监控数据处理方法及装置、存储介质、终端
- 国知局
- 2024-07-31 23:10:08
本技术涉及人工智能,特别是涉及一种监控数据处理方法及装置、存储介质、终端。
背景技术:
1、人机协同作业作为一个重要的研究方向,在基于自主机器人的智能监控系统方面,旨在确保监控系统能够及时、准确地捕获并处理监控数据,以保障被监控区域的安全。
2、传统监控系统的工作流程通常是由监控设备现场采集监控数据,再将监控数据从监控设备传输到中央服务器进行处理和分析。然而,由于监控数据传输过程繁琐,易导致实时监视出现延迟;并且由于需要将监控数据从监控设备传输到中央服务器,在数据的传输过程中可能存在窃取、篡改等安全风险,导致数据被泄露或损坏,进而威胁到用户的隐私。因此,亟需一种监控数据处理方法,以解决上述问题。
技术实现思路
1、有鉴于此,本技术提供一种监控数据处理方法及装置、存储介质、终端,主要目的在于改善现有实时监视出现延迟以及由于数据传输过程中被窃取、篡改,导致数据被泄露或损坏的问题。
2、依据本技术一个方面,提供了一种监控数据处理方法,包括:
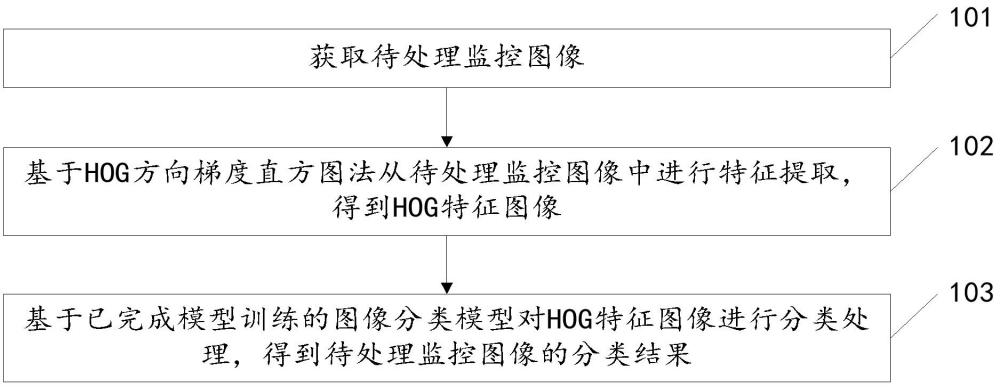
3、获取待处理监控图像,所述待处理监控图像是由无人机采集,并基于动作定位器对所述无人机进行定位得到的定位结果,对所述无人机采集的图像进行校正得到的;
4、基于hog方向梯度直方图法从所述待处理监控图像中进行特征提取,得到hog特征图像,所述特征提取是在本地进行的;
5、基于已完成模型训练的图像分类模型对所述hog特征图像进行分类处理,得到所述待处理监控图像的分类结果,所述图像分类模型是基于联邦学习算法,由中央服务器对多个终端训练的本地模型进行模型参数聚合得到的。
6、优选的,所述基于hog方向梯度直方图法从所述待处理监控图像中进行特征提取,得到hog特征图像,包括:
7、基于下述公式分别计算水平梯度以及垂直梯度,
8、
9、
10、其中,表示水平梯度,表示垂直梯度,i表示待处理监控图像中各个像素的像素值;
11、基于下述公式根据所述水平梯度以及所述垂直梯度分别计算各个像素的幅值以及方向角度,
12、
13、
14、其中,g表示各个像素的幅值,表示方向角度,表示水平梯度,表示垂直梯度;
15、将所述待处理监控图像按照预设像素尺寸划分为多个第一单元格,生成各个所述第一单元格的幅值列表以及方向角度列表;
16、将所述方向角度列表中所包含的各个方向角度对应到各个组别中,将各个所述方向角度对应的幅值分别累加到各个所述方向角度对应的所述组别中,基于各个所述组别对应的累加幅值生成所述第一单元格的第一梯度直方图,所述第一梯度直方图的直方数量与所述组别数量相同,所述组别是根据0到180度的角度范围按照预设角度单元预先划分得到的;
17、将预设数量的所述第一单元格进行组合,得到第二单元格,并将所述预设数量的第一单元格所对应的第一梯度直方图进行拼接,得到所述第二单元格的第二梯度直方图,并对所述第二梯度直方图进行归一化处理;
18、将归一化处理后的全量第二梯度直方图进行拼接处理,得到所述待处理监控图像的hog特征图像。
19、优选的,所述基于已完成模型训练的图像分类模型对所述hog特征图像进行分类处理,得到所述待处理监控图像的分类结果之前,所述方法还包括:
20、从中央服务器下载初始图像分类模型,所述初始图像分类模型是基于卷积神经网络构建的;
21、基于预设训练数据集对所述初始图像分类模型进行模型训练,得到更新后的图像分类模型,所述预设训练数据集是基于本地数据构建的;
22、基于预设测试数据集对所述更新后的图像分类模型进行测试,若各项评估指标均满足对应的评估标准,则将所述更新后的图像分类模型上传至所述中央服务器,并接收已完成模型训练的图像分类模型,以基于所述图像分类模型对所述hog特征图像进行分类处理,所述已完成模型训练的图像分类模型是所述中央服务器将多个本地更新后的图像分类模型进行聚合得到的。
23、优选的,所述基于预设数据集对所述初始图像分类模型进行模型训练,得到更新后的图像分类模型,包括:
