一种基于重心坐标的三维分布式编队控制方法
- 国知局
- 2024-07-31 23:36:50
本发明涉及多智能系统控制,具体涉及一种基于重心坐标的三维分布式编队控制方法。
背景技术:
1、随着信息通信技术的发展,多智能体系统在农业生产、自动驾驶和交通控制、军事和国防以及工业自动化等领域获得了广泛的应用,多智能体系统在这些领域中的应用不仅提高了效率,还有助于减少人员风险、优化资源利用和推动技术创新。编队控制是多智能体系统中的一个重要领域,其主要目标是协调多个智能体,使它们能够在空间中形成特定的队形或布局,并以一种协同的方式完成共同的任务。
2、目前,大多数编队控制系统在完成任务时需要测量大量信息,例如距离、位置和加速度等,这导致编队系统需要配备多种传感器,大大提高了使用成本。即使在仅需要距离信息的编队控制中,也通常需要分析各智能体之间的通信拓扑图刚性以保证最终形成编队形状的唯一性。然而,随着智能体数量的增加,分析图形刚性的难度急剧增加,可能导致最终形成的编队形状与预期不符。
技术实现思路
1、针对现有技术中的上述不足,本发明提供了一种基于重心坐标的三维分布式编队控制方法,利用智能体之间的相对距离完成编队任务,从而避免最终形成的编队形状与预期形状不符,解决了编队控制系统中传感器使用成本高以及分析智能体关系时出现的不一致性问题。
2、为了达到上述发明目的,本发明采用的技术方案为:
3、一种基于重心坐标的三维分布式编队控制方法,包括以下步骤:
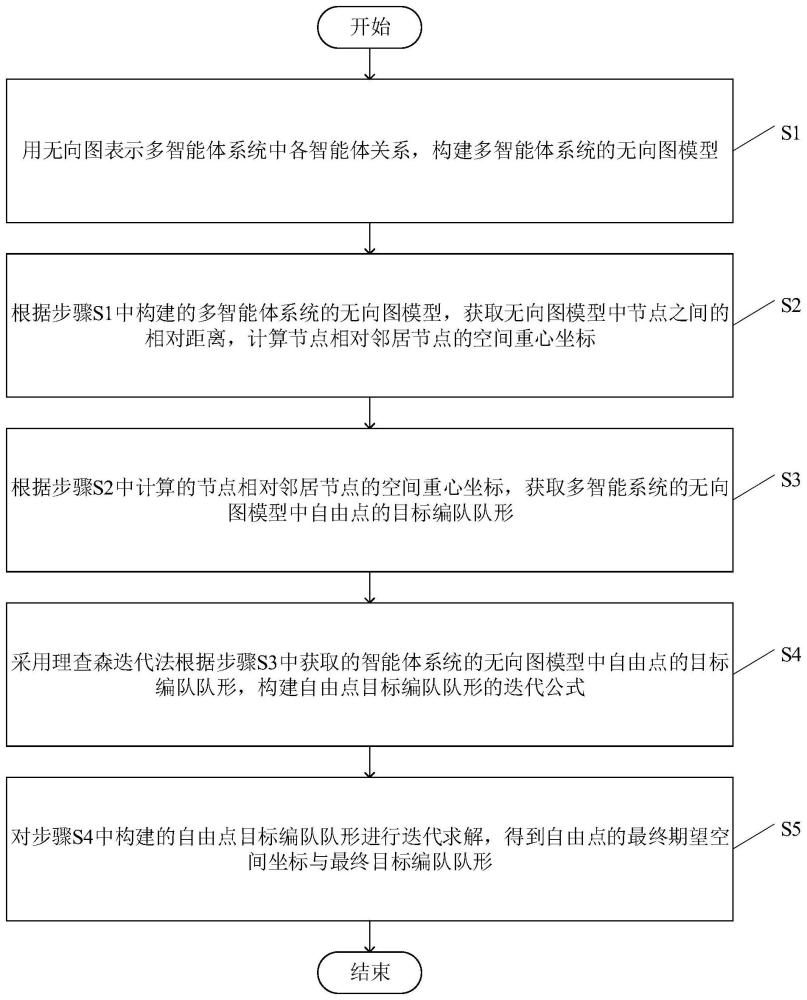
4、s1、用无向图表示多智能体系统中各智能体关系,构建多智能体系统的无向图模型;
5、s2、根据步骤s1中构建的多智能体系统的无向图模型,获取无向图模型中节点之间的相对距离,计算节点相对邻居节点的空间重心坐标;
6、s3、根据步骤s2中计算的节点相对邻居节点的空间重心坐标,获取多智能系统的无向图模型中自由点的目标编队队形;
7、s4、采用理查森迭代法根据步骤s3中获取的智能体系统的无向图模型中自由点的目标编队队形,构建自由点目标编队队形的迭代公式;
8、s5、对步骤s4中构建的自由点目标编队队形进行迭代求解,得到自由点的最终期望空间坐标与最终目标编队队形。
9、本发明具有以下有益效果:
10、本发明所提出的一种基于重心坐标的三维分布式编队控制方法,仅利用各智能体之间的相对距离完成编队任务,减少了编队控制系统中传感器的配备,节省了资源与成本,并且避免了大量传感器带来的精度不准确的缺点,从而避免了最终目标编队队形与预期编队队形不符;此外,也避免了对交互图的刚性分析,仅利用距离进行编队控制,使得编队更容易实现且适用于更加复杂的编队控制系统。
技术特征:1.一种基于重心坐标的三维分布式编队控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于重心坐标的三维分布式编队控制方法,其特征在于,步骤s1具体包括:
3.根据权利要求1所述的基于重心坐标的三维分布式编队控制方法,其特征在于,步骤s2具体包括:
4.根据权利要求1所述的基于重心坐标的三维分布式编队控制方法,其特征在于,步骤s3具体包括:
5.根据权利要求1所述的基于重心坐标的三维分布式编队控制方法,其特征在于,步骤s4具体包括:
6.根据权利要求5所述的基于重心坐标的三维分布式编队控制方法,其特征在于,步骤s43中自由点目标编队队形的迭代公式为:
7.根据权利要求5所述的基于重心坐标的三维分布式编队控制方法,其特征在于,步骤s43中自由点目标编队队形的收敛条件为:
8.根据权利要求1所述的基于重心坐标的三维分布式编队控制方法,其特征在于,步骤s5具体包括:
9.根据权利要求8所述的基于重心坐标的三维分布式编队控制方法,其特征在于,步骤s51中初始时刻自由点i的期望空间坐标的计算公式为:
技术总结本发明涉及多智能系统控制技术领域,公开了一种基于重心坐标的三维分布式编队控制方法,包括以下步骤:构建多智能体系统的无向图模型;获取无向图模型中节点之间的相对距离,计算节点相对邻居节点的空间重心坐标,并获取多智能系统的无向图模型中自由点的目标编队队形;采用理查森迭代法根据智能体系统的无向图模型中自由点的目标编队队形,构建自由点目标编队队形的迭代公式;对自由点目标编队队形进行迭代求解,得到自由点的最终期望空间坐标与最终目标编队队形;该方法仅利用各智能体之间的相对距离完成编队任务,减少了编队控制系统中传感器的配备,节省了成本,避免了大量传感器带来的精度问题导致的最终目标编队队形与预期编队队形不符。技术研发人员:李方圆,宁嘉陵,辛健斌,秦家虎,刘艳红受保护的技术使用者:郑州大学技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240730/197984.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表