一种拆解线的调节方法、计算机可读存储介质以及拆解线与流程
- 国知局
- 2024-07-31 23:30:17
本发明涉及拆解线控制,具体涉及一种拆解线的调节方法、计算机可读存储介质以及拆解线。
背景技术:
1、在现代制造业中,拆解线平衡问题是一个关键的优化问题,它涉及到如何有效地分配拆解任务到各个工作站,以最大化生产效率和最小化成本。随着产品复杂性的增加和对环境可持续性的日益关注,拆解线平衡问题在电子废物回收、汽车零部件回收等领域的重要性日益凸显。
2、现有的拆解线平衡方法主要依赖于元启发式算法,如遗传算法、蚁群优化、粒子群优化等。这些算法通过模拟自然界中的某些现象来解决复杂的优化问题,它们在处理拆解线平衡问题时显示出了一定的有效性。
3、现有技术中,利用一系列工作将各种可行的ai方法应用到拆卸线平衡问题并加以改进。基于部分拆卸线的条件,分别建立了随机部分拆卸线平衡模型和部分破坏性拆卸线平衡模型等等,并提出了相应元启发式算法用于解决问题。
4、然而,尽管元启发式算法在解决拆解线平衡问题方面取得了一定的成功,但它们也存在如下一些显著的缺点和不足:
5、(1)全局搜索能力:元启发式算法往往在局部搜索中表现出色,但在全局搜索能力上存在不足。这可能导致算法陷入局部最优解,而非全局最优解。
6、(2)算法参数调整:元启发式算法的参数设置对搜索性能有很大影响,但这些参数的最佳值通常难以确定,需要通过大量实验来调整,这增加了实施的复杂性和时间成本。
7、(3)动态适应性:在面对生产环境的变化,如产品结构的更新或工作站条件的变化时,元启发式算法可能无法快速适应这些变化。
8、(4)解的稳定性:元启发式算法的解可能会受到随机因素的影响,导致解的稳定性不足。在实际生产环境中,这种不稳定性可能会影响拆解线的效率和可靠性。
9、因此,现有技术有待于进一步发展。
技术实现思路
1、本发明的目的在于克服上述技术不足,提供一种拆解线系统及拆解线的调节方法,以解决相关技术中拆解线的调节方法、计算机可读存储介质以及拆解线的技术问题。
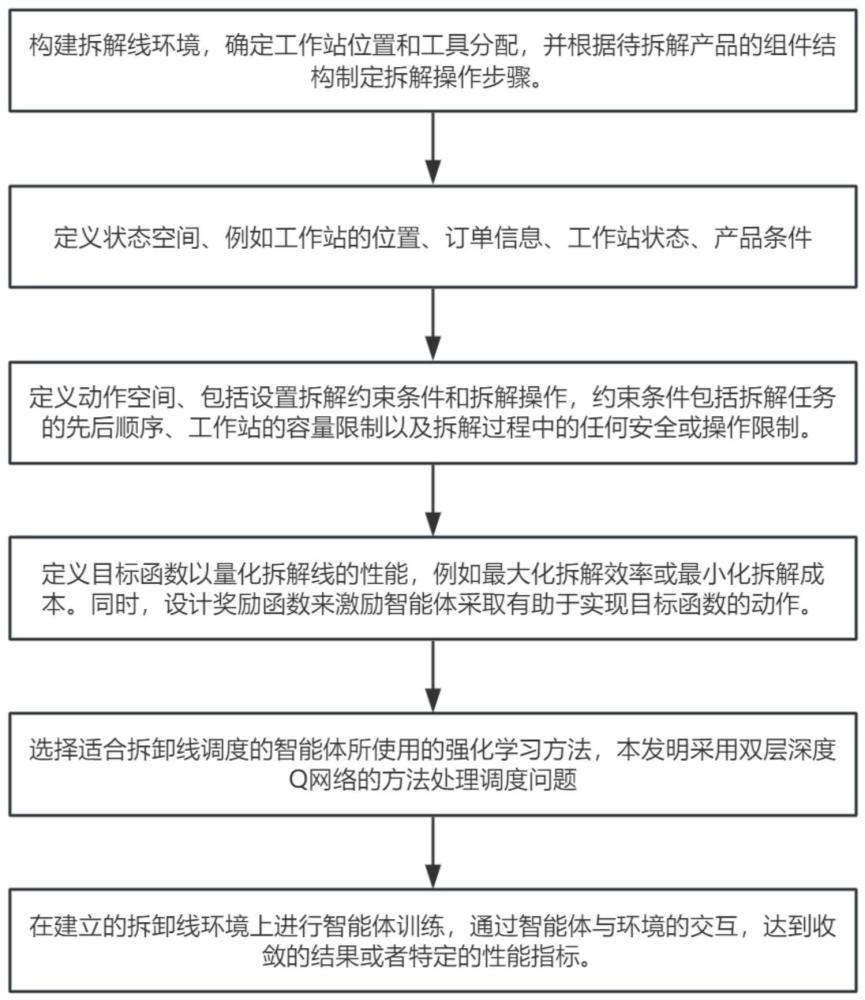
2、为达到上述技术目的,本发明采取了以下技术方案:提供了一种拆解线的调节方法,包括:根据待拆解产品的待拆解部件结构,确定拆解待拆解部件结构的操作步骤;配置拆解线的资源布局,以形成状态空间,状态空间包括描述拆解线在任何给定时间点的全局参数;根据状态空间,设置拆解步骤以及相应的约束条件,构成动作空间;定义目标函数以量化拆解线的性能,定义奖励函数以激励智能体采取有助于实现目标函数的动作;利用双深度q网络,根据建立的状态空间和动作空间对智能体进行强化学习训练;智能体通过与环境的交互学习最优策略,直到满足预设的收敛条件。
