一种基于操控性能辨识的前馈加反馈轨迹跟踪控制方法与流程
- 国知局
- 2024-07-31 23:40:17
本发明属于底盘控制,涉及一种基于底盘横纵操控性能辨识结果进行前馈控制加上基于速度和侧向位置反馈控制的复合轨迹跟踪方法,更具体地说,涉及一种基于操控性能辨识的前馈加反馈轨迹跟踪控制方法。
背景技术:
1、轨迹跟踪是无人驾驶实现的最基础一环,其控制性能影响着无人驾驶的效果。当前轨迹跟踪方法主要分为横纵耦合控制方法和横纵解耦控制方法,横纵耦合控制方法常采用多输入多输出控制算法,如基于模型的二次型调节器控制或模型预测控制;横纵解耦控制方法则常采用多个单输入单输出控制算法,将横纵方向分别采用不同的控制算法同时实现控制。横纵解耦控制方法可以将先进的控制思想和控制算法引入轨迹跟踪问题中,打破基于模型的多输入多输出控制算法应用的局限性。但是,当前的横纵解耦轨迹跟踪控制方法多直接采用通用型的基于状态反馈的控制方法,将控制量指令下发给被控底盘后默认其被完全执行,但受限于系统特性,控制量指令难以被完全执行;当被控对象改变或特性变化以及发生强烈干扰时,上述方法无法从容应对,控制效果将大打折扣;针对不同被控对象的匹配度不高。如何提升横纵解耦轨迹跟踪控制方法在针对不同被控对象时的匹配性、鲁棒性和控制效果,成为该领域的重要方向。
技术实现思路
1、为解决上述问题,本发明提供了一种基于操控性能辨识的前馈加反馈轨迹跟踪控制方法,旨在通过基于横纵操控性能辨识建立的底盘逆动力学拟合模型获得前馈控制量以提升控制器的响应速度和对不同被控对象的匹配性,叠加基于状态误差的反馈控制量修正以实现更高精度的轨迹跟踪控制效果,横纵双向的前馈加速度反馈闭环校正控制将提升系统的鲁棒性和抗干扰能力。
2、本发明的技术方案是:一种基于操控性能辨识的前馈加反馈轨迹跟踪控制方法,它包括基于底盘横纵操控性能辨识的底盘逆动力学拟合模型建模、纵向速度前馈和反馈控制量求取、基于预瞄思想的横摆角速度前馈和反馈控制量求取、横纵控制量执行和状态反馈过程。本发明的步骤如下:
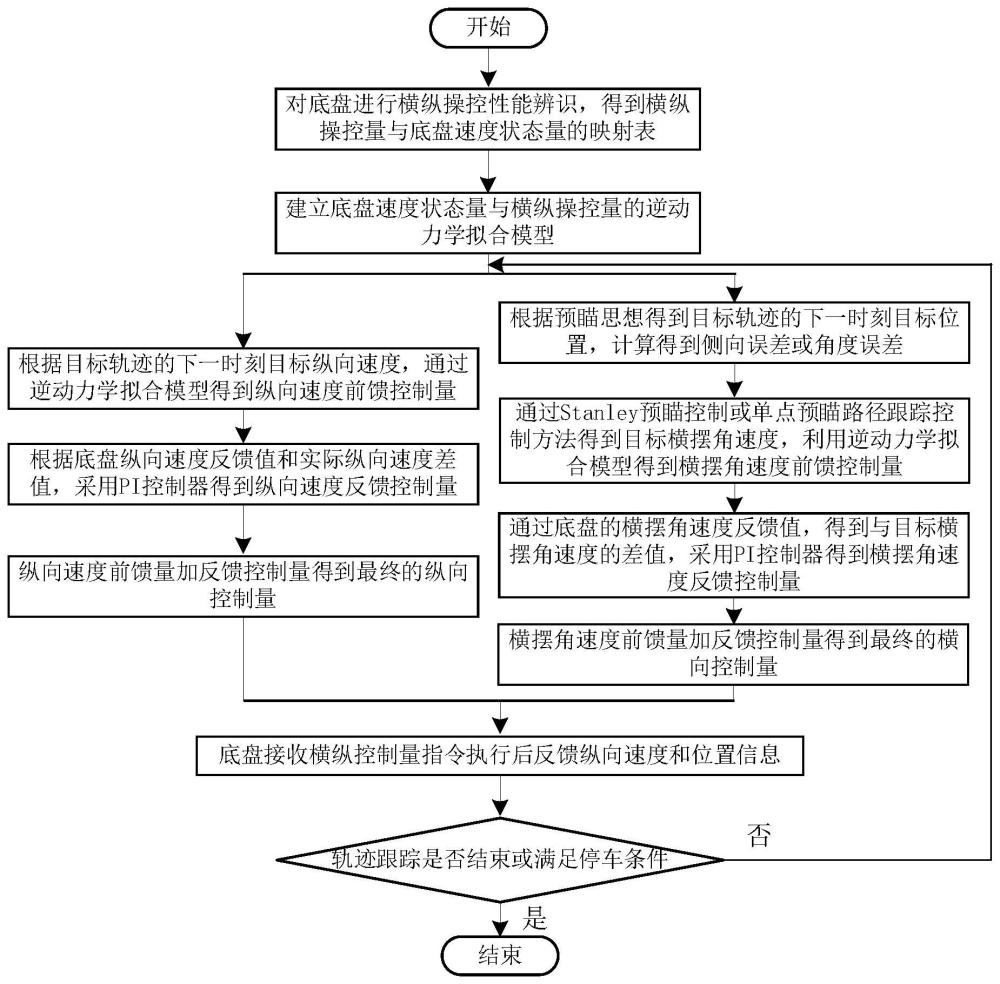
3、第一步,对底盘进行横纵操控性能辨识,得到横纵操控量与底盘速度状态量的映射表;
