一种光伏系统最大功率点追踪方法
- 国知局
- 2024-07-31 23:30:38
本发明涉及光伏系统领域,尤其涉及一种光伏系统最大功率点追踪方法。
背景技术:
1、光伏太阳能板安装方便,维修成本低廉,使用寿命长,光伏发电技术在我国得到了广泛的应用。在实际使用光伏组件中,由于天气因素多变,太阳光的入射角度也经常发生改变,导致阴影遮蔽条件下光伏发电过程中会出现局部特性曲线突变。在观察最大功率跟踪过程中常常不能准确找到最大功率点。所以光伏发电中突变条件下最大功率点追踪是研究光伏系统中不可或缺的一点。世界范围内对局部遮荫(partial shading condition,psc)的研究一直在进行中,受到了领域内研究学者的广泛关注。因此,让光伏系统稳定运行在最大功率点并减少光伏系统器件损耗方面的研究非常重要,能够为后续光伏系统并网运行提高可靠支撑。
2、当前受制于光伏电池材料及其控制算法的不完善,导致光伏发电功率极大程度上被外界环境因素影响,太阳能时常得不到最大利用。且光伏材料短时间内很难取得突破性的进展。光伏阵列在阴影条件下运行时容易陷入多峰值情况,不利于系统运行。
技术实现思路
1、本发明的目的在于针对局部阴影条件下光伏系统运行容易陷入局部最优的情况,提供一种光伏系统最大功率点追踪方法。
2、本发明采用的技术方案是:
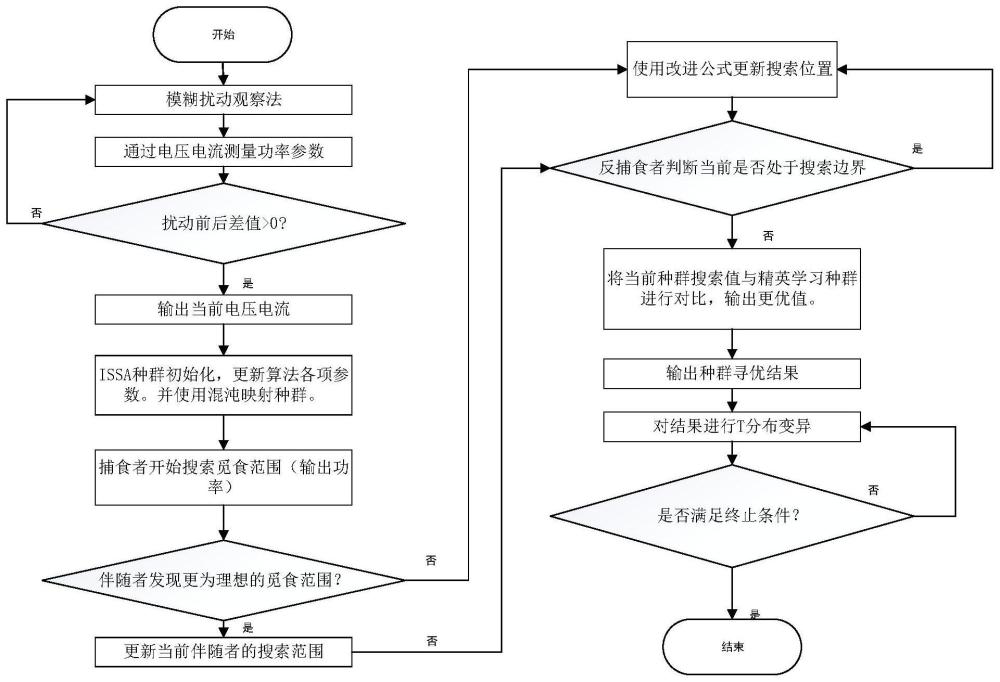
3、一种光伏系统最大功率点追踪方法,其包括以下步骤:
4、步骤1,基模糊扰动观测法(fp&o)追踪到当前系统输出的功率极值点附近的最近点,得到当前功率极值点对应最近点的电压值umpp1与电流值impp1;
5、步骤2,以最近点的电压电流值作为输入参数,利用改进麻雀算法中精准寻优光伏系统的最大功率点;
6、步骤3,判断当前系统输出功率值是否满足终止条件;如果是,当前系统输出功率值不是全局最大功率,停止搜索并执行步骤4;否则,当前系统的输出功率值为全局最大功率点。
7、步骤4,利用混沌映射改变当前麻雀位置,即改变当前系统输出功率值并执行步骤3。
8、具体地,对麻雀种群采用混沌映射,本发明采用的是sinusoidal映射,相比于其他映射,sinusoidal映射在全局遍历和寻优效率上有很大的提高。sinusoidal映射的特性让种群处于较为稳定的状态,倘若算法寻优过程结束时,输出值与目标值相差过大,通过sinusoidal映射让当前麻雀位置发生改变,避免陷入局部最优。改进后的麻雀种群能更迅速的搜索到系统此时系统最大功率点对应最大电压值及最大电流值。若当前麻雀种群处于w1位置,对麻雀种群进行算式处理,将麻雀种群所处位置通过式子操作,为0到1之间的随机数,来映射发现者和追随者的初始空间位置,若麻雀之前所处位置为200m,对应当前寻优功率为200w,通过混沌映射后功率大于200w,若麻雀所处位置陷入局部最优解,对种群进行混沌映射的好处就体现出来,能迅速摆脱当前所处位置,继续进行寻优。
9、进一步地,步骤1具体包括以下步骤:
10、步骤1-1,根据对应步长系数的扰动步长对光伏阵列进行扰动观测,采样光伏系统的输出电压和输出电流,计算与前一次采样的功率差值;
11、步骤1-2,判断功率差值是否大于0;如果是,则下一次扰动方向为正向扰动,即增大当前输入电压,并执行步骤1-3;否则,下一次扰动方向反向扰动,即减小当前输入电压并执行步骤1-3;
12、步骤1-3,判断当前循环次数是否达小于设定次数;如果是,基于功率差值计算调整步长系数并执行步骤1-1;否则,记录当前采样的输出电压电流值,作为功率极值点附近的最近点的电压电流值。
13、进一步地,步骤1-1中引入模糊逻辑因子将数值模糊化以计算与前一次采样的功率差值δp,具体的计算公式如下:
14、
15、其中,p(t)为t时刻的功率值,p(t-1)为t-1时刻的功率值
16、进一步地,步骤1-3中基于功率差值计算调整步长系数的计算公式为:
