基于深度神经网络的高速滑翔式飞行器在线轨迹优化方法与流程
- 国知局
- 2024-07-31 23:30:47
本发明涉及轨迹优化,尤其涉及一种基于深度神经网络的高速滑翔式飞行器在线轨迹优化方法。
背景技术:
1、高速滑翔式飞行器因其速度高、机动范围大、轨迹不易预测等特点,可实现远程快速物资运输或精准打击。轨迹优化对飞行器总体设计起着至关重要的作用。飞行器在热流、过载、动压等约束条件下轨迹优化计算量大,计算时间要满足指导周期限制,突破在线计算效率是在线轨迹规划的一大瓶颈。
2、现有轨迹优化数值方法主要包括间接法和直接法。间接法利用庞特里亚金极小值原理构造两点边值问题,然后推导一阶必要条件,进而得到状态变量和控制变量的最优函数形式。高速飞行器轨迹优化往往具有极强的非线性特点,间接法往往不能直接获得其解析解。直接法是通过将最优控制问题离散成非线性规划问题,然后通过数值方法求解非线性规划问题得到问题的最优解。与间接法相比,直接法无需推导一阶必要条件,且具有收敛半径大,对迭代初值不敏感等特点。伪谱法属于直接法,因其离散精度高,收敛速度快,被广泛运用于轨迹优化问题。在2019年,任鹏飞等人在《北京航空航天大学学报》的第45卷第11期发表的《基于自适应伪谱法的高超声速飞行器再入轨迹优化》一文中,利用自适应伪谱法求解带有复杂约束的三自由度高速飞行器再入轨迹优化问题,实现了再入轨迹优化的高效求解。
3、自适应伪谱法尽管具备高效地求解带有复杂约束条件的轨迹优化问题,但是仍然避免不了求解大规模非线性矩阵,其求解耗时长,解的精度依赖于初值猜测,无法从根本上满足在线实时优化的需求。
技术实现思路
1、鉴于此,本发明提供一种基于深度神经网络的高速滑翔式飞行器在线轨迹优化方法,解决了现有数值方法无法在线实时优化轨迹的问题。
2、本发明公开了一种基于深度神经网络的高速滑翔式飞行器在线轨迹优化方法,其包括:
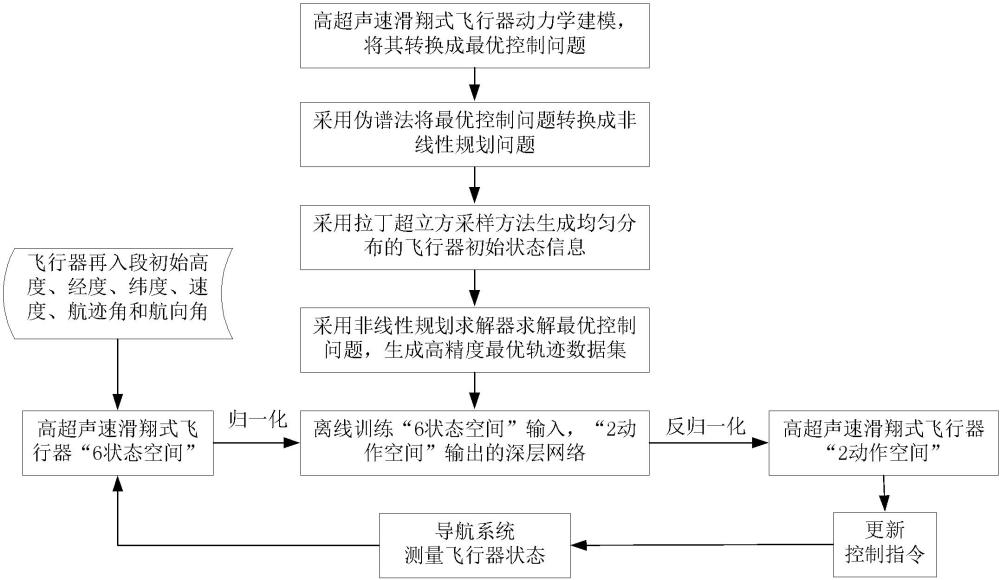
3、建立高速滑翔式飞行器动力学模型,增加飞行过程的热流约束、过载约束、动压约束,加入飞行器的初始状态和末端状态约束,并将高速滑翔式飞行器动力学模型转换成最优控制问题;采用自适应伪谱法将最优控制问题转换成非线性规划问题;采用拉丁超立方采样生成均匀分布的飞行器初值状态信息;根据飞行器不同初始状态信息,采用非线性规划求解器求解非线性规划问题,生成最优轨迹数据集;最优轨迹数据集由飞行器的状态变量以及对应的控制变量构成;状态变量包括飞行器的高度、经度、纬度、速度、航向角和航迹角;控制变量包括飞行器的倾侧角和攻角;
4、将最优轨迹数据集划分成训练集和测试集,将训练集中的状态变量作为深度神经网络的输入,将训练集中的控制变量作为深度神经网络的输出,训练离线的深度神经网络;将测试集中的状态变量输入训练好的深度神经网络,得到飞行器的控制变量,更新倾侧角和攻角控制指令,飞行器按照新生成的控制指令进行飞行;
5、将导航系统实时测量的飞行器状态信息输入已训练好的深度神经网络,形成飞行器在线轨迹规划闭环,实现飞行器在线轨迹优化。
6、进一步地,对再入段的高速滑翔式飞行器动力学建模,将地球视为球体,忽略地球自转,建立3自由度动力学方程:
7、
8、其中,为飞行器地心高度,,为地球平均半径,为飞行器地面高度,为飞行器位置经度,为飞行器位置纬度,为飞行器速度大小,为飞行器航迹角,为飞行器航向角,为飞行器倾侧角,为飞行器飞行时间,为飞行器所受阻力,,为大气密度,,为海平面大气密度,为自然对数的底数,为常系数,为阻力系数,为飞行器的特征面积,为飞行器所受升力,,为飞行器升力系数,为飞行器质量,为地球引力加速度,,为地球表面重力加速度。