4、第二步,建立底盘速度状态量与横纵操控量的逆动力学拟合模型;
5、第三步,纵向方向:根据目标轨迹的下一时刻目标纵向速度,通过逆动力学拟合模型得到纵向速度前馈控制量;横向方向:根据预瞄思想得到目标轨迹的下一时刻目标位置,计算得到侧向误差或角度误差;
6、第四步,纵向方向:根据底盘纵向速度反馈值和目标纵向速度差值,采用pi控制器得到纵向速度反馈控制量;横向方向:通过stanley预瞄控制或单点预瞄路径跟踪控制方法得到目标横摆角速度,利用逆动力学拟合模型得到横摆角速度前馈控制量;
7、第五步,纵向方向:纵向速度前馈量加反馈控制量得到最终的纵向控制量;横向方向:通过底盘的横摆角速度反馈值,得到与目标横摆角速度的差值,采用pi控制器得到横摆角速度反馈控制量;
8、第六步,横向方向:横摆角速度前馈量加反馈控制量得到最终的横向控制量;
9、第七步,底盘接收横纵控制量指令执行后反馈纵向速度和位置信息;
10、第八步,判断轨迹跟踪是否结束或满足停车条件,如果轨迹跟踪未结束或不满足停车条件,则返回第三步循环执行;反之,则结束。
技术特征:1.一种基于操控性能辨识的前馈加反馈轨迹跟踪控制方法,其特征在于,所述的方法包括以下步骤:
技术总结本发明公开了一种基于操控性能辨识的前馈加反馈轨迹跟踪控制方法,为了灵活引用先进的路径跟踪控制思想和控制算法,提升控制方法与被控对象的适配性以及提升控制量指令的执行程度,提出的基于横纵操控性能辨识的前馈加反馈轨迹跟踪控制方法包括基于底盘横纵操控性能辨识的底盘逆动力学拟合模型建模、纵向速度前馈和反馈控制量求取、基于预瞄思想的横摆角速度前馈和反馈控制量求取、横纵控制量执行和状态反馈过程。本发明适用于无人驾驶或辅助驾驶领域的底盘控制开发领域,方法简洁、工程实用性强,增强了基本路径跟踪控制器对被控底盘的匹配性,提升系统的鲁棒性的同时实现了更高精度的轨迹跟踪控制效果。技术研发人员:代昌华,赵凯,庞明喜,王志航,卢永超,胡江峰,刘保荣,李胤受保护的技术使用者:西北机电工程研究所技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240730/198006.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。