一种二氧化碳捕集系统的改进自抗扰控制算法的定量化参数整定方法
- 国知局
- 2024-07-31 23:36:43
本发明涉及化工控制领域,尤其是针对一种二氧化碳捕集系统的改进自抗扰控制算法的定量化参数整定方法。
背景技术:
1、自抗扰控制算法由于其结构简单,具有良好的控制性能和抑制扰动的等优点得到广泛的关注和应用。自抗扰控制算法因其自身的控制特性,被应用于能源系统、机器人系统、航空航天系统、船舶系统等不同领域。
2、然而在化工过程过程控制中存在着一类滞后的过程,比如化工过程中的二氧化碳捕集系统和精馏控制系统等,一般可采用一类惯性系统进行描述其中s和k分别表示微分算子和系统增益,t1、t2、t3和t4表示时间常数,y(s)和u(s)分别为系统的输出和输入;以二氧化碳捕集系统为例,上式中各参数的含义为:输出y(s)是二氧化碳捕集系统的捕集率,输入u(s)是二氧化碳捕集系统的贫胺液流量,增益系数k是指系统对输入值的放大倍数。针对大滞后过程,中国专利申请cn202210383668.3和中国专利cn201810041569.0均提出一种适用于形如所示的改进自抗扰控制算法,然而化工过程中的二氧化碳捕集系统和精馏控制系统的传递函数与上述两发明中所涉及的系统不同,存在着两个零点,由于t1、t2、t3和t4数值不同,该类惯性系统的动态特性可能较快或者较慢,而上述两发明中所涉及的系统是典型的大惯性过程,其动态特性较慢,该方法对于化工过程中的二氧化碳捕集系统和精馏控制系统的应用具有局限性。
3、针对形如的二氧化碳捕集系统和精馏控制系统,需要提供一种定量化参数整定方法,以提高其控制品质,并能够通过定量化参数整定公式快速得到设计的自抗扰控制算法参数,从而大大降低其工程应用的难度。
技术实现思路
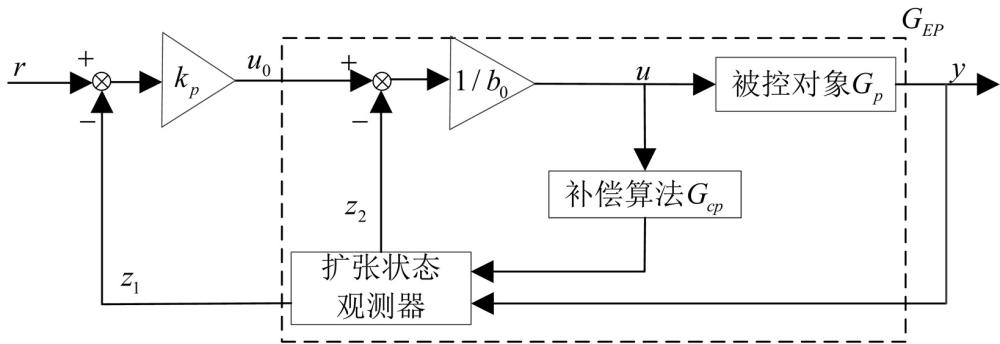
1、本发明针对一类具有惯性过程的二氧化碳捕集系统提供了一种改进自抗扰控制算法的定量化参数整定方法,通过引入补偿算法对控制量进行调节,实现闭环系统的有效控制;通过设计改进自抗扰控制算法,能够得到闭环系统的动态方程,从而直接计算得到一种改进自抗扰控制算法的参数。本发明将提出的改进自抗扰控制算法的参数进行定量化计算,能够改善闭环系统的控制性能,实现对二氧化碳捕集系统的灵活捕集,也可为解决一类惯性过程系统中的工程应用提供支撑。
2、本发明第一方面提出了一种二氧化碳捕集系统的改进自抗扰控制算法的定量化参数整定方法,包括以下步骤:
3、(1)描述二氧化碳捕集系统;
4、对二氧化碳捕集系统采用惯性系统进行描述,其数学表达式为:
5、
6、其中,输出y(s)是二氧化碳捕集系统的捕集率,输入u(s)是二氧化碳捕集系统的贫胺液流量,s和k分别表示微分算子和惯性系统的增益,t1、t2、t3和t4表示时间常数;
7、为设计一阶自抗扰控制算法,将描述的二氧化碳捕集系统表达式改写为:
8、
9、其中,x=[x1 x2]t=[y f]t是二氧化碳捕集系统的状态变量;u是二氧化碳捕集系统的控制量,即二氧化碳捕集系统的贫胺液流量;y是二氧化碳捕集系统的输出,即二氧化碳捕集系统的捕集率;f定义为二氧化碳捕集系统的总扰动;c=[0 1],输入增益
10、(2)设计补偿算法,其数学表达式为:
11、
12、其中,ucp表示补偿算法的输出;
13、补偿算法的状态空间表达式如下:
14、
15、(3)基于改写后的二氧化碳捕集系统和补偿算法设计扩张状态观测器,表达式如下:
16、
17、其中z=[z1 z2]t是观测器的状态向量,l=[β1 β2]t是观测器的增益向量,通过参数带宽法得到观测器的增益向量为:
18、β1=2ωo,
