一种可三维全息巡视的无人机控制平台
- 国知局
- 2024-07-31 23:45:02
本发明涉及三维全息巡视,尤其涉及一种可三维全息巡视的无人机控制平台。
背景技术:
1、随着无人机技术的成熟,小型化、智能化、长续航无人机被广泛应用在诸多领域,其中包括遥感测绘、空中巡逻、环境监测等。无人机因其机动灵活、成本相对较低、无需人员直接介入等特点,为三维全息巡视提供了有力的载体;
2、全息投影技术近年来取得了重大突破,从实验室走向实用化,能够生成逼真的三维图像,使用户如同身临其境般观察目标场景。这种沉浸式显示技术为无人机采集的图像数据提供了全新的可视化方式。
3、经检索,中国专利号为cn116520890b的发明专利,公开了一种可三维全息巡视的无人机控制平台,与现有技术相比,该中国专利号为cn116520890b的发明专利能够解决对障碍物的飞行轨迹预测不准确,导致避障路径规划不合理的问题。
4、但是,在提升无人机飞行路径安全性的同时,无人机的三维全息巡视还依赖于适宜的光照环境,过强或过弱的光线都会影响全息影像的可见度和清晰度,特别是在户外强光照射下,全息影像可能会变得模糊不清的情况,会影像到无人机巡视信息的准确性,所以,在此提出了一种可三维全息巡视的无人机控制平台。
技术实现思路
1、本发明的目的是为了解决现有技术中存在依赖于适宜的光照环境的缺点,而提出的一种可三维全息巡视的无人机控制平台。
2、为了实现上述目的,本发明采用了如下技术方案:
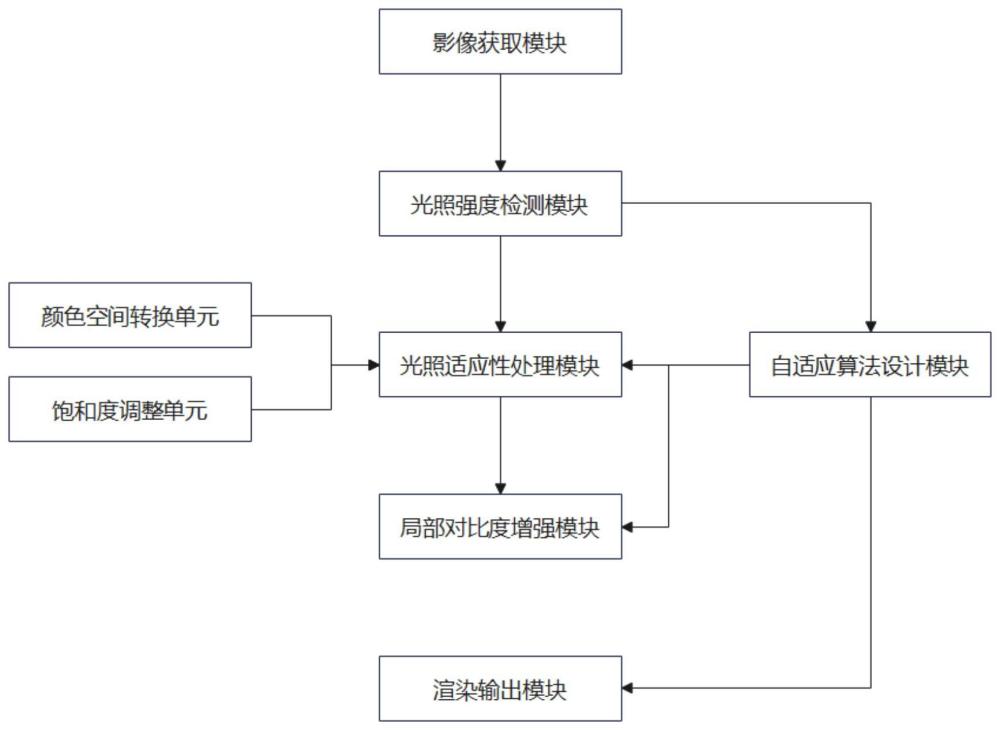
3、一种可三维全息巡视的无人机控制平台,包括影像获取模块,无人机全息巡视模块包括:
4、光照强度检测模块:从影像数据中收集当前环境的光照强度数据,以勒克斯单位表示;
5、光照适应性处理模块:对原始影像及图像进行动态范围压缩或扩展;
6、局部对比度增强模块:根据图像纹理特征和光照条件选择性地增强重要部分的对比度,抑制无关背景噪声;
7、自适应算法设计模块:基于人眼视觉特性,定义光照强度与全息影像亮度之间的非线性关系函数;
8、渲染输出模块:将处理后的影图像数据送入全息投影算法中,进行三维全息影像的重建与渲染。
9、光照强度检测模块测量传感器实时捕获环境中的光线,并将其转换为模拟或数字信号,基于在特定光强下的输出电压vout,根据传感器的数据手册找到其光谱响应曲线以及转换系数,记为光照强度与传感器输出信号的比例常数k,光照强度为:
10、i=(vout-io)/k
11、其中,i代表当前环境的光照强度,单位通常是勒克斯lux;
12、io指暗电流补偿值或暗电压,即在没有光照或者极低光照条件下传感器的输出电压。
13、光照适应性处理模块中包括颜色空间转换单元及饱和度调整单元,基于无人机态范围的相机捕捉同一场景下的多个曝光等级的照片,包括低曝光暗部细节照片、正常曝光照片和高曝光亮部细节照片,对不同曝光等级的图片进行几何校正和对齐,然后进行hdr合成,将不同曝光等级下同一像素点的最佳亮度值合并在一起,最后根据光照传感器的实时数据动态调整合成后的图像的亮度、对比度、饱和度参数,使之适应当前环境的光照条件。
14、光照适应性处理模块中颜色空间转换单元将图像从rgb颜色空间转换至hsv,设定其中h代表颜色种类,s代表颜色纯度,v代表颜色的亮度,转换过程为,找出rgb分量中的最大值max和最小值min,计算明度v,即最大值max,在最大值等于最小值时,色相和饱和度均为0,否则,计算色相h和饱和度s:饱和度为:
