一种机器人键槽装配工作站的仿真设计方法
- 国知局
- 2024-07-31 23:35:04
本发明属于机器人仿真装配领域,尤其涉及一种机器人键槽装配工作站的仿真设计方法。
背景技术:
1、工业机器人是工业现代化不可或缺的部分,是集工业自动化为一体的智能设备,大大的加快了生产的效率,和保障工人的安全。
2、因此对计划生产资料进行更合理的分配,对智能生产进行评估,发掘价值的可行性及可能存在的问题更加精确。这种虚拟仿真技术已经成为智能模拟机器人工作站发展的趋势。这些现象对许多新兴行业布置了新的任务和要求,甚至于让旧领域的落寞行业焕发生机。如今,键槽装配需要大量人工、劳动力,工作环境差的缺点越来越突出,企业需要在键槽装配中使用更多的模拟仿真技术,来适应工业机器人发展的潮流。
技术实现思路
1、发明目的:本发明的目的在于提供一种机器人键槽装配工作站的仿真设计方法。以用来节省人工成本,提高制造效率,解放双手保障安全。
2、技术方案:本发明的一种机器人键槽装配工作站的仿真设计方法,包括以下步骤:
3、步骤1、通过robotstudio软件开始仿真,创新空的工作站;
4、步骤2、在工作站中选择机器人类型并设置机器人i/o信号;
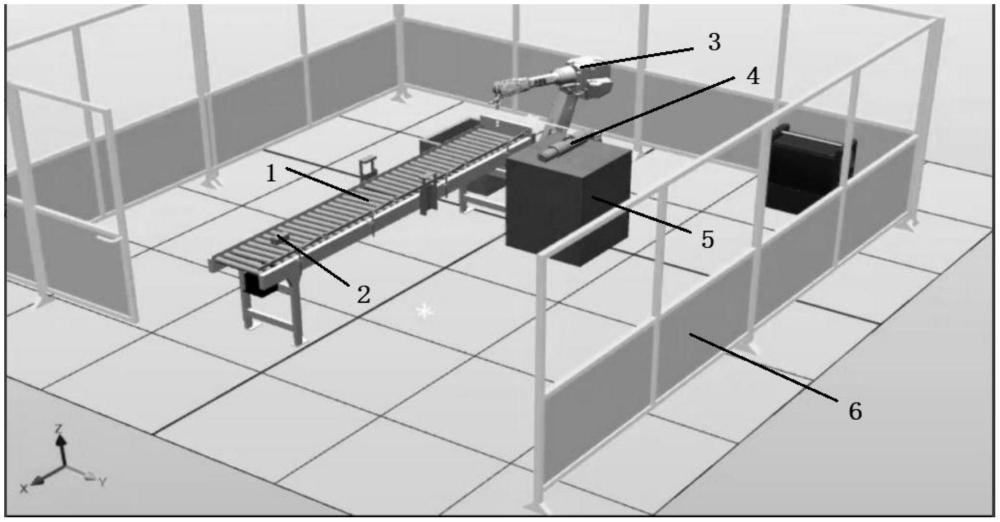
5、步骤3、在工作站中建模收纳盒、待装配的键槽、键帽、y型吸盘、防护围栏、控制柜以及输送系统;
6、步骤4、通过控制柜控制整个工作站,工作时,将键帽从收纳盒中取出通过输送系统传送到机器人处,机器人通过末端的y型吸盘将键帽安装在待装配的键槽上,完成仿真装配。
7、进一步的,步骤2中,所述机器人类型选择irb-2600。
8、进一步的,步骤3中,所述y型吸盘的一端为真空吸盘,用于吸附小型物体,另一端为焊枪,用于焊接固定。
9、进一步的,步骤3中,所述输送系统包括皮带式输送系统,倍速链式输送系统和平顶链式输送系统。
10、进一步的,步骤3中,所述输送系统上设有分隔风格机构和挡停机构,在输送线的每个工位的前方都设计有分隔机构,将输送线上连续排列的工件分隔开,然后再设置挡停装置,工件到达该位置后暂停,完成该工位的装配工艺操作后,系统发出完成信号,打开挡停机构,产品在输送线继续向下一个工位输送。
11、进一步的,步骤3中,所述控制柜的型号选择irc5 single single cabinetcontorller。
12、进一步的,步骤3的具体仿真步骤为:
13、步骤3.1、在工作站创建完成后,创建机器人系统;
14、步骤3.2、设计smart组件、i/o信号的添加和工作站逻辑,完成仿真装配。
15、进一步的,步骤3.2中,所述设计smart组件具体为,在组件内添加:
16、timer,在仿真时,在指定的距离间隔脉冲输出一个数字信号;
17、source,创建一个图形组件的拷贝;
18、planesensor,检测对象与平面相交;
19、logic gate[not],进行数字信号的逻辑运算;
20、linear mover,移动一个对象到一条线上;
21、queue,表示为对象的队列,可作为组进行操纵;
22、attacher,将一个对象安装到另一个对象中;
23、detacher,拆除一个对象;
24、linesensor,检测是否有任何对象与两点之间的线段相交;
25、添加组件后将组件的工作站信号设置一个可由外部输出连接的输入信号,信号类别为数字型,将组件的工作站输入信号与组件的安装激活端相连接,将组件的输出端,安装完成端连接下一个组件的激活端,将后面的安装组件一一相连接,使得输入信号一输入且值是1时,激活安装组件的安装功能,最终将所有的组件都连接成一个安装大块,再将相应的零部件设置到相应的组件中,将信号以及组件之间相互链接起来。
26、进一步的,步骤3.2中,所述i/o信号的添加具体为:在组件内添加一个输入信号di,首先将此信号连接到传感器的激活端,然后把传感器的输出端连接安装组件的激活端;将输入信号di连接非门运算的输入端a口,然后把非门运算的输出端连接拆除组件的激活端,拆除组件的对象要与安装组件的子对象一致,再将相应的零部件设置到相应的组件中,将信号以及组件之间相互链接起来。
27、进一步的,步骤3.2中,所述工作站逻辑具体为:将工作站中smartcompent4的数字输出端连接系统的输入端,分别按顺序进行对应连线。
28、有益效果:与现有技术相比,本发明具有如下显著优点:
29、工业机器人进入工业生产领域,并能不断发展,必有其存在的合理因素,采用工业机器人作业有着许多人工无法比拟的优势。首先,在成本上,在经济不断发展的今天,劳动力所需要的酬劳也越来越多,使用工业机器人恰恰能取代人力的这块不足。在人工费昂贵的今天,工业机器人能参与多个工位的工作,只需有1位或几位工人看管部呵,可大大节省人工成本。