3、进一步地,状态空间包括订单信息、工作站状态、产品的具体参数。
4、进一步地,动作空间包括工作站的分配情况、拆解任务的顺序、工作站的容量以及拆解过程中的操作限制。
5、进一步地,定义目标函数的方法包括:根据最大化拆解效率为目标定义目标函数;或者,根据最小化拆解成本为目标定义目标函数。
6、进一步地,对动作空间进行强化学习训练的方法包括:初始化一个dnn神经网络main_q和经验回放池;智能体观察当前拆解线工作状态s(t);智能体通过ε-greedy策略在一定概率下随机选择动作a(t);利用所选动作将待拆解部件送往指定工作站进行拆解,并获得拆解步骤奖励r;观察拆解线新的状态s(t+1)后,将经验{s(t),a(t),r,s(t+1)}存入经验回放池;其中,经验{s(t),a(t),r,s(t+1)}用于更新main_q参数。
7、进一步地,拆解线的调节方法包括:初始化一个与dnn神经网络main_q结构相同的dnn神经网络target_q;在经验存入经验回放池的过程中,利用target_q网络计算当前状态s(t)的目标值;利用神经网络main_q计算损失函数;利用梯度下降法更新main_q网络的参数;其中,target_q中的参数每经过固定时间更新一次。
8、一种计算机可读存储介质,计算机存储介质中存储有计算机可读指令,当计算机可读指令在通信装置上运行时,使得上述的方法被执行。
9、一种拆解线,包括:工作站,工作站用于接收待拆解部件;操作工具,操作工具用于对拆解部件进行拆解作业;控制模块,控制模块用于配置工作站和操作待拆解部件,并形成待拆解部件的拆解作业的操作步骤;智能体,智能体根据拆解步骤进行计算和学习,以对待拆解部件的拆解作业的操作步骤进行调整后,重新部署控制模块;计算机可读指令,当计算机可读指令在拆解线上运行时,使得上述的方法被执行。
10、进一步地,工作站为多个,多个工作站均用于接受待拆解部件,以接收处于不同的拆解步骤的待拆解部件。
11、进一步地,工作站包括:自动工作站,拆解工具包括自动拆解工具,自动拆解工具用于与自动工作站匹配,以对待拆解部件进行非人工的拆解工作;人工工作站,拆解工具包括人工拆解工具,人工拆解工具用于与人工工作站匹配,以对待拆解部件进行非人工的拆解工作。
12、有益效果:
13、(1)提升拆解效率:通过强化学习算法的动态调整能力,预计能够显著减少拆解过程中的等待时间和操作时间。具体而言,本发明方法有望将整体拆解时间缩短15%至20%,从而提高生产效率。
14、(2)增强系统适应性:本发明的强化学习模型能够应对拆解环境中的不确定性,如产品结构的更新或工作站条件的变化,从而保持拆解线的高效运行。这种适应性使得系统能够在面对操作失败时迅速调整策略,保持拆解系统高效运行。