24、基于所述初始图像分类模型对所述预设训练数据集中的样本进行分类处理,得到各个所述样本的预测分类结果;
25、计算所述预测分类结果与所述样本的真实分类结果之间的损失函数;
26、基于梯度下降算法更新所述初始图像分类模型的模型参数,以使所述损失函数减小,直至满足预设模型训练条件,停止模型训练,得到更新后的图像分类模型。
27、优选的,所述获取待处理监控图像,包括:
28、获取无人机采集的监控图像;
29、基于超声波数据法,确定所述无人机的高度;
30、基于下述公式,根据所述高度确定所述无人机在无人机坐标系中的位置坐标,
31、
32、其中,x、y、z表示无人机在无人机坐标系中的位置坐标,表示无人机在x方向的正切值,表示无人机在y方向的正切值;
33、基于下述公式将所述无人机在无人机坐标系中的位置坐标转换到协作机器人坐标系中,所述协作机器人配备有所述动作定位器,
34、
35、其中,x、y、z表示无人机在无人机坐标系中的位置坐标,、、表示无人机在协作机器人坐标系中的位置坐标,h表示无人机的高度;
36、基于所述转换后的坐标位置对所述监控图像进行修正,得到待处理监控图像。
37、优选的,所述基于超声波数据法确定所述无人机的高度,包括:
38、基于下述公式确定所述无人机的高度,
39、
40、其中,表示无人机高度的函数,表示协作机器人的位置向量,z表示无人机的高度,表示无人机在x方向的正切值,表示无人机在y方向的正切值,r表示无人机的旋转矩阵,表示无人机相对于地面的飞行角度。
41、依据本技术另一个方面,提供了一种监控数据处理装置,包括:
42、图像获取模块,用于获取待处理监控图像,所述待处理监控图像是由无人机采集,并基于动作定位器对所述无人机进行定位得到的定位结果,对所述无人机采集的图像进行校正得到的;
43、特征提取模块,用于基于hog方向梯度直方图法从所述待处理监控图像中进行特征提取,得到hog特征图像,所述特征提取是在本地进行的;
44、图像分类模块,用于基于已完成模型训练的图像分类模型对所述hog特征图像进行分类处理,得到所述待处理监控图像的分类结果,所述图像分类模型是基于联邦学习算法,由中央服务器对多个终端训练的本地模型进行模型参数聚合得到的。
45、优选的,所述特征提取模块,具体用于:
46、基于下述公式分别计算水平梯度以及垂直梯度,
47、
48、
49、其中,表示水平梯度,表示垂直梯度,i表示待处理监控图像中各个像素的像素值;
50、基于下述公式根据所述水平梯度以及所述垂直梯度分别计算各个像素的幅值以及方向角度,
51、
52、
53、其中,g表示各个像素的幅值,表示方向角度,表示水平梯度,表示垂直梯度;
54、将所述待处理监控图像按照预设像素尺寸划分为多个第一单元格,生成各个所述第一单元格的幅值列表以及方向角度列表;
55、将所述方向角度列表中所包含的各个方向角度对应到各个组别中,将各个所述方向角度对应的幅值分别累加到各个所述方向角度对应的所述组别中,基于各个所述组别对应的累加幅值生成所述第一单元格的第一梯度直方图,所述第一梯度直方图的直方数量与所述组别数量相同,所述组别是根据0到180度的角度范围按照预设角度单元预先划分得到的;
56、将预设数量的所述第一单元格进行组合,得到第二单元格,并将所述预设数量的第一单元格所对应的第一梯度直方图进行拼接,得到所述第二单元格的第二梯度直方图,并对所述第二梯度直方图进行归一化处理;
57、将归一化处理后的全量第二梯度直方图进行拼接处理,得到所述待处理监控图像的hog特征图像。
58、优选的,所述图像分类模块之前,所述装置还包括:
59、模型构建模块,用于从中央服务器下载初始图像分类模型,所述初始图像分类模型是基于卷积神经网络构建的;
60、模型训练模块,用于基于预设训练数据集对所述初始图像分类模型进行模型训练,得到更新后的图像分类模型,所述预设训练数据集是基于本地数据构建的;
61、模型测试模块,用于基于预设测试数据集对所述更新后的图像分类模型进行测试,若各项评估指标均满足对应的评估标准,则将所述更新后的图像分类模型上传至所述中央服务器,并接收已完成模型训练的图像分类模型,以基于所述图像分类模型对所述hog特征图像进行分类处理,所述已完成模型训练的图像分类模型是所述中央服务器将多个本地更新后的图像分类模型进行聚合得到的。
