一种电动汽车AFS系统的RBF神经网络滑模控制方法
- 国知局
- 2024-07-31 23:29:41
本发明属于新能源电动汽车控制领域,涉及一种控制方法,特别涉及一种电动汽车afs系统的rbf神经网络滑模控制方法。
背景技术:
1、随着车辆控制技术的不断进步,研究人员越来越关注车辆的横向稳定性。作为车辆主动安全控制方法之一,主动前转向系统(afs)能够进行转向干预,进而主动改变前轮转角。并且车辆响应可以尽可能地跟踪理想的车辆响应特性,从而增强车辆的操控性和稳定性。
2、近年来,学者们对afs的不同控制方法进行了研究。例如,pid控制在afs中有着广泛的应用。然而,车辆动力学系统是一个复杂的时变非线性系统,具有很高的不确定性,例如建模误差、参数扰动和外部扰动,这将影响闭环控制系统的性能。在这种情况下,线性控制解决方案可能不能很好地工作。随后,一些学者提出了不同的基于最优控制理论的方案来解决上述问题。通过控制二次目标函数来设计最优反馈矩阵。在这些方法中,滑模控制因其良好的鲁棒性而被广泛应用于车辆主动安全控制,而不需要对系统进行精确的数学描述。然而,基于线性滑动表面的smc面临两个挑战。首先,当考虑状态变量的固定时间收敛性时,传统的滑模面无法实现。另一个是固有的抖振会影响控制效率。因此,提出一种在固定时间内系统收敛和减小固有抖振的主动前轮转向控制方法是有必要的。
技术实现思路
1、本发明提出了一种电动汽车afs系统的rbf神经网络滑模控制方法,提高了车辆行驶在极端工况下的横向稳定性,使车辆响应可以跟踪上理想的响应特性。
2、本发明的技术方案包括以下部分:一种电动汽车afs系统的rbf神经网络滑模控制方法,包括以下步骤:
3、步骤1、建立理想二自由度车辆动力学模型,根据该动力学模型求得理想横摆角速度;
4、步骤2、将实际横摆角速度与其理想值的误差作为状态变量,设计一种固定时间非奇异终端滑模面;
5、步骤3、基于步骤1中建立的二自由度车辆动力学模型和步骤2中设计的固定时间非奇异终端滑模面设计主动前轮转向控制器;
6、步骤4、根据实际横摆角速度与其理想值的误差设计rbf神经网络扰动观测器;
7、步骤5、根据步骤3设计的固定时间非奇异终端滑模控制器和步骤4设计的rbf神经网络观测器构造复合控制器。
8、进一步,在所述步骤1中,二自由度车辆动力学模型为:
9、
10、
11、其中m为汽车质量,vx为车辆纵向行驶速度,β为车辆行驶质心侧偏角,r为车辆横摆角速度,cf、cr分别代表车辆前、后轮侧偏刚度,a、b分别代表车辆前、后轮到质心的距离,iz为车辆质心绕z轴的转动惯量,δf为前轮转角,d(t)为集总干扰变量;
12、理想横摆角速度rd的计算公式如下:
13、
14、其中表示理想横摆角速度的上界,g为重力加速度,μ为路面摩擦系数,sign为符号函数,控制器的目的是使实际横摆角速度能够追踪上理想横摆角速度。
15、进一步,在所述步骤2中,固定时间非奇异终端滑模面的函数表达式为:
16、
