有限识别范围下无人船多目标遍历的巡航方法
- 国知局
- 2024-07-31 23:35:06
本发明涉及无人船路径规划领域,更具体地说,涉及一种有限识别范围下无人船多目标遍历的巡航方法。
背景技术:
1、现有无人船往往采用雷达等探测方法,其识别范围有限,尚不能明确识别范围以外的区域目标和阻碍物的分布情况。在某些应用场景下,需要无人船在有限的识别范围下,不仅要探索全局,且需要遍历和到达多个目标点,同时要进行阻碍物的避让。现有方法大都采用人为遥控或者设定固定路线巡航的方法,无人船依据人为划定的固定路线进行巡航,若遇到目标则前往到达再按原路线返回,若遇到阻碍物则保持一定的距离回避。此种方法存在路线冗长、区域遗漏和难于动态避障等问题。
2、人工势场法是由khatib提出的一种机器人路径规划算法。该算法将目标和阻碍物分别看做对机器人有牵引作用和排斥作用的物体,机器人沿牵引作用与排斥作用的合力来进行运动。
3、栅格法是地图建模的一种方法,将地图划分成小方格的集合,相当于将场景的所有事物进行二值化替代,阻碍物为1,非阻碍物为0。现有的探测方法存在以下问题:(1)无人船在有限识别范围下如何搜索全局并遍历多目标的问题;(2)现有固定路线巡航等技术存在的路线冗长、区域遗漏和不能动态避障等问题;(3)传统虚拟作用力法的“死锁”即无人船卡死问题。
技术实现思路
1、本发明要解决的技术问题在于,提供一种有限识别范围下无人船多目标遍历的巡航方法,其能够使无人船在有限的识别范围下更自主高效的进行全局搜索和多目标的遍历,实现了动态避障,减少了路线冗余。
2、本发明解决其技术问题所采用的技术方案是:构造一种有限识别范围下无人船多目标遍历的巡航方法,包括以下步骤:
3、s1、无人船通过gps和雷达装置获取地图大小和边界;
4、s2、无人船采用栅格法划分地图,取每个栅格的中心坐标再组成新的坐标地图;
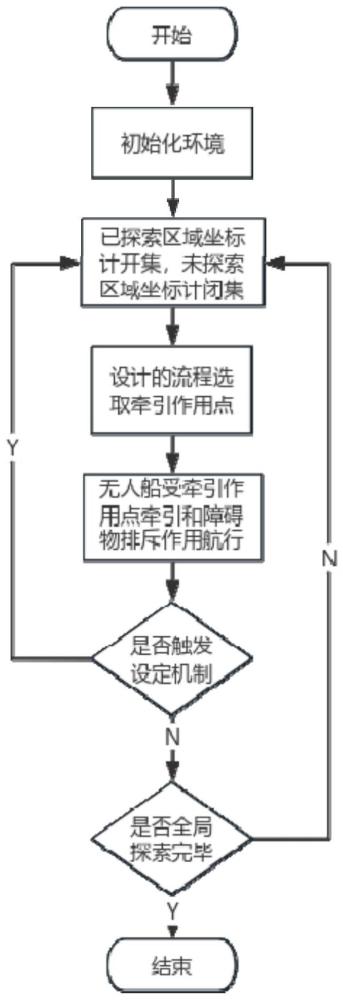
5、s3、无人船绘算已探索的区域;
6、s4、无人船依据设定的流程选取牵引作用点,并依据设定的触发机制进行牵引作用点的重设;
7、s5、无人船受构造的牵引作用点的牵引作用,阻碍物的排斥作用的综合影响进行航行;
8、s6、判断是否到达牵引作用点并完成全局的探索,如否则进入步骤s3进行循环,直到完成全局的探索和所有目标的遍历。
9、按上述方案,所述步骤s2中,根据实际场景的应用需求,设定栅格的大小,并划分地图,将划分后的每个栅格的中心坐标计入总的数据集,按其坐标位置排序,组成新的坐标地图。
10、按上述方案,所述步骤s3中,无人船通过以下方式绘算已探索区域:将已走过的路径与自身识别范围的半径r进行相乘的积分运算,得出已探索的坐标,将已探索的坐标节点计入计算机数据的开集,未探索区域的坐标计入计算机数据的闭集。
11、按上述方案,所述步骤s4中,无人船牵引作用点的选取包括以下步骤:
12、s401、以最近的未探索边界坐标为起算点;
13、s402、以起算点所包含的无人船识别范围的圆内的坐标作为可能的牵引作用点;
14、s403、比较并选出以之为圆心作无人船识别范围的圆内能覆盖最多未探索坐标的可能的牵引作用点作为最终选取的牵引作用点。
15、按上述方案,所述步骤s5中,无人船依据以下设定的触发机制进行牵引作用点的重设:
16、s501、无人船识别到目标,则立即重设目标为牵引作用点;使得无人船能够在搜索到目标后立刻前往并到达目标;
17、s502、无人船到达牵引作用点;
18、s503、无人船已经完成对选定的牵引作用点以无人船识别范围的圆所能覆盖的未探索坐标的探索;避免无人船在完成了对选定范围内的探索还继续进行不必要的航行;
19、s504、检测到无人船卡死不动;当无人船检测到自身速度为0时,则立刻根据新的已探索坐标和未探索坐标情况进行牵引作用点的重设。
