全姿态惯性稳定平台防失稳的鲁棒指数稳定控制方法
- 国知局
- 2024-07-31 23:36:47
本发明属于惯性测量系统领域,具体是全姿态惯性稳定平台防失稳的鲁棒指数稳定控制方法。
背景技术:
1、惯性平台稳定控制系统由于受力、热、磁等多物理场的影响,存在一定的不确定性与干扰。传统的校正方法控制动态性能和抗干扰性能较差,因此,研究该系统中惯性平台的稳定控制、提升抗扰能力极为重要。
2、另外,设备长期使用过程中的部件磨损以及设备不同的工作环境,都将导致系统参数的变化,会给一类基于平台参数设计的控制器在进行高性能稳定控制的时候带来不可忽视的影响,因此,控制系统需要定期调节部分控制器的参数甚至所有参数。
3、惯性稳定平台控制系统的长期自适应能力和鲁棒性能也是一个极具实际意义的问题。稳定平台保持惯性基准稳定,稳态精度和动态响应能力都将直接影响该系统的精度。然而,各种系统力热磁等多物理场环境以及外部扰动的存在,使惯性稳定平台的稳定控制和动态响应性能受到影响,甚至导致整体系统的不稳定。
4、为此,稳定回路控制器需要具备抗干扰能力和鲁棒稳定性,研究惯性平台稳定回路的防失稳控制与抗扰能力极为重要。传统的校正控制动态性能和抗干扰性能较差,亟需提出一种鲁棒指数稳定控制方法,保证状态初值不为零时,可以考虑对象参数波动及扰动仍然使得稳定回路控制系统具有快速响应,对参数变化及扰动不灵敏等优点,使得稳定回路具有鲁棒防失稳能力。
5、因此,惯性平台稳定回路防失稳控制方法,对于实现惯性平台控制系统的长期自适应能力和鲁棒性能至关重要。
技术实现思路
1、考虑惯性平台稳定回路受力热磁等多物理场影响的不确定性与干扰,提出全姿态惯性稳定平台防失稳的鲁棒指数稳定控制方法,保证状态初值不为零时,系统全过程的强鲁棒性。弱化初始条件对动态性能的影响,惯性平台任何位置都可实现防失稳的鲁棒指数稳定,提高四轴三框架全姿态惯性稳定平台控制系统的高动态跟踪性能。
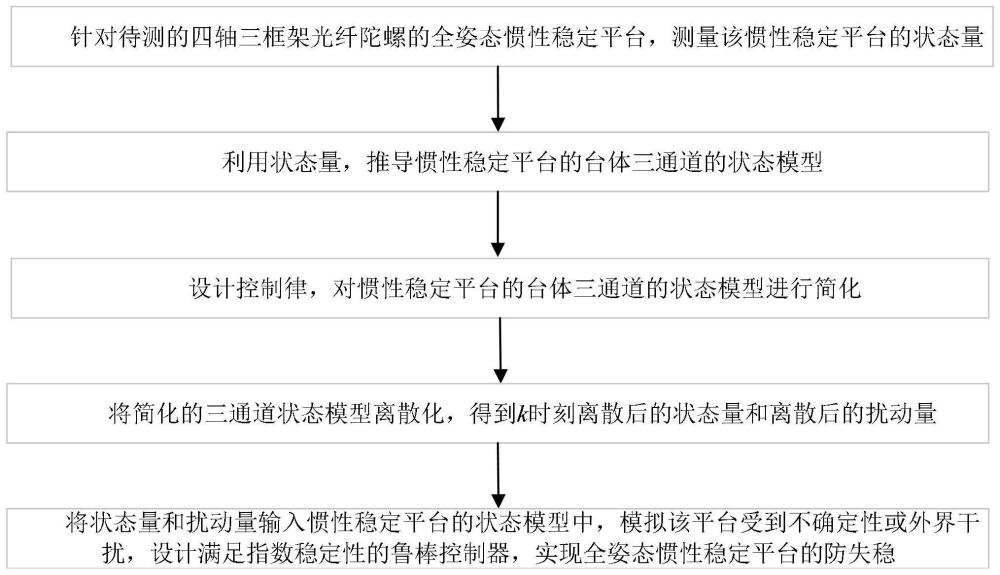
2、所述全姿态惯性稳定平台防失稳鲁棒指数稳定控制方法,具体步骤如下:
3、步骤一、针对待测的四轴三框架光纤陀螺的全姿态惯性稳定平台,测量该惯性稳定平台的状态量;
4、所述惯性稳定平台包括:台体和内、外框架与随动框架,用于保持台体在惯性空间定向,其中台体为中心圆形平台,台体通过轴与外层的内框架连接,内框架通过轴与外层的外框架连接,外框架通过轴与外层的随动框架连接,随动框架通过轴与弹(箭)连接;
5、当台体发生转动时,光纤陀螺仪会输出对应旋转信号,并结合考虑稳定回路存在的参数不确定性、非线性等干扰的干扰观测器输出结果,一同反馈给鲁棒控制器,使得台体或内外框架力矩的马达运作调节控制力矩,让惯性稳定平台回复稳定;随动框架敏感内框架角,一旦内框架转动,便会驱使随动框架轴的力矩马达工作,使内框架反向运动,直至内框架角为0。
6、状态量包括陀螺仪输出轴转角β(x)、β(y)、β(z)及其角速度以及台体分别绕三个台体轴xp、yp和zp对应的旋转角速度ωxp、ωyp、ωzp,
7、最终状态量方程为:
8、步骤二、利用状态量,推导惯性稳定平台的台体三通道的状态模型;
9、推导结果如下:
10、台体x通道状态方程:
11、台体y通道状态方程:
12、台体z通道状态方程