17、
18、上式中r为车辆横摆角速度,rd为理想横摆角速度,sign为符号函数,ξ为正常数,a1>0,b1>0,m1>0,m2>0,
19、进一步,在所述步骤3中,主动前轮转向控制器为:
20、
21、上式中r为车辆横摆角速度,rd为理想横摆角速度,vx为车辆纵向行驶速度,cf、cr分别代表车辆前、后轮侧偏刚度,a、b分别代表车辆前、后轮到质心的距离,iz为车辆质心绕z轴的转动惯量,sign为符号函数,a1>0,b1>0,m1>0,m2>0,a2>0,b2>0,k1为正常数,δf为前轮转角。
22、进一步,为避免产生奇异现象,上述滑模面、控制器的设计中均不能包含负指数项,因此控制器参数的选取范围应进一步选取如下:m1>1,n1>1,在滑模面求导后存在扰动项该扰动项存在上界值d1,为保证系统收敛性,选取控制器参数k1>d1。
23、进一步,在所述步骤4中,rbf神经网络扰动观测器设计为:
24、
25、上式中是连接权重的向量的转秩,h是rbf神经网络中的激活函数向量。
26、进一步,所述rbf神经网络扰动观测器,为了使rbf神经网络输出可以更好得逼近扰动,提高自主学习能力和逼近精度,选取权重自适应律如下:
27、
28、上式中λ为设计参数并且λ>0,s为所设计固定时间非奇异终端滑模面;激活函数h=[h1,h2,h3,h4,h5]t选取为高斯函数如下:
29、
30、上式中是rbf神经网络的输入向量,r为车辆横摆角速度,rd为理想横摆角速度,ci和bi表示第i个高斯函数的中心和宽度。
31、进一步,在所述步骤5中,复合控制器为:
32、
33、上式中r为车辆横摆角速度,rd为理想横摆角速度,vx为车辆纵向行驶速度,cf、cr分别代表车辆前、后轮侧偏刚度,a、b分别代表车辆前、后轮到质心的距离,iz为车辆质心绕z轴的转动惯量,sign为符号函数,δf为前轮转角,s为所设计固定时间非奇异终端滑模面,a1>0,b1>0,m1>1,a2>0,b2>0,n1>1k1为正常数,为rbf神经网络扰动观测值。
34、进一步,由于rbf神经网络观测器对扰动的补偿,k1的取值与扰动无关,无需满足k1>d1的条件,只需要大于0就可以使系统稳定,有效改善了系统的抖振问题。
35、本发明具有的突出效果如下:
36、1)本发明设计的基于rbf神经网络的电动汽车主动前轮转向系统的固定时间非奇异终端滑模控制器控制器可以使车辆在高速转弯工况下施加附加前轮转角对车辆行驶轨迹进行修正,进一步提高了车辆行驶安全性;
37、2)本发明提出的固定时间非奇异终端滑模控制器解决了汽车主动前轮转向控制系统稳定时间与初始值有关的问题,使系统稳定时间只与控制器参数有关;
38、3)设计的rbf神经网络观测器对干扰进行补偿,显著降低了所设计控制器中的控制增益,进一步抑制了存在的抖振问题。
39、4)设计的rbf神经网络与固定时间非奇异终端滑模复合控制器可以更好得使实际车辆响应参数跟踪上理想目标值,提高车辆横向稳定性。
40、附图和表格说明
