双模式自动私有公共交通系统的制作方法
- 国知局
- 2024-07-31 23:48:34
本发明涉及一种私有公共交通系统,它由一组车队组成,用于在城市、居民区甚至城际区域内,如一个个人车辆一样,从一个出发地向一个到达地,运送一名或多名乘客。本发明的目的是提供一种对例如公共汽车、地铁或电车等,其效用是不可避免的大众城市公共交通的补充解决方案。其他交通工具例如自行车,滑板车,自助车辆,拼车应用程序等已经发展,它们提供有利但部分的解决方案。在设有路标的路线上已经出现了自治的往返班车,其以低速行驶并在每个站点停靠,以便允许乘客上下车。该解决方案被实施在某些非常确定的路线上,特别是在主要的交通干线上,但是它不允许在私人和友好的个人车辆环境中,从任意一个出发点向任意一个终点移动。本文件中提出的发明克服了所有这些缺点。此外,它提供了一种与堵塞并污染我们的城市并造成反复出现且昂贵的停车问题的个人车辆直接相关的替代方案。本文件中描述的发明提供了一个实用的、合理的、用户友好的、环保的并经济的解决方案并且提供一种“叠加”服务。事实上,对于用户来说,一切都发生,就好像每个人都永久拥有一辆带有私人司机的车辆,这比个人车辆的成本低得多,因为每个车辆每天都被大量的人使用。而且,该系统还提供拼车服务。此外,本发明提供了堵塞并污染城市和居民区的个人车辆的真正替代方案。本发明的目标系统是双模式,因为车辆拥有2种运行模式:-1-城内电动和自动(无驾驶员)模式,这种模式将被用于绝大多数的行驶。-2-城外热学及手动驾驶模式。可选地,手动驾驶的模式2可以电动运行。在自动模式下,前排和后排座椅彼此面对。在手动驾驶模式下,用户在驾驶座椅或两个前排座椅旋转半圈后正常驾驶车辆。2个前排座椅被设计成确保这种旋转功能。
背景技术:
1、自2009年以来,实施所谓自动驾驶汽车的重大发展已经在加利福尼亚州由一家大型美国集团进行了测试。这些车辆最终在没有司机的情况下运行。为了自我定位,这些车辆基本上使用lidar(光检测和测距)装置,通过激光检测和估计距离。它涉及一种发射红外激光多光束的装置,红外激光多光束的反射使得能够生成环境图像。
2、但是,在行驶了数百万公里之后,在2到3级的自动模式下,方向盘后的驾驶者能够重新获得控制权,并且在投入了大量资金后,美国集团已经使市场落后。事实上,2018年11月,在一场新闻发布会时,时任运营商总裁认识到所面临的目标的巨大复杂性,并宣布100%的自动汽车(5级)将永远不会上路并且该目标似乎是乌托邦式的,甚至在某种程度上是一个神话。
3、其他大型集团也追随加利福尼亚的第一家拥有类似无驾驶员汽车目标的运营商,但不得不指出的是,迄今为止,市场上还没有5级(无方向盘无踏板)的无驾驶员汽车解决方案,而且100%自动(5级)汽车的承诺至今仍是一个承诺。
