一种可重复使用飞行器控制方法及其可视化平台
- 国知局
- 2024-07-31 23:47:33
本发明涉及可重复使用飞行器,具体涉及一种可重复使用飞行器控制方法及其可视化平台。
背景技术:
1、可复用运载器的特点是其全部或大部分部件可在发射后回收,经检修翻新后可以重新投入使用,通过多次发射任务分摊设计制造和测试等环节的成本。按照发射与回收方式不同,常见rlv可被分为垂直起降(vtvl)、水平起降(hthl)和垂直起飞水平降落(vthl)三种。
2、其中,垂直起降可重复使用运载火箭(vertical takeoff vertical landingreusable launch vehicle,vtvl-rlv)是一种在传统运载火箭上进行小幅改进(一子级加装栅格舵或空气舵等),使其具备垂直着陆返回功能的新型运载工具,具有对着陆场地需求低、技术跨度小和研发成本相对较低等优点。
3、可回收使用运载火箭从发射到垂直着陆共历经7个阶段,包括主动段、姿态调整段、修航段、高空无动力下降段、动力减速下降段、大气层内飞行段和垂直着陆段。在这7个飞行过程中存在摆动发动机、栅格舵、喷射反作用系统等多种执行机构,发动机也需要在不同的飞行段,进行多次工作状态的转变,且整个飞行过程的空域广、速域大,存在诸多内外扰动,这为高精度安全起降带来了极大挑战。因此对于可重复使用运载火箭的起降过程进行建模仿真,并伺服机构作用下对姿态控制系统进行优化设计,对于运载火箭的起降过程尤为重要。
技术实现思路
1、为此,本发明提供一种可重复使用飞行器控制方法及其可视化平台,以解决背景技术中提出的问题。
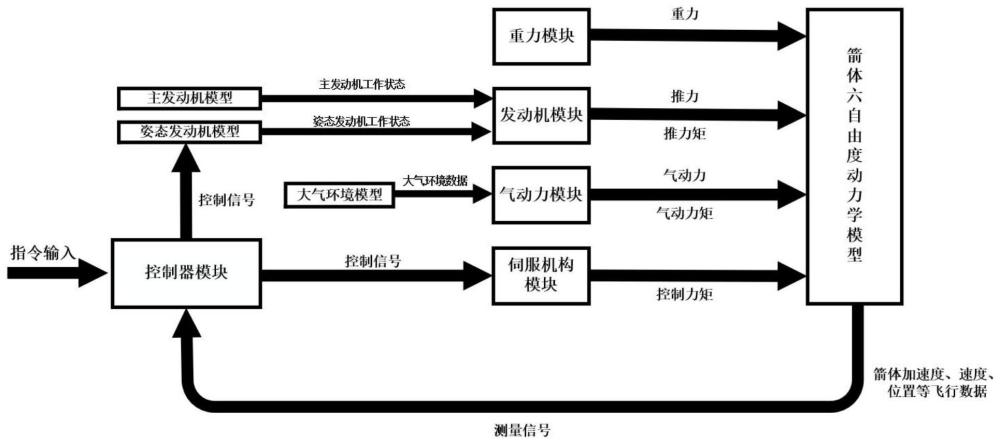
2、为了实现上述目的,本发明提供如下技术方案:一种可重复使用飞行器控制可视化平台,对可重复使用飞行器进行模块化建模,整体模型基于箭体六自由度模型,至少包括:
3、气动力模块,大气层划分为对流层、平流层和高层大气,气动力模块结合对应大气层的特性,分别表示出温度、大气压强以及空气密度,在得到大气环境模型提供的大气环境数据后,对气动力与气动力力矩进行推算,为箭体六自由度模型提供气动力与气动力矩;
4、发动机模块,至少包括主发动机模型和姿态发动机模型,主发动机模型为箭体六自由度模型提供推力,姿态发动机模型为箭体六自由度模型提供推力和推力矩;结合可重复使用飞行器各阶段飞行特点,分别定义了不同飞行阶段发动机的工作状态,并在matlab/simulink中搭建发动机模型,通过调节推力与推力矩以实现不同飞行阶段的性能要求;
5、重力模块,根据发动机地面实验中的发动机推力和油耗参数,并结合可重复使用飞行器的实际发射情况,定义出箭体质量、燃料质量流量,生成数据;在读取数据至matlab后,对这些离散数据进行插值,拟合出连续的曲线,为箭体六自由度模型提供箭体的质量变化情况与重力数据;
6、控制器模块,控制器模块通过测量机构的反馈信号,实时计算箭体的姿态偏差,并生成相应的控制指令信号,伺服机构模块以及姿态发动机模型根据相应的控制信号进行动作,对箭体六自由度模型施加控制力矩,以实现对箭体姿态的精确控制;控制器模块内部采用模糊控制器对pid控制器的控制参数进行实时调整,整体上构成模糊pid控制器,以进一步提升控制性能。
7、优选的,箭体六自由度模型的箭体动力学方程为:
8、
9、式中,m为火箭的总质量;m0为火箭的初始质量;为发动机总秒耗量;t为火箭飞行时间;vx、vy、vz为火箭发射坐标系下的速度分量,其合速度为v;x、y、z分别为发射坐标系下的位置;p为推力;y1c和z1c为发动机控制力;γ、ψ、分别为滚转角、偏航角和俯仰角;γv、σ、θ分别为倾侧角、弹道偏角和弹道倾角;ax、ay、az为气动力分量;为火箭重力分量;ωe是地球自转角速度;r为发射坐标系下的地心距矢量;h为角动量;ω为火箭的角速度;mδ为姿态发动机推力矩;ms为伺服机构力矩;mb为气动力矩。
