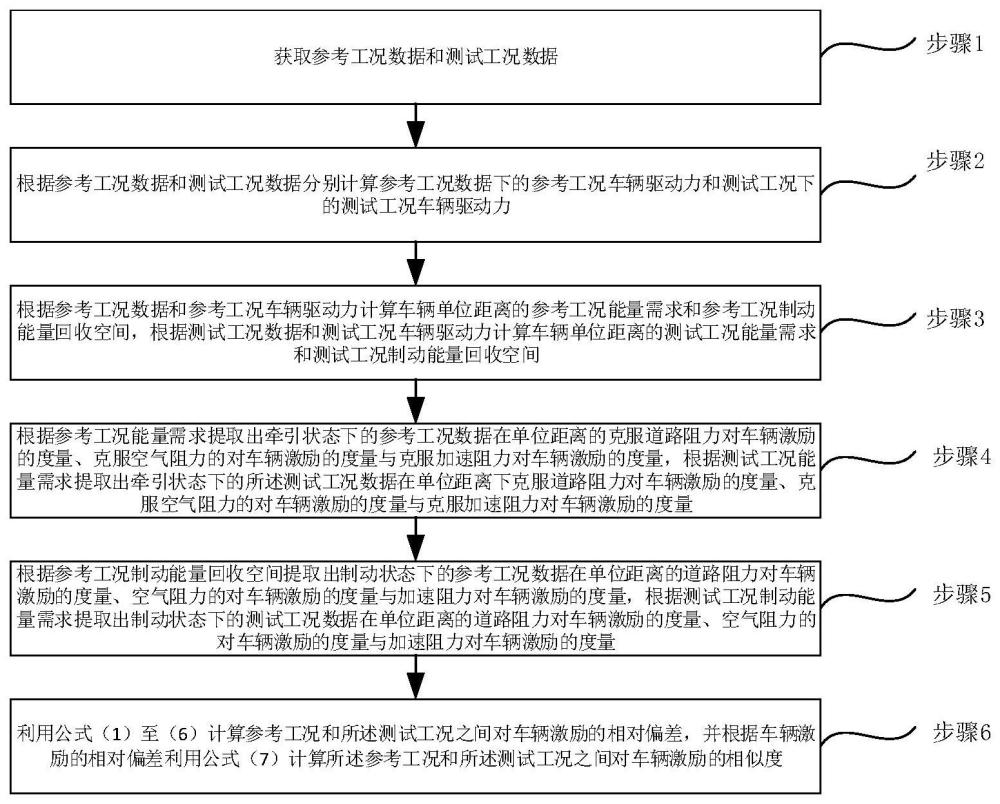
2、本发明的第一方面提出了一种车辆能耗测试工况相似度评价方法,车辆能耗测试工况相似度评价方法包括:获取参考工况数据v1(t)和测试工况数据v2(t);
3、根据所述参考工况数据v1(t)和所述测试工况数据v2(t)分别计算所述参考工况数据下的参考工况车辆驱动力f1(t)和所述测试工况数据下的测试工况车辆驱动力f2(t);
4、根据所述参考工况数据和所述参考工况车辆驱动力f1(t)计算车辆单位距离的参考工况能量需求和参考工况制动能量回收空间根据所述测试工况数据和所述测试工况车辆驱动力f2(t)计算车辆单位距离的测试工况能量需求和测试工况制动能量回收空间
5、根据所述参考工况能量需求提取出牵引状态下所述参考工况数据在单位距离内为克服道路阻力而对车辆施加的激励度量为克服空气阻力而对车辆施加的激励度量与为克服加速阻力而对车辆施加的激励度量根据所述测试工况能量需求提取出牵引状态下的所述测试工况数据在单位距离内为克服道路阻力而对车辆施加的激励度量为克服空气阻力而对车辆施加的激励度量与为克服加速阻力而对车辆施加的激励度量
6、根据所述参考工况单位距离的制动能量回收空间提取出制动状态下的所述参考工况数据在单位距离的道路阻力对车辆激励的度量空气阻力对车辆激励的度量与加速阻力对车辆激励的度量根据所述测试工况单位距离的制动能量需求提取出制动状态下的所述测试工况数据在单位距离的道路阻力对车辆激励的度量空气阻力对车辆激励的度量与加速阻力对车辆激励的度量
7、利用公式(1)至(6)计算所述参考工况和所述测试工况之间对车辆激励的相对偏差;
8、
9、
10、
11、
12、
13、
14、
15、根据所述车辆激励的相对偏差利用公式(7)计算所述参考工况和所述测试工况之间对车辆激励的相似度
16、在本发明的一些实施例中,所述车辆能耗测试工况相似度评价方法还包括:
17、设定怠速范围、编码区间和步长,根据所述怠速范围、所述编码区间和所述步长分别对所述参考工况数据和所述测试工况数据进行速度状态编码和加速度状态编码以获取参考工况一维状态编码数据和测试工况一维状态编码数据
18、根据所述参考工况一维状态编码数据建立速度-加速度的参考工况二维频数分布矩阵,根据所述测试工况一维状态编码数据建立速度-加速度的测试工况二维频数分布矩阵;
19、根据所述参考工况的速度-加速度二维频数分布矩阵计算参考工况的速度-加速度二维概率分布矩阵,根据所述测试工况的速度-加速度二维频数分布矩阵计算测试工况的速度-加速度二维概率分布矩阵;
20、根据所述参考工况和测试工况的速度-加速度二维概率分布矩阵计算所述参考工况数据和所述测试工况数据之间的速度-加速度二维概率分布矩阵的余弦相似度
21、
22、其中,ak表示所述测试工况的速度-加速度二维概率分布矩阵进行一维排列后的第k个分量;
23、bk表示所述参考工况的速度-加速度二维概率分布矩阵进行一维排列后的第k个分量;m2表示加速度状态数,m1表示速度状态数。
24、在本发明的一些实施例中,所述车辆能耗测试工况相似度评价方法还包括:
25、根据所述参考工况编码数据和测试工况编码数据分别建立速度-加速度双参数的参考工况马尔可夫状态转移矩阵p1和测试工况马尔可夫状态转移矩阵p2;