9、进一步地,飞行器进入大气层时,其机身与大气层会产生巨大摩擦力,考虑到飞行器外壳材料的耐热能力,因此需要增加热流约束:
10、
11、其中,为驻点热流,是热流系数,为常值参数,为大气密度,为飞行器速度,为最大热流约束;
12、飞行器在高速飞行过程中其加速度会急剧增大,考虑到飞行器自身的承受能力,因此需要增加过载约束:
13、
14、其中,为飞行器过载,为飞行器所受升力,为飞行器所受阻力,为飞行器质量,为地球引力加速度,为最大过载约束;
15、飞行器表面空气流速极快,其表面会产生极大的压力,为了保证压力值不超过飞行器所承受的极限压力,因此需要增加动压约束:
16、
17、其中,为飞行器动压,为大气密度,为飞行器速度,为最大动压约束。
18、进一步地,所述飞行器的初始状态和末端状态约束分别表示为:
19、
20、其中,为初始时刻,为末端时刻,为飞行器初始时刻的高度,为飞行器初始时刻的经度,为飞行器初始时刻的纬度,为飞行器初始时刻的飞行速度,为飞行器初始时刻的航迹角,为飞行器初始时刻的航向角,为飞行器初始高度,为飞行器初始经度,为飞行器初始纬度,为飞行器初始飞行速度,为飞行器初始航迹角,为飞行器初始航向角,为飞行器末端时刻的高度,为飞行器末端时刻的速度,为飞行器末端时刻的航迹角,为飞行器末态高度,为飞行器末态速度,为末态航迹角。
21、进一步地,目标选择为控制变量攻角和倾侧角交叉范围最大化,即最大化纬度,因此选用最大化纬度作为性能指标:
22、
23、其中,为性能指标,表示最大纬度,表示末端时刻的纬度。
24、进一步地,所述将高速滑翔式飞行器动力学模型转换成最优控制问题,包括:
25、
26、其中,为飞行器位置经度,为飞行器位置纬度,为第i个禁飞区中心经度,为第i个禁飞区中心纬度,为第i个禁飞区半径,为最优控制问题描述,表示约束条件,在满足约束条件下,寻找最优的状态变量和控制变量,使得性能指标最小。
27、进一步地,所述采用自适应伪谱法将最优控制问题转换成非线性规划问题,包括:
28、将最优控制问题的时域区间映射到[-1,1],采用伪谱配点将连续的动力学方程离散化,并使用拉格朗日插值多项式逼近状态变量和控制变量,则动力学中的微分约束转化成在离散配点处的等式约束,最终将连续的最优控制问题转化成离散的非线性规划问题。
29、进一步地,所述采用拉丁超立方采样生成均匀分布的飞行器初值状态信息,包括:
30、对再入段飞行器初始高度,经度,纬度,速度进行拉丁超立方采样,生成均匀分布的飞行器初始状态;假设拉丁超立方的采样矩阵为一个多维矩阵,每个维度被划分为若干个等概率的区间,每个区间内至少含有一个样本点,且整个采样矩阵满足拉丁超立方条件,拉丁超立方条件包括采样的唯一性以及完整性,采样的唯一性即确保每个样本在每个维度上都是唯一的;采样的完整性即每个维度都被完全覆盖,保证样本在整个多维区间中的均匀分布;
31、首先假设变量,,为第j个维度上的采样值,为采样函数,和分别为采样范围的下界和上界,累计分布函数为,将区间平均分成m个区间,即,为维度为j的第i个区间的取值范围,其次,计算的第i个区间的采样值,为的第i个区间的采样值,为区间[0,1]内的随机值;然后,将集合中的元素随机排列,得到;最后,将通过分布函数的反函数映射为样本值,即,为维度为j的分布函数的反函数;于是,采样矩阵表示为:
32、