4、一些专家宣布这种类型的车辆在2030年,2040年甚至更晚的时间到来,但他们中的许多人对100%自动的(5级)汽车未来的现实仍然非常保守。此外,根据许多专家的说法,完全自动的个人车辆出现的假设对我们的城市和大都市来说将是一场真正的灾难。这种可能性将导致行驶中和停泊中的个人车辆数量非常显著的增加,并将产生混乱的交通堵塞,导致我们城市的窒息。
5、最接近本发明的现有技术是专利ep2 310 924b1。这份文件描述了一种基本上城市的运输系统,它允许通过光学引导跟随粘在地上的着色条带将一个或多个人从一个地点运送到另一地点,所述着色条带(10)集成有允许定期精确定位的rfid(射频识别radio fréquence identification的首字母缩写)芯片。
6、这种创新表现出一个主要缺点。事实上,如果着色条带(10),在地面上,被雪、冰、沙或任何其他原因所覆盖,本发明就变得不能工作,因为着色条带不再可见,并且在几米的行驶之后,车辆停止。事实上,所引用文件中描述的所述发明不集成有惯性导航仪(1),因此不拥有能够使着色条带(10)数字化和如果着色条带(10)不再可见则跟随一条计算机虚拟条带(20)的装置。
7、在本文件中的本发明克服了这个缺点并且无论大气条件如何,以及无论固定或喷涂在道路上的着色条带(10)有或没有可见性,允许车辆(6)在完全安全的情况下行驶。
技术实现思路
1、本发明由多个车辆组成,其能够将一个或多个人从任何一个出发地向一个选定的目的地(点对点)运送,而这无需驾驶员以完全自动的方式通过光学引导跟随一条固定在集成rfid芯片或应答器的道路上的着色条带,其特征在于每个车辆集成有惯性导航仪,能够管理与车辆的移动相关的所有参数,并且能够通过识别路径的连续点,即所述路径的着色条带的计算机虚拟图像确定所述车辆的路径。每个车辆驶过的路径的数据的集合都被传送到中央计算机系统,其又将所述路径的数据传送到停车场中每个车辆的所有车载计算机。因此,即使着色条带不再可见,通过跟随计算机虚拟着色条带,所述运输系统继续正常运行。
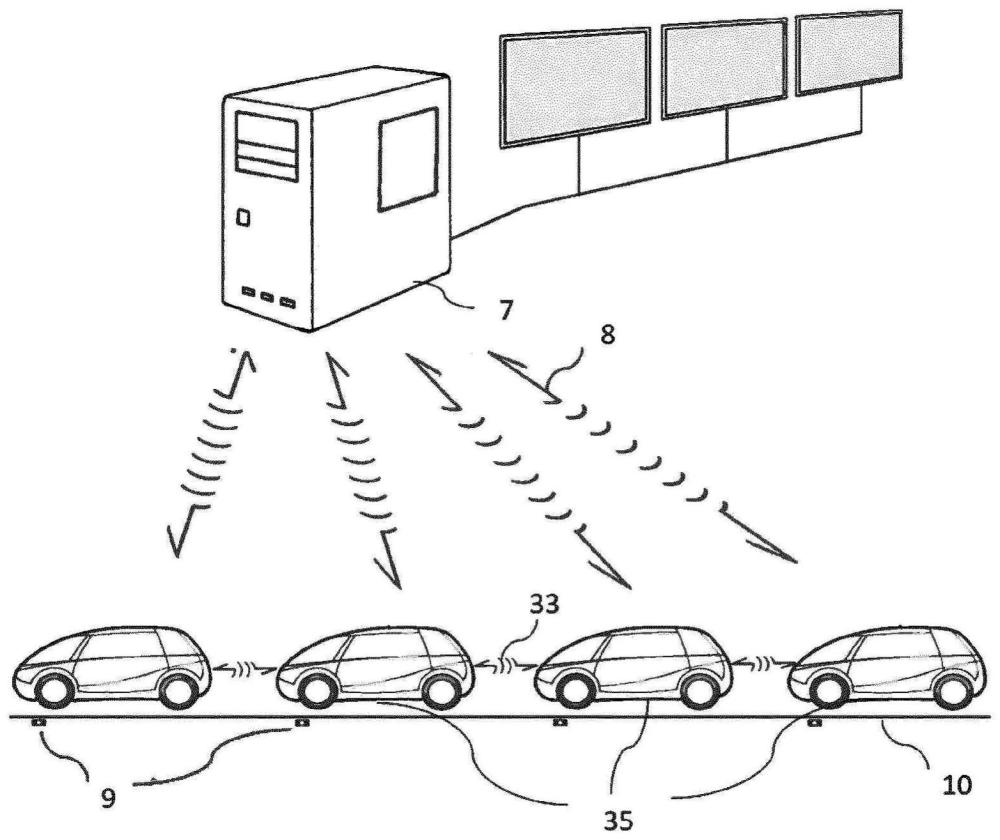
技术特征:1.一种由中央计算机系统(7)管理的自动私有公共交通系统,包括多个车辆(6),所述车辆的充电装置(19),每个车辆(6)配有存储专有程序系统的车载计算机(2)和特别是为了与中央计算机系统(7)通信的通信装置(8),每个车辆(6)配有一组安全传感器,车辆(6)通过光学引导跟随着色条带(10)来进行移动,所述着色条带集成rfid类型的芯片(9)或应答器,每个车辆包括所述rfid芯片的读取装置(13),其特征在于,惯性导航仪(1)能够管理与车辆(6)移动有关的所有参数,即出发点、方向、加速度、持续时间,以及这些不同参数的连续变化,前述数据的处理允许惯性导航仪(1)在车载计算机(2)的帮助下,计算并确定车辆的路径的一系列点,由惯性导航仪(1)所识别的路径的连续的点确定的路段的串联确定了行驶过的路径的着色条带(10)的计算机虚拟图像(20),车载计算机(2)存储所述计算机虚拟图像(20),使得在着色条带(10)不再可见的情况下,车载计算机(2)利用计算机虚拟条带(20)正常地继续跟随预编程的路径。