15、(3)提高灵活性:通过合理调度拆解任务,本发明方法不仅能够充分利用人工操作的灵活性,还能够结合自动化拆解站的高效率,实现拆解任务的灵活调度。这种灵活性使得拆解线能够更好地应对生产波动和紧急情况。
16、(4)资源利用率优化:本发明的方法能够根据实时的生产数据和环境变化,智能地调整拆解过程中的资源分配,包括人力、材料和能源等。这种优化策略预计将减少资源浪费,提高资源的整体利用率,可能实现资源消耗降低10%至15%。
技术特征:1.一种拆解线的调节方法,其特征在于,包括:
2.根据权利要求1所述的拆解线的调节方法,其特征在于,所述状态空间包括订单信息、工作站状态、产品的具体参数。
3.根据权利要求1所述的拆解线的调节方法,其特征在于,所述动作空间包括工作站的分配情况、拆解任务的顺序、工作站的容量以及拆解过程中的操作限制。
4.根据权利要求1所述的拆解线的调节方法,其特征在于,定义目标函数的方法包括:
5.根据权利要求1所述的拆解线的调节方法,其特征在于,对所述动作空间进行强化学习训练的方法包括:
6.根据权利要求5所述的拆解线的调节方法,其特征在于,所述拆解线的调节方法包括:
7.一种计算机可读存储介质,其特征在于,所述计算机存储介质中存储有计算机可读指令,当所述计算机可读指令在通信装置上运行时,使得权利要求1~6中任一项所述的方法被执行。
8.一种拆解线,其特征在于,包括:
9.根据权利要求8所述的拆解线,其特征在于,所述工作站为多个,多个所述工作站均用于接受所述待拆解部件,以接收处于不同的拆解步骤的所述待拆解部件。
10.根据权利要求9所述的拆解线,其特征在于,所述工作站包括:
技术总结本发明提供了一种拆解线的调节方法、计算机可读存储介质以及拆解线。拆解线的调节方法包括:根据待拆解产品的待拆解部件结构,确定拆解待拆解部件结构的操作步骤;配置拆解线的资源布局,以形成状态空间,状态空间包括描述拆解线在任何给定时间点的全局参数;根据状态空间,设置拆解步骤以及相应的约束条件,构成动作空间;定义目标函数以量化拆解线的性能,定义奖励函数以激励智能体采取有助于实现目标函数的动作;利用双深度Q网络,根据建立的状态空间和动作空间对智能体进行强化学习训练;智能体通过与环境的交互学习最优策略,直到满足预设的收敛条件,本发明的拆解线的调节方法解决了现有技术中的拆解线进行拆解的成本高的技术问题。技术研发人员:张俊英,何瑛,陈启清,宋文君,王婷婷,史铭立,徐小文,于秋霞受保护的技术使用者:青岛鹏海软件有限公司技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240730/197809.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表