62、优选的,所述模型训练模块,具体用于:
63、基于所述初始图像分类模型对所述预设训练数据集中的样本进行分类处理,得到各个所述样本的预测分类结果;
64、计算所述预测分类结果与所述样本的真实分类结果之间的损失函数;
65、基于梯度下降算法更新所述初始图像分类模型的模型参数,以使所述损失函数减小,直至满足预设模型训练条件,停止模型训练,得到更新后的图像分类模型。
66、优选的,所述图像获取模块,具体包括:
67、图像采集单元,用于获取无人机采集的监控图像;
68、高度确定单元,用于基于超声波数据法,确定所述无人机的高度;
69、三维坐标确定单元,用于基于下述公式,根据所述高度确定所述无人机在无人机坐标系中的位置坐标,
70、
71、其中,x、y、z表示无人机在无人机坐标系中的位置坐标,表示无人机在x方向的正切值,表示无人机在y方向的正切值;
72、坐标转换单元,用于基于下述公式将所述无人机在无人机坐标系中的位置坐标转换到协作机器人坐标系中,所述协作机器人配备有所述动作定位器,
73、
74、其中,x、y、z表示无人机在无人机坐标系中的位置坐标,、、表示无人机在协作机器人坐标系中的位置坐标,h表示无人机的高度;
75、图像修正单元,用于基于所述转换后的坐标位置对所述监控图像进行修正,得到待处理监控图像。
76、优选的,所述高度确定单元,具体用于:
77、基于下述公式确定所述无人机的高度,
78、
79、其中,表示无人机高度的函数,表示协作机器人的位置向量,z表示无人机的高度,表示无人机在x方向的正切值,表示无人机在y方向的正切值,r表示无人机的旋转矩阵,表示无人机相对于地面的飞行角度。
80、根据本技术的又一方面,提供了一种存储介质,所述存储介质中存储有至少一条可执行指令,所述可执行指令使处理器执行如上述监控数据处理方法对应的操作。
81、根据本技术的再一方面,提供了一种终端,包括:处理器、存储器、通信接口和通信总线,所述处理器、所述存储器和所述通信接口通过所述通信总线完成相互间的通信;
82、所述存储器用于存放至少一条可执行指令,所述可执行指令使所述处理器执行上述监控数据处理方法对应的操作。
83、借由上述技术方案,本技术实施例提供的技术方案至少具有下列优点:
84、本技术提供了一种监控数据处理方法及装置、存储介质、终端,首先获取待处理监控图像,所述待处理监控图像是由无人机采集,并基于动作定位器对所述无人机进行定位得到的定位结果,对所述无人机采集的图像进行校正得到的;其次基于hog方向梯度直方图法从所述待处理监控图像中进行特征提取,得到hog特征图像,所述特征提取是在本地进行的;最后基于已完成模型训练的图像分类模型对所述hog特征图像进行分类处理,得到所述待处理监控图像的分类结果,所述图像分类模型是基于联邦学习算法,由中央服务器对多个终端训练的本地模型进行模型参数聚合得到的。与现有技术相比,本技术实施例通过在本地对待处理监控图像进行特征提取得到hog特征图像,再基于联邦学习算法训练得到的图像分类模型对hog特征图像进行分类得到分类结果,由于特征提取以及分类均在本地进行,无需将监控图像传输至中央服务器,降低了数据在传输过程中被窃取、篡改的风险,保证了用户隐私,同时由于省去了数据传输的步骤,优化了数据处理过程,保证了实时监视的时效性;并且通过无人机采集监控图像,再根据动作定位器对无人机进行定位得到定位结果,并根据定位结果校正监控图像,最后对校正后的监控图像进行处理,降低了无人机的拍摄失真程度,从而提高了监控图像分类结果的准确率。
85、上述说明仅是本技术技术方案的概述,为了能够更清楚了解本技术的技术手段,而可依照说明书的内容予以实施,并且为了让本技术的上述和其它目的、特征和优点能够更明显易懂,以下特举本技术的具体实施方式。
本文地址:https://www.jishuxx.com/zhuanli/20240730/196198.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。