2.根据权利要求1所述的自动私有公共交通系统,其特征在于,当车辆(6)在充电终端(19)对其电池(38)充电时,再现所行驶路径的着色条带(10)的计算机虚拟图像(20)的每个车辆完成的路径的数据的集合被传送到中央计算机系统(7),随后,计算机系统(7)通过充电终端(19)向停车场的所有车辆(6)重新发送与每个车辆的路径相对应的所述数据的集合,因此所有车辆接收并存储由所有车辆行驶过的所有路径的着色条带(10)的计算机虚拟图像(20)。
3.根据权利要求1所述的自动私有公共交通系统,其特征在于,当由于大气、雪、冰、沙、故意损坏原因或任何其他原因着色条带(10)不可见的情况下,车辆通过跟随计算机虚拟条带(20)正常地继续跟随预编程的路径。
4.根据权利要求1所述的自动私有公共交通系统,其特征在于,惯性导航仪(1)识别路径的点的频率将相对于速度被调整,以便路径的任意路段的两个连续点之间的距离为相同的长度。
5.根据权利要求1所述的自动私有公共交通系统,其特征在于,由路径的各路段的串联产生的虚拟条带(20)由块链认证,因为构成它的每个路段本身都由所述块链认证,路段的任何添加都受到由一组服务器验证的业务加密控制。
6.根据前述权利要求中的任一项所述的自动私有公共交通系统,其特征在于,每次车辆(6)发现相对于由集成在着色条带(10)上的rfid芯片(9)提供的精确位置的漂移,借助于经由控制单元(3)的指导动作,对轨线进行校正,并且惯性导航仪被重新调整到rfid芯片提供的精确坐标。
7.根据权利要求1和5所述的自动私有公共交通系统,其特征在于,每个rfid芯片(9)存储唯一的识别码(11),并且每个唯一识别码对应于存储在车辆(6)的车载计算机(2)中的所述rfid芯片的坐标(x,y,z)。
8.根据前述权利要求中任一项所述的自动私有公共交通系统,其特征在于,当车辆(6)跟随着色条带(10)或相应的计算机虚拟条带(20)组成车队时,领头车辆成为主车辆并经由安全链接(33)在其车载计算机(2)内存储每个车辆的目的地的集合,所述主车辆经由同一安全链接(33)指挥车队的一辆或多辆车辆的加速、制动、障碍物绕行,以及方向改变,通过命令紧随方向改变的单车或多车的车辆减速,以便允许车辆改变车道以加入另一个着色条带(10)或相应的计算机虚拟条带(20)。
9.根据前述权利要求中任一项所述的自动私有公共交通系统,其特征在于,在居民区之外,rfid芯片(9)间隔更大,每隔100至1000米地被固定在不连续着色条带(10)上,rfid芯片(9)短但清晰可见,例如3米长,以便被授权的驾驶员,在所述不连续着色路线上行驶时,惯性导航仪重建行驶过路径的虚拟条带并将惯性导航仪重新调整到车辆行驶过的任何芯片的坐标(x,y,z)。
10.根据权利要求1所述的自动私有公共交通系统,其特征在于,车载计算机(2)以及中央计算机系统(7)配备有与程序系统和ai增强智能算法相关联的专家系统,它允许存储与路径和所有可能情况有关的信息的集合,以便整合在使用过程中获得的经验,这允许人工智能能够做出与经验丰富的人相同的决定。