15、
16、色相h通过max对应的颜色分量r、g或b,基于比例关系得出,当max是红色分量r时,那么色相h位于红色和绿色之间。
17、光照适应性处理模块中饱和度调整单元,首先设计一个单调递增或递减的函数,代表在光照强度较低时降低饱和度,在光照强度较高时提高饱和度:
18、math1s'=s+k*i_light
19、其中k是一个根据光照强度调整饱和度的系数,正负值决定了调整方向;s代表原始饱和度,它是颜色的一个属性,表示颜色的纯度或强度,介于0到1之间;
20、i_light代表光照强度,以勒克斯lux为单位衡量环境中的光照水平;
21、同时根据饱和度的饱和限值,防止过度调整导致颜色失真,建立新关系式:
22、math1s'=clamp(s+a*i_light^b,0,1)
23、其中clamp(x,min,max)函数用于限制x的值在min和max之间,a和b是调整参数。
24、局部对比度增强模将图像分割成若干个子区域,基于图像的纹理、颜色、梯度或者其他特征进行分割,对每个分割出的区域进行特性分析,独立调整对比度,基于空间距离和像素值相似性,对图像进行平滑处理的同时保持边缘锐利,根据图像的具体内容和光照条件,设计个性化的对比度增强函数,根据光照强度动态调整对比度提升的程度,其中,设计一个函数数输入为当前区块的光照强度和原始对比度,输出为增强后的对比度:
25、c_enhanced=c_original*(1+k*i_light^n)
26、其中,c_original是原始对比度,i_light是光照强度,k和n是根据实验数据和视觉感知模型确定的调整系数;
27、最后对特别重要的图像区域进行额外增益,最后将增强过的各个区域无缝拼接回原始图像框架内。
28、自适应算法设计模块基于人眼视觉特性,定义光照强度与全息影像亮度之间的非线性关系函数,采用伽马校正变换函数:
29、code1brightness_adj=pow(original_brightness,gamma)
30、其中gamma是随环境光照强度动态调整的参数,环境越亮,gamma值越大,以降低全息影像亮度,反之增加,当环境光线较弱时,适当提高全息影像的亮度和对比度,当环境光线较强时,降低全息影像的亮度以防止过曝,同时调整色彩饱和度和对比度。
31、渲染输出模块根据光照响应曲线计算出的亮度调整值,对全息影像进行实时处理,对全息投影源的原始图像进行亮度、对比度、饱和度的动态调整,在全息显示系统的信号处理阶段,直接修改输出信号的强度,将调整后的全息影像参数实时推送到全息显示设备中。
32、本发明具备以下有益效果:
33、1、本发明中,通过引入了应用局部对比度增强算法,能有效突出图像的细节信息,进行细节凸显,确保在强光下不会丢失阴影区域的细节,在弱光下也不会忽视亮区的细节,增强了全息影像的整体质感。
34、2、本发明中,自适应算法能够根据不同场景、时间和天气状况下的光照变化做出灵活反应,使得无人机在执行全息巡视任务时无需担心光照条件变化对全息影像质量的影响,提升了无人机工作的稳定性和有效性。
技术特征:1.一种可三维全息巡视的无人机控制平台,包括影像获取模块,其特征在于,无人机全息巡视模块包括:
2.根据权利要求1所述的一种可三维全息巡视的无人机控制平台,其特征在于,光照强度检测模块测量传感器实时捕获环境中的光线,并将其转换为模拟或数字信号,基于在特定光强下的输出电压vout,根据传感器的数据手册找到其光谱响应曲线以及转换系数,记为光照强度与传感器输出信号的比例常数k,光照强度为:
