一种天车机器人智能控制系统及其控制方法与流程
- 国知局
- 2024-07-31 23:30:31
本发明涉及智能机器人,特别涉及一种天车机器人智能控制系统及其控制方法。
背景技术:
1、基于经典工业机器人实现柔性化,其控制部分主要由三部分组成:一是经典机器人控制器,用于控制工业机器人机械臂的运动;二是西门子等的plc,用于控制机械臂周边的硬件逻辑电路;三是intel等的工控机或者pc,用于处理相机采集的视觉数据,用以引导机器人的运动。
2、基于上述方案的传统智能行车的控制系统如图1所示,该控制系统以天车plc作为核心控制器,控制大车、小车、升降等机构的运动,实现对天车的运动控制;通过视觉处理器实现天车视觉硬件的接入和数据处理;通过地面控制器作为上位机,实现对天车hmi、天车上位机任务的管理。
3、该控制系统为三个子模块的集成方案,存在以下不足:
4、plc多采用西门子的产品,视觉处理器和地面控制器多采用intel工控机或者pc,三个系统之间通过有线或者无线网络相连接,有不确定的通信延迟,命令控制和数据交互的实时性都差;
5、三个系统来自不同的产品体系,需要定义api开发对接,局限性高,开发周期长。
技术实现思路
1、为了实现本发明的上述目的和其他优点,本发明的第一目的是提供一种天车机器人智能控制方法,包括以下步骤:
2、接收智能产线mes系统发送的重物转运指令;
3、将所述重物转运指令拆解为子任务;
4、实时采集视觉视频和三维图像信息;
5、对所述视觉视频和所述三维图像信息进行ai分析,实时识别出天车下方的障碍物和工作人员,更新安全区信息;
6、根据所述安全区信息实时计算行车下一步最优行进路径;
7、根据所述最优行进路径,控制天车x轴和y轴精准行进到任务目标位置;
8、对所述视觉视频和所述三维图像信息进行ai分析,对要操作的目标位置任务进行确认;
9、控制天车z轴升降到精准高度,完成子任务。
10、进一步地,所述视觉视频为rgb视觉视频,所述三维图像信息为激光雷达点云信息。
11、进一步地,所述对所述视觉视频和所述三维图像信息进行ai分析,实时识别出天车下方的障碍物和工作人员包括以下步骤:
12、对天车下方区域进行激光雷达扫描,生成点云信息;
13、再结合工厂场景信息,计算出工厂下方3d空间结构,进行关键物体模型匹配,识别出关键物体精准空间定位坐标;
14、通过rgb视觉视频数据对移动设备进行ai识别,识别出关键物体信息。
15、进一步地,所述控制天车x轴和y轴精准行进到任务目标位置具体为控制天车大车和小车精准行进到任务目标位置。
16、进一步地,所述控制天车z轴升降到精准高度具体为控制天车小车z轴升降到精准高度。
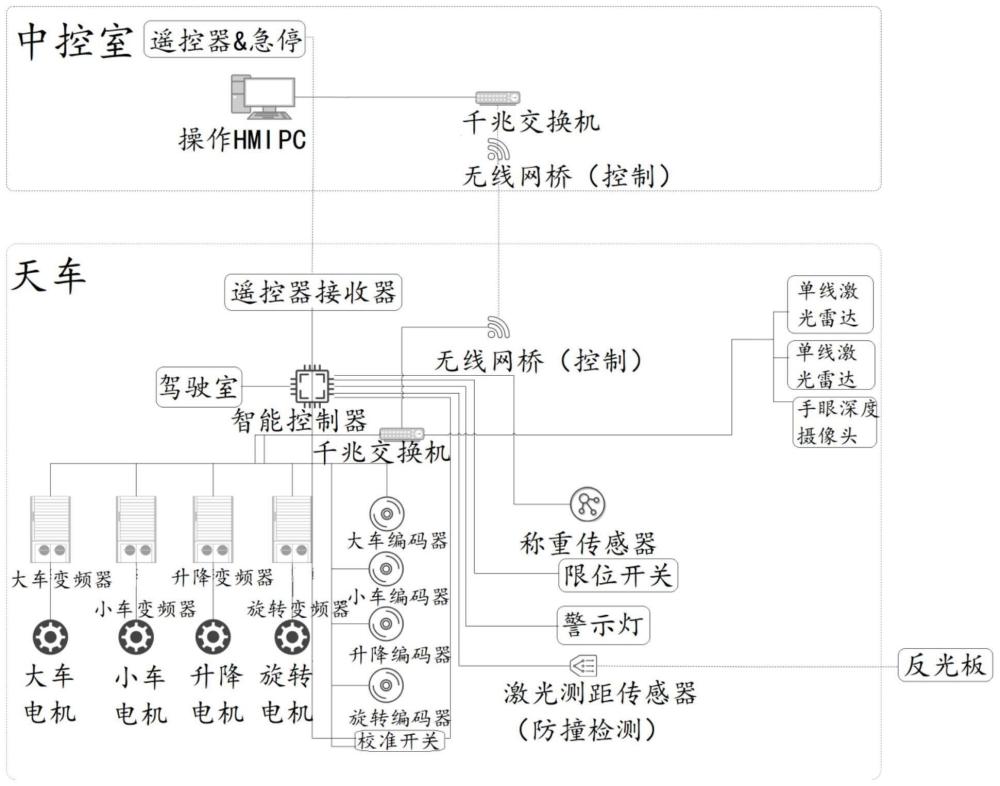
17、本发明的第二目的是提供一种天车机器人智能控制系统,实现上述的方法,包括智能控制器、hmi设备、激光雷达、视觉视频采集模块、大车变频器、小车变频器、升降变频器、旋转变频器、大车编码器、小车编码器、升降编码器、旋转编码器,所述智能控制器与所述hmi设备、所述激光雷达、所述视觉视频采集模块、所述大车变频器、所述小车变频器、所述升降变频器、所述旋转变频器、所述大车编码器、所述小车编码器、所述升降编码器、所述旋转编码器通信连接;
