在线检测机器人的调节控制系统的制作方法
- 国知局
- 2024-07-31 23:45:00
本发明涉及检测机器人,具体为在线检测机器人的调节控制系统。
背景技术:
1、机器人是一种能够半自主或全自主工作的智能机器;机器人能够通过编程和自动控制来执行诸如作业或移动等任务,在一些工件生产线内,需采用对应的在线检测机器人对工件进行检测,以此识别此工件是否符合下放标准。
2、专利公开号为cn108762257a的申请公开了一种基于摩擦力自适应调节的机器人行走控制系统,涉及机器人智能调节控制系统领域。本发明中:功率输出监测单元通过数据信息/信号传输模块与主处理控制单元相联;行走位移监测单元通过数据信息/信号传输模块与主处理控制单元相联;主处理控制单元通过信息/信号传输方式与摩擦调节控制单元相联。本发明通过功率输出监测方式,对机器人行走过程中的动力输出数据信息进行监测;通过行走位移监测方式,对机器人的实时行走位移进行传感监测,并通过主处理控制单元对机器人所处的地表状态进行分析,通过摩擦调节控制单元对机器人的行走接触材料面进行转动改变,从而改变机器人与行走面之间的摩擦力,进而提升机器人的行走效率。
3、随着时代的发展,机器人已经逐步智能化且功能更加齐全,针对于工件检测生产线内,智能机器人需进行初步识别,判定检测表面是否异常,后续再通过所分析的参数,对调节件进行调节控制,使检测件对异常表面进行检测,因原始点以及检测点的具体位置不同,需进行路线规划,但在路线规划过程中,并未根据识别距离确定一组最佳的路径规划路线,导致机器人在移动过程中,并不能进行检测,需到达指定点后才可进行检测,其检测并不全面从而影响后续的检测效果。
技术实现思路
1、针对现有技术的不足,本发明提供了在线检测机器人的调节控制系统,解决了未根据识别距离确定一组最佳的路径规划路线,导致机器人在移动过程中,并不能进行检测的问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:在线检测机器人的调节控制系统,包括:
3、检测面获取端,对在线检测机器人正常检测工件的待检测表面进行获取并同时确认检测工件的工件编号,并将所获取的若干个待检测表面传输至异常区域锁定端内;
4、数据库,内部包括有若干个不同检测工件的标准面数据包,其标准面数据包内部的标准面均由操作人员提前存储,根据个人经验确定不同检测工件的标准面;
5、异常区域锁定端,对所获取的若干个待检测表面进行接收,再根据工件编号,从数据库内提取对应检测工件的标准面数据包,将待检测表面与标准面数据包内部的对应标准面进行一一比对,确定比对异常面,若比对相似度≤95%,则将此待检测表面标定为比对异常面,若比对相似度>95%,则不进行任何处理,再判定此比对异常面属于归整面或不归整面,具体方式为:
6、随后判定比对异常面是否为归整面,若为归整面,则将此比对异常面传输至归整面处理端内,若不为归整面,则将此比对异常面传输至不归整面处理端内,判定方式为:
7、对比对异常面表面内所存在的最高凸点进行确定,再对比对异常面表面内所存在的最低点位进行确定,锁定最高凸点与最低点位之间的水平距离sj,并判定水平距离sj是否满足:sj≥y1,其中y1为预设值,若满足,则将此比对异常面表面标定为不归整面,并传输至不归整面处理端内,若不满足,则将此比对异常面表面标定为归整面,并传输至归整面处理端内;
8、归整面处理端,对标定为归整面的比对异常面进行分析,直接确定此比对异常面的中心点,将此中心点标定为待移动点,方式为:
9、并将此中心点向一侧进行平移,确定平移点,将此平移点标定为待移动点,其中平移距离为x1m,其中x1为预设值;