26、根据所述参考工况马尔可夫状态转移矩阵p1和所述测试工况马尔可夫状态转移矩阵p2计算所述参考工况数据和所述测试工况数据之间的马尔可夫状态转移概率矩阵的余弦相似度
27、
28、其中,n表示测试工况与参考工况马尔可夫状态转移矩阵中的状态数,马尔可夫状态转移矩阵的大小为n×n,且n=m1×m2;
29、ck表示所述测试工况马尔可夫状态转移矩阵p2进行一维排列后的第k个分量;
30、dk表示所述参考工况马尔可夫状态转移矩阵p1进行一维排列后的第k个分量。
31、在本发明的一些实施例中,所述车辆能耗测试工况相似度评价方法还包括:
32、根据所述速度-加速度二维概率分布矩阵的余弦相似度所述马尔可夫状态转移概率矩阵的余弦相似度和所述对车辆激励的相似度计算所述参考工况与所述测试工况的综合相似度φ;
33、
34、其中,ω1、ω2、ω3为比例系数,ω1、ω2和ω3均大于零,且ω1+ω2+ω3=1。
35、在本发明的一些实施例中,所述根据所述参考工况数据v1(t)和所述参考工况车辆驱动力f1(t)计算车辆单位距离的参考工况能量需求和参考工况制动能量回收空间根据所述测试工况数据和所述测试工况车辆驱动力f2(t)计算车辆单位距离的测试工况能量需求和测试工况制动能量回收空间的步骤包括:
36、计算车辆的驱动力f(t);
37、
38、式中,m为车辆质量,g为重力加速度,f为滚动阻力系数,i为道路坡度,cd为空气阻力系数,a为迎风面积,ρ为空气密度,δ为旋转质量换算系数;
39、在车辆处于非怠速状态下,根据f(t)>0划分为牵引区域t∈τtr,根据f(t)<0划分为制动区域t∈τbr;
40、根据f(t)>0和公式(8)计算车辆单位距离的能量需求
41、
42、将所述参考工况数据v1(t)和所述参考工况车辆驱动力f1(t)代入式(8)以获取所述参考工况单位距离的能量需求将所述测试工况数据v2(t)和所述测试工况车辆驱动力f2(t)代入式(8)以获取所述测试工况单位距离的能量需求
43、根据f(t)<0和公式(9)计算车辆单位距离的制动能量回收空间
44、
45、将所述参考工况数据v1(t)和所述参考工况车辆驱动力f1(t)代入式(9)以获取所述参考工况单位距离的制动能量回收空间将所述测试工况数据v2(t)和所述测试工况车辆驱动力f2(t)代入式(9)以获取所述测试工况单位距离的制动能量回收空间
46、其中,分别表示为克服道路阻力、空气阻力与加速阻力,单位距离的能量需求,分别表示道路阻力、空气阻力与加速阻力,单位距离为车辆提供的制动能量回收空间,xtot为总的行驶距离。
47、在本发明的一些实施例中,所述根据所述参考工况能量需求提取出牵引状态下的所述参考工况数据在单位距离的克服道路阻力对车辆激励的度量克服空气阻力的对车辆激励的度量与克服加速阻力对车辆激励的度量的步骤包括:
48、分别根据公式(10)、(11)和(12)计算
49、
50、
51、
52、于公式(10)、(11)、(12)中提取出只与所述参考工况相关的部分,作为所述参考工况的牵引区域对车辆激励的度量,使用公式(13)、(14)、(15)表示和计算分别计算和