19、其中,ωo表示扩张状态观测器算法的带宽,ωo越大表示扩张状态观测器算法的观测能力越强,ωo越小表示扩张状态观测器算法的观测能力越弱,ωo的取值范围为[0.01,100];
20、(4)基于得到的观测器的状态向量,设计反馈控制律:
21、
22、其中,r=[r 0]是二氧化碳捕集系统捕集率的设定值,kc=[kp 1]是控制增益,kp是比例系数;u0为设计的自抗扰控制算法的虚拟控制量;
23、(5)将设计的状态观测器进行拉普拉斯变换,即:
24、
25、结合设计的补偿算法,得到控制量u(s)和输出y(s)到跟踪值z2(s)的传递函数,其数学表达式为:
26、
27、进而得到u0到y的传递函数gep(s),其表达式为:
28、
29、(6)基于拉普拉斯变换后得到的传递函数gep(s),根据终值定理得到如下:
30、
31、将传递函数gep(s)近似为如下积分环节:
32、
33、其中,
34、(7)基于反馈控制律和传递函数gep(s)的近似传递函数,得到二氧化碳捕集系统的等效闭环动态方程,其表达式如下:
35、
36、其中,表示动态方程的时间常数;
37、(8)基于描述的二氧化碳捕集系统表达式,以及动态方程的时间常数有如下等式:
38、
39、得到反馈控制律中比例系数的表达式:
40、
41、其中,ωc是反馈控制律带宽;λ表示预期动态方程的可调因子,λ越大表示闭环系统动作越慢,λ越小表示闭环系统动作越快,λ的取值范围为[0.1,10];
42、(9)通过选择λ,结合描述的二氧化碳捕集系统的表达式,以及定量化参数计算公式计算得到自抗扰控制算法的参数,定量化参数整定表达式:
43、
44、结合计算得到的自抗扰控制算法的参数,二氧化碳捕集系统捕集率的设定值,以及二氧化碳捕集系统的捕集率和控制量,通过自抗扰控制算法对二氧化碳捕集系统的贫胺液流量进行调节,即可实现对二氧化碳捕集系统捕集率的高质量控制。
45、本发明第二方面提供了一种二氧化碳捕集系统的改进自抗扰控制算法的定量化参数整定系统,包括:二氧化碳捕集系统,用于进行补偿算法计算的补偿计算器,用于进行反馈控制律计算的控制律计算器和用于进行扩张状态观测器算法计算的扩张状态观测器;
46、所述控制律计算器、所述补偿计算器、所述扩张状态观测器和所述二氧化碳捕集系统通信连接,用以实现所述的二氧化碳捕集系统的改进自抗扰控制算法的定量化参数整定方法。
47、本发明第三方面提供了一种设备,包括:
48、一个或多个处理器;
49、存储器,用于存储一个或多个程序,
50、当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器执行如所述的二氧化碳捕集系统的改进自抗扰控制算法的定量化参数整定方法。
51、本发明第四方面提供了一种存储有计算机程序的计算机可读存储介质,该程序被处理器执行时实现所述的二氧化碳捕集系统的改进自抗扰控制算法的定量化参数整定方法。
52、本发明的特点及优势在于:
53、本发明针对二氧化碳捕集系统存在的多零点和多极点特性带来的控制性能下降难点,提出了一种改进自抗扰控制算法,能够通过定量化参数整定表达式直接计算得到所提出的改进自抗扰控制算法的参数,本发明提出的改进自抗扰控制设计及定量化参数整定方法能够兼顾较好的二氧化碳捕集系统跟踪能力与抗干扰能力,提高控制品质,并且降低了参数整定的难点,定量化参数整定表达式对于改进自抗扰控制算法在二氧化碳捕集系统中的广泛应用具有极大的促进作用。
本文地址:https://www.jishuxx.com/zhuanli/20240730/197963.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表