3.根据权利要求1所述的一种可三维全息巡视的无人机控制平台,其特征在于,光照适应性处理模块中包括颜色空间转换单元及饱和度调整单元,基于无人机态范围的相机捕捉同一场景下的多个曝光等级的照片,包括低曝光暗部细节照片、正常曝光照片和高曝光亮部细节照片,对不同曝光等级的图片进行几何校正和对齐,然后进行hdr合成,将不同曝光等级下同一像素点的最佳亮度值合并在一起,最后根据光照传感器的实时数据动态调整合成后的图像的亮度、对比度、饱和度参数,使之适应当前环境的光照条件。
4.根据权利要求1所述的一种可三维全息巡视的无人机控制平台,其特征在于,光照适应性处理模块中颜色空间转换单元将图像从rgb颜色空间转换至hsv,设定其中h代表颜色种类,s代表颜色纯度,v代表颜色的亮度,转换过程为,找出rgb分量中的最大值max和最小值min,计算明度v,即最大值max,在最大值等于最小值时,色相和饱和度均为0,否则,计算色相h和饱和度s:饱和度为:
5.根据权利要求1所述的一种可三维全息巡视的无人机控制平台,其特征在于,光照适应性处理模块中饱和度调整单元,首先设计一个单调递增或递减的函数,代表在光照强度较低时降低饱和度,在光照强度较高时提高饱和度:
6.根据权利要求1所述的一种可三维全息巡视的无人机控制平台,其特征在于,局部对比度增强模将图像分割成若干个子区域,基于图像的纹理、颜色、梯度或者其他特征进行分割,对每个分割出的区域进行特性分析,独立调整对比度,基于空间距离和像素值相似性,对图像进行平滑处理的同时保持边缘锐利,根据图像的具体内容和光照条件,设计个性化的对比度增强函数,根据光照强度动态调整对比度提升的程度,其中,设计一个函数数输入为当前区块的光照强度和原始对比度,输出为增强后的对比度:
7.根据权利要求1所述的一种可三维全息巡视的无人机控制平台,其特征在于,自适应算法设计模块基于人眼视觉特性,定义光照强度与全息影像亮度之间的非线性关系函数,采用伽马校正变换函数:
8.根据权利要求1所述的一种可三维全息巡视的无人机控制平台,其特征在于,渲染输出模块根据光照响应曲线计算出的亮度调整值,对全息影像进行实时处理,对全息投影源的原始图像进行亮度、对比度、饱和度的动态调整,在全息显示系统的信号处理阶段,直接修改输出信号的强度,将调整后的全息影像参数实时推送到全息显示设备中。
技术总结本发明涉及三维全息巡视技术领域,且公开了一种可三维全息巡视的无人机控制平台,包括影像获取模块,无人机全息巡视模块包括:光照强度检测模块:从影像数据中收集当前环境的光照强度数据,以勒克斯单位表示;光照适应性处理模块:对原始影像及图像进行动态范围压缩或扩展;局部对比度增强模块:根据图像纹理特征和光照条件选择性地增强重要部分的对比度,抑制无关背景噪声;自适应算法设计模块:基于人眼视觉特性,定义光照强度与全息影像亮度之间的非线性关系函数;渲染输出模块:将处理后的影图像数据送入全息投影算法中,进行三维全息影像的重建与渲染。技术研发人员:岳鹍受保护的技术使用者:天津现代职业技术学院技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240730/198417.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。