53、
54、
55、
56、其中,计算所述测试工况的牵引区域对车辆激励的度量和的步骤与所述参考工况相同。
57、在本发明的一些实施例中,所述根据所述参考工况制动能量回收空间提取出制动状态下的所述参考工况数据在单位距离的道路阻力对车辆激励的度量空气阻力的对车辆激励的度量与加速阻力对车辆激励的度量的步骤包括:
58、分别使用公式(16)、(17)、(18)计算
59、
60、
61、
62、于公式(16)、(17)、(18)中提取出只与所述参考工况相关的部分,作为所述参考工况的制动区域对车辆激励的度量,使用公式(19)、(20)、(21)表示和计算
63、
64、
65、
66、其中,计算所述测试工况的制动区域对车辆激励的度量的步骤与所述参考工况相同。
67、在本发明的一些实施例中,所述设定怠速范围、编码区间和步长,根据所述怠速范围、所述编码区间和所述步长对所述参考工况数据进行状态编码以获取参考工况一维状态编码数据s1t的步骤包括:
68、根据所述参考工况数据的速度v1(t)计算每一时刻t对应的加速度a1(t);
69、设定速度怠速区间[0,vidle)、加速度怠速区间(-aidle,aidle)、速度编码区间[0,vmax]、加速度编码区间[amin,amax];设定速度编码步长δv、加速度编码步长δa;
70、分别对所述参考工况数据的速度与加速度进行状态编码,以获取速度状态编码vt和加速度状态编码at;
71、
72、
73、将速度状态编码vt和加速度状态编码at转换为一维状态编码
74、
75、
76、floor表示向负无穷方向取整;
77、其中,计算所述测试工况一维状态编码数据的步骤与计算所述参考工况一维状态编码数据的步骤相同。
78、在本发明的一些实施例中,所述根据所述参考工况编码数据建立速度-加速度双参数的参考工况马尔可夫状态转移矩阵p1的步骤包括:
79、根据所述速度-加速度的一维状态编码统计状态si到状态sj的转移频数fij,创建大小为n×n的状态转移频数矩阵f;
80、
81、使用kneser-ney平滑算法估计状态si到状态sj的转移概率pij;
82、根据转移概率pij利用最大似然创建大小为n×n的双参数马尔可夫状态转移矩阵p1;
83、n=m1×m2为一维状态数,pij为状态si到状态sj的转移概率;
84、
85、nij为状态si到状态sj的转移频数;ni为处于状态si的频数,
86、其中,计算所述测试工况马尔可夫状态转移矩阵p2的步骤与计算所述参考工况马尔可夫状态转移矩阵pi的步骤相同。
87、在本发明的一些实施例中,ω1=ω2=ω3=1/3。
88、根据本发明提出的能耗测试工况相似度评价方法,通过计算参考工况与测试工况之间对车辆激励的相对偏差,并利用对车辆激励的相对偏差计算参考工况与测试工况对车辆激励的相似度从而准确地评价参考工况和测试工况之间能耗的相似度,进而提高了利用测试工况对车辆的能耗测试效率以及分析评价的准确性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/194680.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表