10、其中,平移的方向与归整面表面相互垂直,将所确定的待移动点传输至路径规划分析端内;
11、不归整面处理端,对标定为不归整面的比对异常面进行分析,将比对异常面进行比例缩小,确定外部圆圈,从外部圆圈内选定最高点以及最低点,随后,再确定此比对异常面的中心点,以最低点-中心点-最高点的运动轨迹确定检测路线,并将最低点标定为待移动点,具体方式为:
12、根据所确定的比对异常面,直接确定此比对异常面的中心点,再将此比对异常面进行等比例缩小90%,确定缩小面,将缩小面的中心点与比对异常面的中心点进行重合,将缩小面与比对异常面之间未相交的区域标定为外围区域;
13、对外围区域内所存在的最高点以及最低点进行确认,再根据所确认的中心点,将三组点位向一侧进行平移,确定平移点,其中平移距离为x1m,其中x1为预设值,再按照平移后的“最低点-中心点-最高点”的路径走向确定检测路线,并将此平移后的最低点标定为待移动点位,并将所标定的待移动点位传输至路径规划分析端内,将检测路线传输至控制终端内;
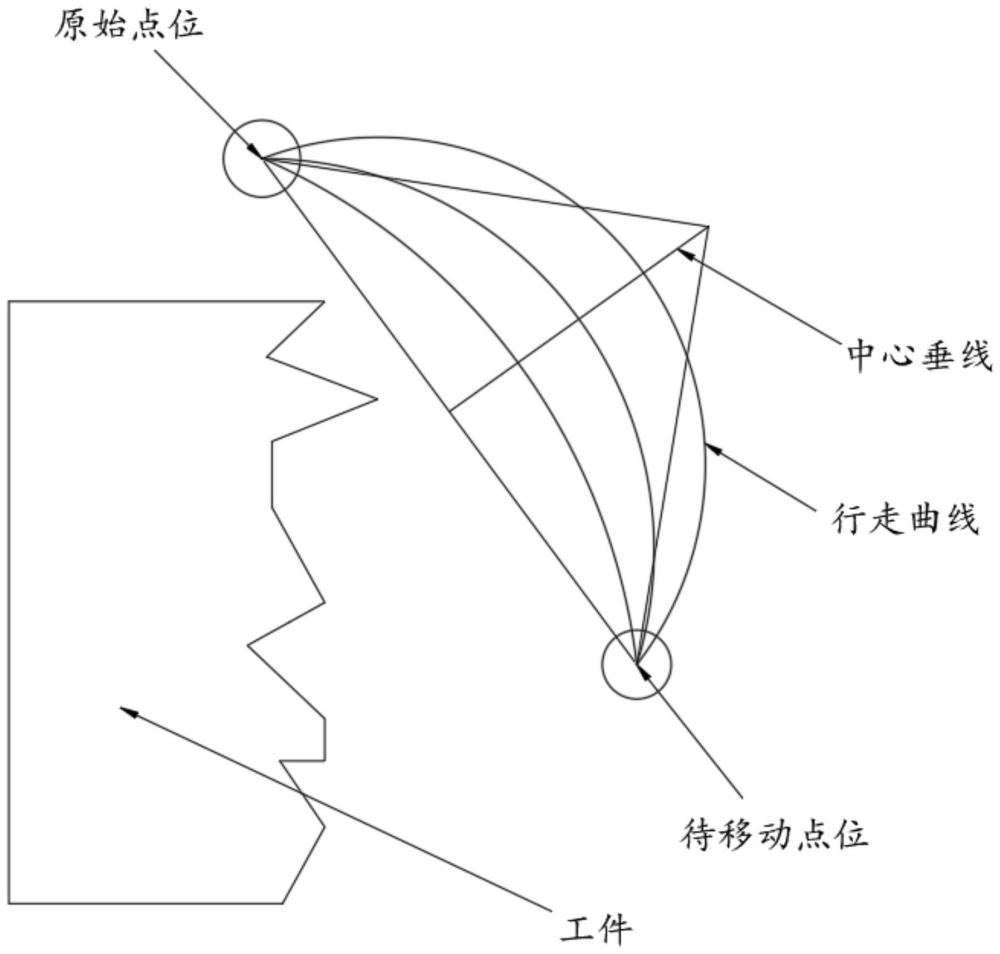
14、路径规划分析端,确定此检测机器人检测件的初始原始点位,再根据所接收的待移动点位,进行移动路径规划,并确定最佳规划路线,具体方式为:
15、将原始点位与待移动点位进行相连,确定一组连接线,再通过此连接线构建一组等腰三角形,从等腰三角形的顶角内确定中心垂线;
16、根据中心垂线,确认若干组行走曲线,其行走曲线的两个端点分别为原始点位和待移动点位,且行走曲线基于中心垂线相互镜像;
17、从若干个行走曲线内,确定不同行走曲线与中心垂线的交点,根据此交点,确定与此比对异常面的最近距离以及最远距离,并将其标定为:[j imin,j imax],其中j imin为最近距离,j imax为最远距离,其中i代表不同的行走曲线,再将若干个区间[j imin,jimax]与标准距离区间进行交叉比对处理,确定交叉区域,其中标准距离区间为预设区间,将存在最大交叉区域的行走曲线标定为最佳规划路线,最大交叉区域为此区域内两个端点值相差最大,判定最佳规划路线是否与工件交叉,若交叉,则剔除此行走曲线,重新选定最佳规划路线,若未交叉,则直接将所选定的最佳规划路线传输至控制终端内。
18、优选的,还包括控制终端,根据所确定的最佳规划路线,将在线检测机器人的检测件从原始点位移动至待移动点位,按照最佳规划路线进行行走,到达待移动点位后,判定此阶段是否存在检测路线,若存在,则按照检测路线的路线规划进行行走,进行表面检测,若不存在,则在待移动点位处,进行表面监测。
19、本发明提供了在线检测机器人的调节控制系统。与现有技术相比具备以下有益效果:
20、本发明通过对工件进行初识别检测,将存在异常的平面进行标定,随后将标定的平面判定为归整面或不归整面,针对于归整面,则直接通过确定中心点的方式确定待移动点,针对于不归整面,则直接通过确定中心点以及边缘轮廓的方式,确定检测路线并确定对应的待移动点,采用此种方式,针对于不同的平面,采用不同的方式进行处理,其处理方式更为全面,同时确定检测路线,确保后期检测机器人的表面检测全面度;
21、再根据原始点位以及对应的待移动点,确定对应的行走曲线,并从若干个行走曲线,选定最佳规划路线,便能选取一个最佳的移动轨迹,在移动过程中,可对异常面进行充分检测,随后,再按照检测路线进行检测,此种检测方式,更为全面,能达到的检测效果更好,更能确保检测过程中的精准度。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198415.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表