30、另外,工业机器人通过编程设定,往往具有高产出低损耗的特点,不但能提高产品的质量,而且能够使投入的成本得到最大限度的利用,从而实现生产中的低废品率和高产出率。其次,在时间上,机器人的生产效率不同于人工,生产的速度快慢可由人类调控。通过设定,工业机器人在能保证产出质量的前提下,大大缩短单件产品的生产时间。而且工业机器人是无情绪无感官的自动化装备,可真正达到全天工作,充分利用有效时间。最后,工业机器人的使用,使生产工作的安全性得到提高,在某些存在安全隐患的行业,工业机器人能代替人工进行有危险性的工作。
31、工业机器人的优势还是非常明显的,以一台工业机器人为例,打磨效率上至少提高6倍,可以替代5名熟练工,这样核算下来每年最少为企业节约1万工时,按工资算的话一年为企业节省34.5万元。这是最保守的算法,也是最直接的优势,不过这样的优势需要从长远来看才能更明显的体现出来。
32、由于机器人作业可以达到很高的精度,产品良品率将得到大幅提升,产能随即放大。同样由于良品率的提升,原材料的浪费也将减少。产品质量提升,售后维修支出同样将大幅减少,品牌形象也会—并提升。
33、总而言之,工业机器人在工业机械等生产领城得到应用广泛,一定程度上加快了工业生产前进的步伐,同时也使得工业生产变得更加现代化,更加有智慧。相信随着现代科技的不断进步,未来的工业机器人将更好地为工业生产服务,实现工业生产的大踏步前进。
技术特征:1.一种机器人键槽装配工作站的仿真设计方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种机器人键槽装配工作站的仿真设计方法,其特征在于,步骤2中,所述机器人类型选择irb-2600。
3.根据权利要求1所述的一种机器人键槽装配工作站的仿真设计方法,其特征在于,步骤3中,所述y型吸盘的一端为真空吸盘,用于吸附小型物体,另一端为焊枪,用于焊接固定。
4.根据权利要求1所述的一种机器人键槽装配工作站的仿真设计方法,其特征在于,步骤3中,所述输送系统包括皮带式输送系统,倍速链式输送系统和平顶链式输送系统。
5.根据权利要求1所述的一种机器人键槽装配工作站的仿真设计方法,其特征在于,步骤3中,所述输送系统上设有分隔风格机构和挡停机构,在输送线的每个工位的前方都设计有分隔机构,将输送线上连续排列的工件分隔开,然后再设置挡停装置,工件到达该位置后暂停,完成该工位的装配工艺操作后,系统发出完成信号,打开挡停机构,产品在输送线继续向下一个工位输送。
6.根据权利要求1所述的一种机器人键槽装配工作站的仿真设计方法,其特征在于,步骤3中,所述控制柜的型号选择irc5 single single cabinet contorller。
7.根据权利要求1所述的一种机器人键槽装配工作站的仿真设计方法,其特征在于,步骤3的具体仿真步骤为:
8.根据权利要求1所述的一种机器人键槽装配工作站的仿真设计方法,其特征在于,步骤3.2中,所述设计smart组件具体为,在组件内添加:
9.根据权利要求1所述的一种机器人键槽装配工作站的仿真设计方法,其特征在于,步骤3.2中,所述i/o信号的添加具体为:在组件内添加一个输入信号di,首先将此信号连接到传感器的激活端,然后把传感器的输出端连接安装组件的激活端;将输入信号di连接非门运算的输入端a口,然后把非门运算的输出端连接拆除组件的激活端,拆除组件的对象要与安装组件的子对象一致,再将相应的零部件设置到相应的组件中,将信号以及组件之间相互链接起来。
10.根据权利要求1所述的一种机器人键槽装配工作站的仿真设计方法,其特征在于,步骤3.2中,所述工作站逻辑具体为:将工作站中smartcompent4的数字输出端连接系统的输入端,分别按顺序进行对应连线。
技术总结本发明公开了一种机器人键槽装配工作站的仿真设计方法,包括1、通过RobotStudio软件开始仿真,创新空的工作站;2、在工作站中选择机器人类型并设置机器人I/O信号;3、在工作站中建模收纳盒、待装配的键槽、键帽、Y型吸盘、防护围栏、控制柜以及输送系统;4、通过控制柜控制整个工作站,工作时,将键帽从收纳盒中取出通过输送系统传送到机器人处,机器人通过末端的Y型吸盘将键帽安装在待装配的键槽上,完成仿真装配。本发明可以用来节省人工成本,提高制造效率,解放双手保障安全。技术研发人员:王天宇,刘美天,薄海,邱威,张峰,朱为国受保护的技术使用者:淮阴工学院技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240730/197917.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。