20、按上述方案,所述无人船受牵引作用点的牵引进行探索或目标的到达,同时受到阻碍物的排斥进行避障,无人船受到的合力为:
21、
22、式中:fsum为无人船所受合力,fa(q)为目标点牵引作用,为m个阻碍物的排斥作用。
23、牵引作用的定义为:
24、fa(q)=kρ(q,qarea);
25、式中:fa(q)为牵引作用,k为牵引作用增益系数,ρ(q,qarea)为无人船与目标的距离;
26、排斥作用的定义为:
27、
28、式中:fr(q)为排斥作用,n为排斥作用增益系数,ρ(q,qobs)为无人船与阻碍物的距离,ρ0为阻碍物作用范围。离开作用范围ρ0,无人船不受到阻碍物的排斥作用。
29、实施本发明的有限识别范围下无人船多目标遍历的巡航方法,具有以下有益效果:
30、1、本发明提供的一种有限识别范围下无人船多目标的遍历方法,使得无人船可以用相比现有方法更短的路线,探索全局并遍历多目标,实现了动态避障,避免了区域遗漏;
31、2、本发明设计的无人船依据设定的机制进行牵引作用点的重设,避免多余的航行,并在识别到目标后立刻前往目标;
32、3、本发明设计的无人船在检测到自身卡死后会根据新的已探索和未探索区域坐标重新选取牵引作用点并受力航行,避免出现“死锁”现象。
技术特征:1.一种有限识别范围下无人船多目标遍历的巡航方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的有限识别范围下无人船多目标遍历的巡航方法,其特征在于,所述步骤s2中,根据实际场景的应用需求,设定栅格的大小,并划分地图,将划分后的每个栅格的中心坐标计入总的数据集,按其坐标位置排序,组成新的坐标地图。
3.根据权利要求2所述的有限识别范围下无人船多目标遍历的巡航方法,其特征在于,所述步骤s3中,无人船通过以下方式绘算已探索区域:将已走过的路径与自身识别范围的半径r进行相乘的积分运算,得出已探索的坐标,将已探索的坐标节点计入计算机数据的开集,未探索区域的坐标计入计算机数据的闭集。
4.根据权利要求1所述的有限识别范围下无人船多目标遍历的巡航方法,其特征在于,所述步骤s4中,无人船牵引作用点的选取包括以下步骤:
5.根据权利要求1所述的有限识别范围下无人船多目标遍历的巡航方法,其特征在于,所述步骤s5中,无人船依据以下设定的触发机制进行牵引作用点的重设:
6.根据权利要求5所述的有限识别范围下无人船多目标遍历的巡航方法,其特征在于,所述无人船受牵引作用点的牵引进行探索或目标的到达,同时受到阻碍物的排斥进行避障,无人船受到的合力为:
技术总结本发明涉及一种有限识别范围下无人船多目标遍历的巡航方法,包括以下步骤:S1、无人船通过GPS和雷达装置获取地图大小和边界;S2、无人船采用栅格法划分地图,取每个栅格的中心坐标再组成新的坐标地图;S3、无人船绘算已探索的区域;S4、无人船依据设定的流程选取牵引作用点,并依据设定的触发机制进行牵引作用点的重设;S5、无人船受构造的牵引作用点的牵引作用,阻碍物的排斥作用的综合影响进行航行;S6、判断是否到达牵引作用点并完成全局的探索,如否则进入步骤S3进行循环,直到完成全局的探索和所有目标的遍历。本发明使得无人船可以用相比现有方法更短的路线,探索全局并遍历多目标,实现了动态避障,避免了区域遗漏。技术研发人员:张进峰,张善荣,邢欧文,许泽耀,陈曲舒,吴长一,王海强,曹丰智受保护的技术使用者:武汉理工大学技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240730/197923.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。