10、优选的,主发动机模型根据发动机地面实验中的发动机推力和油耗参数,并结合发动机的实际工作情况,至少得出发动机推力、箭体质量以及燃料质量流量数据,数据导入至matlab后,需要对此类离散数据进行插值处理,拟合出连续的曲线,在将推力数据拟合结束后,将数据导入matlab/simulink中。
11、优选的,重力模块和主发动机模型均利用三次样条插值对离散数据进行处理。
12、优选的,模糊pid控制器是模糊控制器和pid控制器相结合的新型控制器;其中模糊控制器为双输入三输出系统,以姿态角偏差e和姿态角偏差变化率ec为输入量,以pid参数的修正值为输出量;模糊pid控制器通过接收箭体姿态的反馈信号,实时计算出箭体的姿态偏差,并经微分器计算得出姿态角偏差变化率ec,之后将姿态角偏差e和姿态角偏差变化率ec输入至模糊控制器,模糊控制器按照一定的隶属度对输入变量进行模糊化处理,使得精确值变换为模糊域上的模糊值,然后根据设定好的模糊规则进行模糊推理与模糊决策,得出模糊控制量,在进行去模糊化处理后得到pid参数的具体修正值,模糊pid控制器以修正后的pid参数,生成相应的控制信号并传输至各伺服机构与姿态发动机模型,伺服机构模型与姿态发动机模型依照控制信号进行动作,对箭体六自由度模型施加控制力矩,以实现对于箭体姿态的控制。
13、优选的,将输入量模糊化时,将模糊论域选为n挡,即取变量的模糊论域c为{-n,-n+1,…,0,…,n-1,n};变量从物理论域[a,b]到模糊论域c的转换,公式为:
14、
15、模糊变量论域设置为[-6,6],为确保每个实时输入变量的清晰值都能模糊化,需要保证整个论域都要有覆盖在模糊论域上的模糊子集相匹配,用7个模糊子集描述:负大、负中、负小、零值、正小、正中、正大,即nb、nm、ns、zo、ps、pm、pb;输入变量和输出变量的隶属函数采用高斯型隶属函数;高斯隶属函数的具体定义为:
16、
17、式中:σ为模糊集合的宽度;μ为模糊集合的中心;在matlab中利用自带函数来定义高斯隶属函数。
18、优选的,在模糊pid控制器中,三个pid参数kp、ki、kd均有相应的模糊规则;根据模糊规则中构建的模糊关系进行模糊推理,得到输出量的模糊变量;采用mamdani模糊推理法进行模糊推理,设a,b为输入量模糊量的模糊集合,c为输出模糊量的模糊集合,根据模糊控制规则进行近似推理,得出输出模糊量z(用模糊集合c表示)为:
19、
20、
21、ri=(aandb)×c
22、式中:×为模糊直积运算;为模糊合成运算。
23、优选的,得到输出模糊量之后进行去模糊化处理,将输出模糊量转化为清晰的具体量,得到的具体量即为pid参数的修正值;去模糊化处理的方法采用最大隶属法、重心法以及加权平均法中任意一种。
24、本发明还公开了一种可重复使用飞行器控制方法,该控制方法应用于上述的可视化平台。
25、本发明具有如下优点:
26、1、本发明通过matlab与flightgear联合仿真,搭建基于数字孪生的飞行器起降过程可视化仿真平台,以实现各类飞行器起降过程姿态与轨迹的可视化,为飞行器起降系统设计与故障诊断提供辅助,重点针对可回收运载火箭起降过程进行建模,优化设计运载火箭姿态控制系统;
27、2、本发明通过采用模糊pid控制对火箭姿态进行控制,系统超调量更小、响应速度更快,兼具准确性、快速性、稳定性,对于外界干扰也具有较强的鲁棒性,满足实际工程中对于火箭姿态的控制的要求。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198533.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表