18、所述激光雷达用于三维图像扫描;
19、所述视觉视频采集模块用于采集视觉视频;
20、所述智能控制器用于接收智能产线mes系统发送的重物转运指令,将所述重物转运指令拆解为子任务,对所述视觉视频和所述三维图像信息进行ai分析,实时识别出天车下方的障碍物和工作人员,更新安全区信息,根据所述安全区信息实时计算行车下一步最优行进路径,根据所述最优行进路径,控制天车大车和小车精准行进到任务目标位置,对所述视觉视频和所述三维图像信息进行ai分析,对要操作的目标位置任务进行确认,控制天车小车z轴升降到精准高度,完成子任务。
21、进一步地,所述视觉视频采集模块为rgb工业相机。
22、进一步地,所述智能控制器包括存储器、ai视觉处理器、工业硬盘、系统处理器、通信模块、di/di模块与ai/ao模块,所述存储器用于存储rgb视觉视频、激光雷达点云信息,所述ai视觉处理器用于对所述视觉视频和所述三维图像信息进行ai分析,实时识别出天车下方的障碍物和工作人员,更新安全区信息,所述工业硬盘用于存储系统数据,所述系统处理器用于对系统数据进行出来,所述通信模块用于实现系统通信,所述di/di模块用于实现数字输入和数字输出,所述ai/ao模块用于实现模拟输入和模拟输出。
23、进一步地,所述智能控制器的底层采用rtlinux操作系统,所述rtlinux操作系统上集成有软plc,所述软plc用于实现对天车、大车、小车、吊具的运动控制和安全控制的逻辑抽象;所述rtlinux操作系统上集成有ai视觉处理系统,所述ai视觉处理系统用于处理rgb视觉视频、激光雷达点云信息,以及实现面向天车场景的工作区人员识别、3d空间物体识别;
24、所述智能控制器还包括天车机器人核心框架层,所述天车机器人核心框架层含天车动态路径规划算法,以及天车三维空间管理模型。
25、进一步地,所述智能控制器的对外接口包括硬件抽象层,所述硬件抽象层用于对接不同品牌的天车硬件;
26、所述智能控制器包括对接智能产线mes系统的api接口,所述api接口用于接收智能产线mes系统派发的任务指令,以及将执行状态、执行结果、报警信息,设备状态反馈给智能产线mes系统。
27、与现有技术相比,本发明的有益效果是:
28、本发明提供一种天车机器人智能控制系统及其控制方法,将机器人控制、ai采集分析、逻辑电路控制集成于一体,该控制器基于工业级cpu处理器,在该cpu控制器内实现了视觉数据的处理、机器人运动轨迹规划和控制、以及周边逻辑电路的控制,大大降低了命令和数据交互延迟,提高了天车机器人的工作效率。
29、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。本发明的具体实施方式由以下实施例及其附图详细给出。
技术特征:1.一种天车机器人智能控制方法,其特征在于,包括以下步骤:
2.如权利要求1所述的一种天车机器人智能控制方法,其特征在于:所述视觉视频为rgb视觉视频,所述三维图像信息为激光雷达点云信息。
3.如权利要求2所述的一种天车机器人智能控制方法,其特征在于:所述对所述视觉视频和所述三维图像信息进行ai分析,实时识别出天车下方的障碍物和工作人员包括以下步骤:
4.如权利要求1所述的一种天车机器人智能控制方法,其特征在于:所述控制天车x轴和y轴精准行进到任务目标位置具体为控制天车大车和小车精准行进到任务目标位置。
5.如权利要求4所述的一种天车机器人智能控制方法,其特征在于:所述控制天车z轴升降到精准高度具体为控制天车小车z轴升降到精准高度。
6.一种天车机器人智能控制系统,实现如权利要求1~5任一项所述的方法,其特征在于:包括智能控制器、hmi设备、激光雷达、视觉视频采集模块、大车变频器、小车变频器、升降变频器、旋转变频器、大车编码器、小车编码器、升降编码器、旋转编码器,所述智能控制器与所述hmi设备、所述激光雷达、所述视觉视频采集模块、所述大车变频器、所述小车变频器、所述升降变频器、所述旋转变频器、所述大车编码器、所述小车编码器、所述升降编码器、所述旋转编码器通信连接;
7.如权利要求6所述的一种天车机器人智能控制系统,其特征在于:所述视觉视频采集模块为rgb工业相机。
8.如权利要求7所述的一种天车机器人智能控制系统,其特征在于:所述智能控制器包括存储器、ai视觉处理器、工业硬盘、系统处理器、通信模块、di/di模块与ai/ao模块,所述存储器用于存储rgb视觉视频、激光雷达点云信息,所述ai视觉处理器用于对所述视觉视频和所述三维图像信息进行ai分析,实时识别出天车下方的障碍物和工作人员,更新安全区信息,所述工业硬盘用于存储系统数据,所述系统处理器用于对系统数据进行出来,所述通信模块用于实现系统通信,所述di/di模块用于实现数字输入和数字输出,所述ai/ao模块用于实现模拟输入和模拟输出。
9.如权利要求8所述的一种天车机器人智能控制系统,其特征在于:所述智能控制器的底层采用rtlinux操作系统,所述rtlinux操作系统上集成有软plc,所述软plc用于实现对天车、大车、小车、吊具的运动控制和安全控制的逻辑抽象;所述rtlinux操作系统上集成有ai视觉处理系统,所述ai视觉处理系统用于处理rgb视觉视频、激光雷达点云信息,以及实现面向天车场景的工作区人员识别、3d空间物体识别;
10.如权利要求9所述的一种天车机器人智能控制系统,其特征在于:所述智能控制器的对外接口包括硬件抽象层,所述硬件抽象层用于对接不同品牌的天车硬件;
技术总结本发明提供一种天车机器人智能控制系统及其控制方法,该系统包括智能控制器、HM I设备、激光雷达、视觉视频采集模块、大车变频器、小车变频器、升降变频器、旋转变频器、大车编码器、小车编码器、升降编码器、旋转编码器,智能控制器与HM I设备、激光雷达、视觉视频采集模块、大车变频器、小车变频器、升降变频器、旋转变频器、大车编码器、小车编码器、升降编码器、旋转编码器通信连接。将机器人控制、AI采集分析、逻辑电路控制集成于一体,该控制器基于工业级CPU处理器,在该CPU控制器内实现了视觉数据的处理、机器人运动轨迹规划和控制、以及周边逻辑电路的控制,大大降低了命令和数据交互延迟,提高了天车机器人的工作效率。技术研发人员:李强,肖汉受保护的技术使用者:苏州画睛智能科技有限公司技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240730/197816.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表