基于无人机轨迹优化的雾计算方法、设备、介质及产品
- 国知局
- 2024-07-31 23:52:15
本发明涉及无线通信,特别是涉及一种基于无人机轨迹优化的雾计算方法、设备、介质及产品。
背景技术:
1、近年来,无人机凭借其灵活性强、快速部署等特点,广泛应用于雾计算场景中。面向无人机的雾计算技术通过无人机搭载雾计算设备,赋予雾计算平台可移动、灵活部署等优点,能有效克服地理因素带来的通信障碍,在灾后救援、无人区等网络设施不完善的地区可以为地面终端提供更加高效可靠的服务。但在传统问题解决方案中对问题的关注还不够全面,例如仅考虑了一架无人机的情况、没有考虑无人机的能耗问题,单独考虑无人机路径或任务调度场景等。
2、鉴于此,在雾计算网络中,如何确定多架无人机的路径规划和任务卸载策略,成为本领域技术人员亟待解决的问题。
技术实现思路
1、本发明的目的是提供一种基于无人机轨迹优化的雾计算方法、设备、介质及产品,可实现无人机在执行地面任务时的协同作战和高效计算。
2、为实现上述目的,本发明提供了如下方案:
3、第一方面,本发明提供了一种基于无人机轨迹优化的雾计算方法,包括:
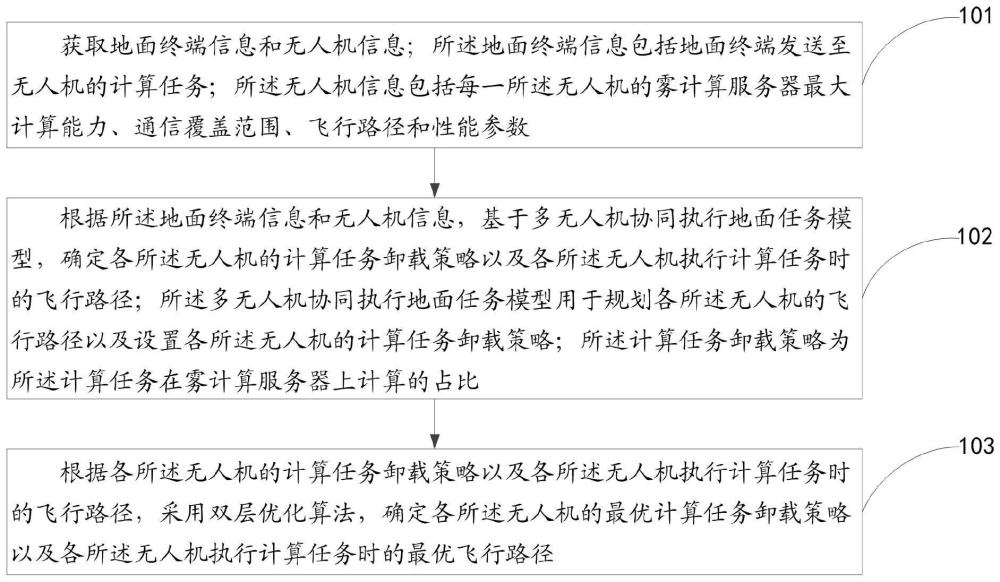
4、获取地面终端信息和无人机信息;所述地面终端信息包括地面终端发送至无人机的计算任务;所述无人机信息包括每一所述无人机的雾计算服务器最大计算能力、通信覆盖范围、飞行路径和性能参数。
5、根据所述地面终端信息和无人机信息,基于多无人机协同执行地面任务模型,确定各所述无人机的计算任务卸载策略以及各所述无人机执行计算任务时的飞行路径;所述多无人机协同执行地面任务模型用于规划各所述无人机的飞行路径以及设置各所述无人机的任务卸载策略;所述任务卸载策略为所述计算任务在雾计算服务器上计算的占比。
6、根据各所述无人机的计算任务卸载策略以及各所述无人机执行计算任务时的飞行路径,采用双层优化算法,确定各所述无人机的最优计算任务卸载策略以及各所述无人机执行计算任务时的最优飞行路径。
7、可选地,所述无人机的性能参数包括悬停高度、飞行速度、飞行速率、悬停功率、通信功率和位置坐标。
8、可选地,根据各所述无人机的计算任务卸载策略以及各所述无人机执行计算任务时的飞行路径,采用双层优化算法,确定各所述无人机的最优计算任务卸载策略以及各所述无人机执行计算任务时的最优飞行路径,具体包括:
9、根据各所述无人机的计算任务卸载策略以及各所述无人机执行计算任务时的飞行路径,构建无人机飞行路径与任务卸载策略的联合优化模型。
10、将当前迭代次数对应的各所述无人机的计算任务卸载策略设置为已知项,将所述联合优化模型转化为无人机飞行路径优化模型。
11、基于所述无人机飞行路径优化模型,采用改进的蚁群算法,确定当前迭代次数对应的各所述无人机执行计算任务时的最优飞行路径。
12、将当前迭代次数对应的各所述无人机执行计算任务时的飞行路径设置为已知项,将所述联合优化模型转化为无人机任务卸载策略优化模型。
13、基于所述无人机任务卸载策略优化模型,采用改进的樽海鞘群算法,确定当前迭代次数对应的各所述无人机的最优计算任务卸载策略。
14、若当前迭代次数为设定的最大迭代次数,则设置当前迭代次数对应的各所述无人机执行计算任务时的最优飞行路径和最优计算任务卸载策略为最终输出参数。
15、若当前迭代次数不是设定的最大迭代次数,将当前迭代次数对应的各所述无人机的最优计算任务卸载策略更新为当前迭代次数对应的各所述无人机的计算任务卸载策略,并执行步骤:将当前迭代次数对应的各所述无人机的计算任务卸载策略设置为已知项,将所述联合优化模型转化为无人机飞行路径优化模型,直到输出最终需要的参数。