13、其中,ux、uy、uz为台体x、y、z通道上的控制输入,即电机在相应通道上的反馈力矩。δfx、δfy、δfz为台体x、y、z通道上的外加干扰力矩;ax、ay、az分别为对应通道状态量系数矩阵;bx、by、bz分别为对应通道的控制输入系数矩阵;cx、cy、cz为对应通道的输出系数矩阵。
14、步骤三、设计控制律,对惯性稳定平台的台体三通道的状态模型进行简化;
15、控制律为:u(t)=kx(t);其中,k∈r1×n为需设计的反馈增益矩阵。
16、然后,将台体三通道的状态模型统一写为如下形式:
17、
18、其中,当x(t)=xx(t)时,w(t)=δfx;
19、当x(t)=xy(t)时,w(t)=δfy;
20、当x(t)=xz(t)时,w(t)=δfz;
21、i为单位矩阵。
22、步骤四、将简化的三通道状态模型离散化,得到k时刻x(t)离散后的状态量x(k)和w(t)离散后的扰动量w(k);
23、离散化公式为:
24、得到:
25、
26、t为离散化周期;
27、步骤五、将状态量和扰动量输入惯性稳定平台的状态模型中,模拟该平台受到不确定性或外界干扰,设计满足指数稳定性的鲁棒控制器,实现全姿态惯性稳定平台的防失稳。
28、反馈增益矩阵设计如下:
29、如果存在对称正定矩阵p∈rn×n
30、
31、其中
32、则求得的反馈增益矩阵使得系统(1)满足规定的h∞性能指数γ的均方指数稳定性,提升四轴三框架全姿态惯性稳定平台控制系统的稳态和动态跟踪精度。
33、该鲁棒控制器实现了全姿态惯性稳定平台的防失稳,证明过程如下:
34、首先,定义鲁棒控制优化目标函数:
35、j(k)=xt(k)x(k)-γ2wt(k)w(k)
36、然后,选取李雅普诺夫函数v(k),并定义δv(k)=v(k+1)-v(k),则系统均方指数稳定条件为:
37、
38、其中,v(k)=xt(k)px(k);中间变量ξ(k)=[xt(k) wt(k)]t,
39、进一步得到:e{δv(k)}<e{-αv(k)-(xt(k)x(k)-γ2wt(k)w(k)}
40、则可得
41、
42、并且k→∞,s是自定义变量,j(s)是鲁棒控制优化目标函数,其自变量取s对应值,k0是k时刻的初始时刻,v(k0)是李雅普诺夫函数在初始时刻值;
43、由上式可得,即使存在扰动w,该鲁棒器仍满足指数稳定:
44、
45、可得
46、
47、与现有产品相比,本发明的优点在于:
48、1)本发明全姿态惯性稳定平台防失稳的鲁棒指数稳定控制方法,相比传统的校正控制动态性能和抗干扰性能,本发明考虑了参数波动及系统扰动,使得稳定回路控制系统具有快速响应,对参数变化及扰动不灵敏等优点,使得稳定回路具有自适应防失稳能力和扰动抑制能力。
49、2)本发明全姿态惯性稳定平台防失稳的鲁棒指数稳定控制方法,考虑惯性平台稳定回路系统模型存在一定的不确定性,并且针对状态初值不为零时,设计了满足指数稳定的鲁棒控制方法保证系统全过程的强鲁棒性等优点。
50、3)本发明全姿态惯性稳定平台防失稳的鲁棒指数稳定控制方法,考虑稳定回路存在的参数不确定性、非线性与干扰,降低了稳定回路稳态误差并改善了系统动态性能,弱化了初始条件对动态性能的影响,以实现四轴三框架全姿态惯性稳定平台控制系统的稳态和动态跟踪精度以及防失稳成功率。
本文地址:https://www.jishuxx.com/zhuanli/20240730/197976.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。