41、表1为电动汽车相关参数;
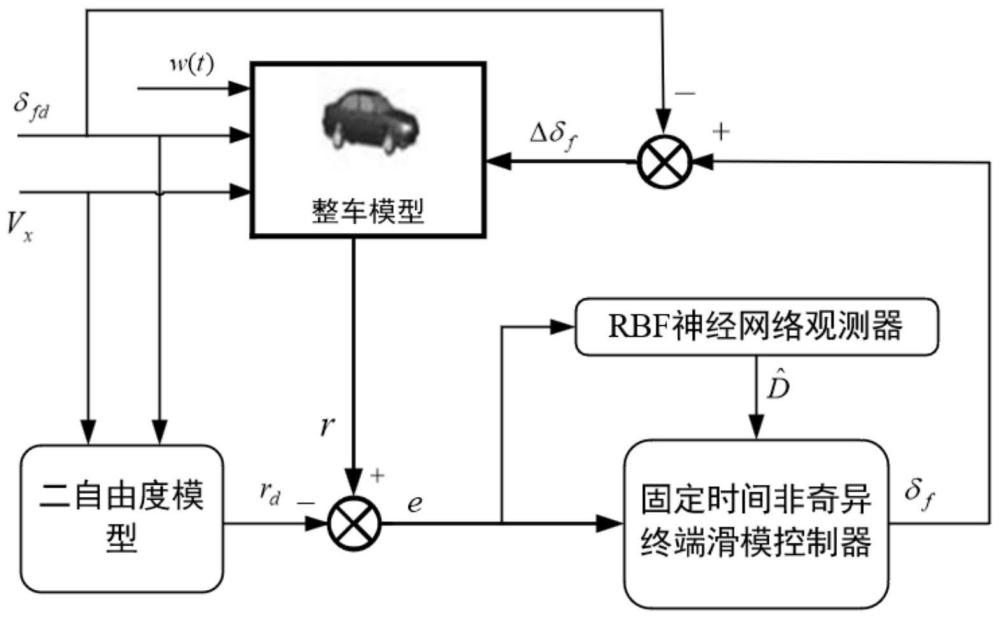
42、图1是本发明的控制系统整体结构框图;
43、图2是车辆二自由度数学模型;
44、图3是rbf神经网络结构图;
45、图4是侧向风干扰随时间的变化曲线;
46、图5是方向盘转角随时间的变化曲线;
47、图6是侧向风干扰下的横摆角速度随时间的变化曲线;
48、图7是侧向风干扰下的车辆行驶轨迹随时间的变化曲线。
技术特征:1.一种电动汽车afs系统的rbf神经网络滑模控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,在所述步骤1中,二自由度车辆动力学模型为:
3.根据权利要求1所述的方法,其特征在于,在所述步骤2中,固定时间非奇异终端滑模面的函数表达式为:
4.根据权利要求1所述的方法,其特征在于,在所述步骤3中,主动前轮转向控制器为:
5.根据权利要求书4所述的方法,其特征在于,为避免产生奇异现象,上述滑模面、控制器的设计中均不能包含负指数项,因此控制器参数的选取范围应进一步选取如下:m1>1,n1>1,在滑模面求导后存在扰动项该扰动项存在上界值d1,为保证系统收敛性,选取控制器参数k1>d1。
6.根据权利要求1所述的方法,其特征在于,在所述步骤4中,rbf神经网络扰动观测器设计为:
7.根据权利要求6所述的方法,其特征在于,所述rbf神经网络扰动观测器,为了使rbf神经网络输出可以更好得逼近扰动,提高自主学习能力和逼近精度,选取权重自适应律如下:
8.根据权利要求1所述的方法,其特征在于,在所述步骤5中,复合控制器为:
9.根据权利要求8所述的方法,其特征在于,由于rbf神经网络观测器对扰动的补偿,k1的取值与扰动无关,无需满足k1>d1的条件,只需要大于0就可以使系统稳定,有效改善了系统的抖振问题。
技术总结本发明公开了一种电动汽车AFS系统的RBF神经网络滑模控制方法,属于电动汽车控制领域,该控制方法在极端工况下,可提高车辆的横向稳定性。主要步骤:1、构建车辆理想二自由度动力学模型,通过该模型计算车辆的理想横摆角速度;2、设计一种固定时间非奇异终端滑面,并根据此滑模面设计主动前轮转向控制器;3、设计神经网络观测器,根据观测器模块对控制器增益部分进行补偿。本发明的优点:其一,车辆在极端环境下行驶可对车辆行驶轨迹进行修正,提高车辆行驶安全性;其二,所述控制方法使系统稳定时间只与控制器参数有关;其三,观测器模块对干扰进行补偿,显著降低了所设计控制器中的控制增益,抑制了存在的抖振问题。技术研发人员:丁世宏,陈一伦,刘陆,马莉受保护的技术使用者:江苏大学技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240730/197785.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。