16、可选的,所述无人机任务卸载策略优化模型具体为:
17、
18、其中,τ表示各无人机任务处理时间的最大值;表示任务卸载策略的占比;c1和c2分别表示所述无人机任务卸载策略优化模型的两个约束条件;μk,m=1表示完全卸载给无人机,μk,m=0表示完全在本地计算,pm表示飞行路径;fmax表示无人机的最大计算能力;fk,m表示第m个无人机雾节点所搭载的雾计算设备分配给第n个地面终端的计算资源;表示地面终端的集合;表示当第m个无人机雾节点在第n个路径点时,无人机以自身所在位置为圆心,以覆盖范围r为半径划分出的地面终端集合。
19、可选的,所述无人机飞行路径优化模型具体为:
20、
21、其中,τ表示各无人机任务处理时间的最大值;pm表示飞行路径;c3、c4和c5分别表示所述无人机飞行路径优化模型的三个约束条件;表示路径点集合,表示无人机的飞行路径上的第n个点;r表示无人机的通信覆盖范围;表示地面终端和第m个无人机雾节点之间的水平距离;表示地面终端的集合;表示无人机集合,pi表示无人机的初始水平坐标;表示无人机的飞行路径起点,em表示无人机的能耗,emax表示无人机的最大能耗;表示当第m个无人机雾节点在第n个路径点时,无人机以自身所在位置为圆心,以覆盖范围r为半径划分出的地面终端集合。
22、可选的,所述多无人机协同执行地面任务模型具体为:
23、
24、其中,τ表示各无人机任务处理时间的最大值;μk,m表示任务taskk是否卸载给无人机um,μk,m=1表示完全卸载给无人机,μk,m=0表示完全在本地计算;表示任务taskk在本地计算的任务处理时间;表示任务taskk完全卸载给无人机um的任务处理时间;表示当um在第n个路径点时,无人机以自身所在位置为圆心,以覆盖范围r为半径划分出的地面终端集合,lm表示无人机um的飞行路径总长度;表示路径点集合。
25、可选地,所述双层优化算法为基于改进的蚁群算法和樽海鞘群算法的双层优化算法。
26、第二方面,本发明提供了一种计算机设备,包括:存储器、处理器以存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序以实现第一方面所述一种基于无人机轨迹优化的雾计算方法的步骤。
27、第三方面,本发明提供了一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现第一方面所述一种基于无人机轨迹优化的雾计算方法的步骤。
28、第四方面,本发明提供了一种计算机程序产品,包括计算机程序,该计算机程序/指令被处理器执行时实现第一方面所述一种基于无人机轨迹优化的雾计算方法的步骤。
29、根据本发明提供的具体实施例,本发明公开了以下技术效果:
30、本发明提供了一种基于无人机轨迹优化的雾计算方法、设备、介质及产品,其中方法包括:首先,获取地面终端信息和无人机信息。然后,根据这些信息,使用多无人机协同执行地面任务模型来确定每个无人机的计算任务卸载策略和飞行路径。为了实现这一目标,将采用双层优化算法。通过这种方式,确定每个无人机的最优计算任务卸载策略和飞行路径。本发明通过联合优化多个无人机的飞行路径和任务卸载策略,实现了系统全部任务完成时延的最小化,从而提高了地面终端计算任务的处理效率。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198909.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。