33、其中,采样矩阵为,m表示总体样本数量,n表示每个样本中变量数量;当n的值为4时,表示高度,经度,纬度和速度共4个维数;为第m行第n列的采样值。
34、进一步地,所述将训练集中的状态变量作为深度神经网络的输入,将训练集中的控制变量作为深度神经网络的输出,训练离线的深度神经网络,包括:
35、记最优轨迹数据集,其中,表示输入的维状态变量,表示第i个采样地心距,表示第i个采样经度,表示第i个采样纬度,表示第i个采样速度,表示第i个采样航迹角,表示第i个采样航向角,表示输出的维控制变量,为第i个采样的攻角,第i个采样的倾侧角,为训练样本数量;深度神经网络模型输入层有6个神经元,对应飞行器的6状态空间,输出层有2个神经元,对应飞行器的2动作空间,隐藏层有若干层;采用反向传播算法寻找所需的所有隐藏层和输出层对应的线性系数矩阵和偏置向量,使得深度神经网络的实际输出趋近于期望输出;
36、建立基于均方误差的损失函数,即对于每个样本,期望最小化下式:
37、
38、其中,为线性系数矩阵,为偏置向量,为状态变量,为控制变量,为l2范数,为前向传播算法计算出的输出层第层,其表达式为:
39、
40、其中,为激活函数,为第层的和的线性组合,为第层的线性关系矩阵,为第层的偏置向量,为第层向前传播算法输出结果;
41、损失函数转换为:
42、
43、求解,的梯度,如下式:
44、
45、其中,符号表示hadamard积,为激活函数的导数;
46、第层输出层的梯度记为,其表达式为:
47、
48、记第层的梯度为,,则表示为
49、
50、其中,为第层的梯度,为第层的和的线性组合。
51、进一步地,所述将训练集中的状态变量作为深度神经网络的输入,将训练集中的控制变量作为深度神经网络的输出,训练离线的深度神经网络,还包括:
52、深度神经网络反向传播算法:
53、输入为:总层数为,以及隐藏层和输出层的神经元个数,激活函数,损失函数,迭代步长,最大迭代次数,停止迭代阈值,个训练样本;
54、输出为:各隐藏层与输出层的线性系数矩阵和偏置向量;
55、初始化线性系数矩阵和偏置向量的值为一个随机数;
56、对于第i个训练样本,将深度神经网络的输入设置为;
57、对于,向前传播计算,的取值范围为2至;为第l层,第i个节点输出结果;
58、利用损失函数计算输出层的梯度;
59、当的取值范围从大到小为到2时,利用反向传播算法计算;为第层,第i个节点的和的线性组合;
60、当的取值范围从小到大为2至时,更新第层的系数矩阵和偏置向量:
61、
62、遍历所有训练样本,不断更新各隐藏层和输出层的线性系数矩阵和偏置向量,当线性系数矩阵和偏置向量的当前更新值与上一次迭代更新值之间的差值小于停止迭代阈值时,则输出各隐藏层与输出层的线性系数矩阵和偏置向量。
63、由于采用了上述技术方案,本发明具有如下的优点:本发明根据再入段高速滑翔式飞行器不同的初始状态信息,基于自适应伪谱法通过非线性规划求解器生成大量高精度离线轨迹数据集,确保了深度神经网络模型的训练可靠性和性能优越性,深度神经网络能够更准确的捕捉飞行器在不同环境下的行为模式,从而提高其泛化能力和飞行控制的鲁棒性。结合导航系统实时测量飞行器状态信息和深度神经网络快速输入和输出特点,可实现高速滑翔式飞行器在线轨迹优化闭环,解决了现有数值方法实时性无法满足在线轨迹规划的问题。
本文地址:https://www.jishuxx.com/zhuanli/20240730/197838.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。