17、λ=α|δp|
18、其中,λ为调整步长系数,α为步长系数。
19、进一步地,步骤2中改进麻雀算法复合全局混沌与反向精英学习策略提升收敛速度,并以系统最大功率点对应的电压值与电流值计算得到的系统输出功率作为适应度值,以功率最大值为目标函数进行寻优。
20、进一步地,步骤2具体包括以下步骤:
21、步骤2-1,通过光伏阵列的p/v、i/v特性曲线获取最大功率点对应的电压值umpp与电流值impp,
22、步骤2-2,将模糊扰动观测法(fp&o)追踪到的电压值umpp1与电流值impp1相乘得到最近点的功率数值;
23、步骤2-3,以最近点的功率数值为基础,利用改进麻雀算法搜索到的当前寻优功率数值;
24、步骤2-4,将当前寻优功率数值与系统最大功率数值进行比较,判断种群适应度是否陷入对应种群局部最优解值;如果是,则放弃前寻优功率数值并返回步骤2-3再次寻优;否则执行步骤2-5;
25、步骤2-5,将当前寻优功率数值与设置好的精英麻雀种群进行寻优对比,初步判断当前寻优功率数值与最大功率点是否贴近容许范围;如果是,则执行步骤2-7;否则,更新适应度值并执行步骤2-6;
26、步骤2-6,种群迭代次数更新,更新麻雀种群的位置,使得朝着最大功率方向靠拢,利用位置更新公式更新位置,并执行步骤2-4
27、捕食者的位置更新公式为:
28、
29、其中,t是当前运行迭代次数;j是优化目标的维度;imax是迭代的最大次数;α和q为[0,1]之间符合正态分布的随机数;是第t次寻优的麻雀位置,l为全为1的1行j列矩阵。
30、伴随者的位置更新公式为:
31、
32、其中,为本次迭代最低适应度对应位置;a+=at(a·at)-1,a为1行s列的矩阵,矩阵内元素赋值为1或-1;当伴随者数量小于种群数量n/2时,表明当前伴随者处于饥饿状态,搜索范围觅食。伴随者在跟踪过程中监督捕食者,当发现更为优越的觅食范围时,会与捕食者进行争夺,争夺成功,更新位置。争夺失败,继续跟随。
33、反捕食者的位置更新公式为:
34、
35、其中,β是步长系数满足正态分布的[0,1]之间的一个数,用于控制下一次搜索范围的远近,k取值为[-1,1];ε是一个极小值;fi为第i个种群对应的适应度,fg和fi分别对应当前最优适应度值和最差适应度值。
36、步骤2-7,对当前寻优功率数值进行自适应t分布变异操作,判断系统是否处于局部遮蔽条件下;如果是,返回步骤2-6;否则,输出当前寻优功率数值率对应的占空比。
37、步骤2-8,通过占空比来控制boost电路进行电压电流数值控制,达到对光伏阵列的输出功率调节,让光伏阵列稳定运行在最大功率点。
38、进一步地,步骤3具体包括以下步骤:
39、步骤3-1,分别获取系统t时刻的输出功率值pt和t+1时刻的输出功率值pt+1,
40、步骤3-2,计算并判断是否成立;如果是,则当前系统的输出功率值为全局最大功率点;否则,当前系统输出功率值不是全局最大功率停止搜索并执行步骤1。
41、本发明采用以上技术方案,先利用模糊逻辑观察法预先追踪到系统运行的最大功率点附近,后采用改进战争策略算法准确寻找系统当前最大功率点,改进战争策略算法在阴影条件下追踪功率时不易陷入局部最优并及时响应系统的i/v变化。本发明将模糊逻辑扰动与改进麻雀算法复合,系统运行时先采用逻辑扰动观察法迅速跟踪到系统最大功率点附近,利用混沌策略使算法在追踪过程中能有效避免陷入局部最优解,在传统麻雀算法中加入了精英反向学习策略,使得麻雀种群在觅食过程中不会偏离觅食范围很远。本发明利用实时权重使得麻雀种群能够更迅速的追踪到目标函数对应值,使得在psc条件下能迅速的跟踪到全局最大功率点。
本文地址:https://www.jishuxx.com/zhuanli/20240730/197826.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表