11.根据权利要求1和10所述的自动私有公共交通系统,其特征在于,同时运行的惯性导航仪的数量被增倍以获得高水平的可靠性,为此,车载计算机(2)与存储决策理论算法的ai组合,检查由每个所述惯性导航仪(1)提供的数据的一致性,以便ai在所有可预见的情况下做出最佳决策。
12.根据权利要求1所述的自动私有公共交通系统,其特征在于,当车辆(6)在特定充电终端(19)上充电时,车轮楔(39)和光学引导使得所述车辆能够精确地定位在终端(19)的前面,耦合装置基本上由公插头(22)、导向装置(23)、半刚性活动臂(24)组成,臂(24)致动装置由其轴上装有滑轮(28)的电动马达(27)构成,所述滑轮通过与联接螺母(29)的第二滑轮协作的皮带来驱动螺母(29),马达的旋转(27)导致螺母(29)旋转,所述螺母的旋转导致与臂(24)联接的螺杆(34)的平移,所述臂被向母引导件(26)驱动,公引导件包括圆柱形部分(30),其上固定有3个引导件(31)和(32),公引导件与配有容纳引导件(31)和(32)的专用凹槽的相应母引导件(26)协作,一旦插头(22)和(25)被连接,路径的数据首先通过有线链接或光纤被传送到中央计算机(7),随后电池(38)充电被执行。
13.根据权利要求1和6所述的自动私有公共交通系统,其特征在于,精确的地理定位网络的部署供任何类型的运营商或应用程序使用,特别是在运输、自动穿梭车或任何类型的车辆领域,拥有与计算机协作的rfid天线(13)的授权运营商能够读取rfid芯片的任何唯一标识符(11)并确定其坐标(x、y、z)。
14.根据前述权利要求中任一项所述的自动私有公共交通系统,其特征在于,所述系统是双模式的,因为它拥有两种运行模式:市内电且自动模式,或市外热且手动驾驶模式;在手动驾驶模式下,前排座椅旋转半圈,所述前排座椅被设计以确保该旋转功能。
技术总结自动私有公共交通系统,包括多个车辆(6),车辆(6)通过光学引导跟随着色条带(10)来工作,每个车辆包括惯性导航仪(1)能够管理与车辆(6)移动有关的所有参数,即出发点、方向、加速度、持续时间,以及这些不同参数的连续变化,前述数据的处理允许车载计算机(2)计算并确定车辆的路径并对其进行存储,所述路径的数据再现所述路径的一系列点,即行驶过的路径的着色条带(10)的计算机虚拟图像(20)。因此,车载计算机(2)在着色条带(10)不再可见的情况下利用所述计算机虚拟图像(20)继续跟随它的路径。技术研发人员:拉乌尔·帕里安蒂受保护的技术使用者:拉乌尔·帕里安蒂技术研发日:技术公布日:2024/6/20本文地址:https://www.jishuxx.com/zhuanli/20240730/198608.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表