一种仿生机器海豚的控制方法、装置及设备
- 国知局
- 2024-07-31 23:52:33
本发明涉及仿生机器人控制,特别是指一种仿生机器海豚的控制方法、装置及设备。
背景技术:
1、传统船只和潜水艇通常采用螺旋桨为推进机构,不仅发出极大噪声,而且机械做功的一部分能量在传导和克服阻力过程中消耗以及传统桨叶旋转时会伤害水中生物。目前,仿生类水下机器人大部分以鱼类为基础,根据不同的水生生物的外形和推进模式,设计外壳以及推进结构。推进模式可分为中央鳍/对鳍推进模式和身体/尾鳍推进模式两大类,其中,中央鳍/对鳍推进模式具有较高的航行稳定性,而身体/尾鳍推进模式则能够实现较高的航行速度,推进性能、能量利用效率更高,同时,身体/尾鳍推进模式还可以消除螺旋桨产生的巨大噪声,具有很好的隐蔽效果。海豚依靠尾巴和尾鳍摆动提供主要动力,其推进模式为典型的身体/尾鳍推进模式,通过尾部的弯曲运动带动尾鳍摆动,在游进过程中, 海豚尾鳍游动的轨迹可近似视为按正弦规律变化的曲线。
2、为了真实地还原海豚的运动姿态,现有的仿生机器海豚大多采用多关节模块驱动方式,每个关节模块内部均设有动力装置,动力装置能够根据控制指令,并结合当前的环境对仿生机器的运动状态进行即时调整。在此过程中,由于需要同时控制仿生机器海豚的多个动力装置相互配合工作,采用传统的控制方式不能对控制指令做出及时响应,使得仿生机器海豚的运动性能不高。
技术实现思路
1、本发明提供一种仿生机器海豚的控制方法、装置及设备,提高了仿生机器海豚的运动性能。
2、为解决上述技术问题,本发明的技术方案如下:
3、一种仿生机器海豚的控制方法,包括:
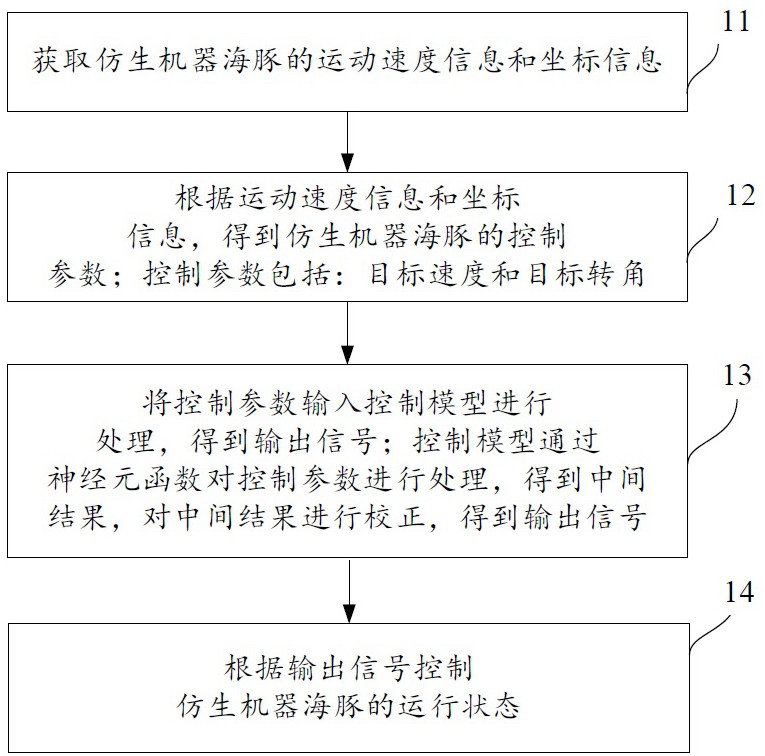
4、获取仿生机器海豚的运动速度信息和坐标信息;
5、根据所述运动速度信息和所述坐标信息,得到所述仿生机器海豚的控制参数;所述控制参数包括:目标速度增量和目标转角;
6、将所述控制参数输入控制模型进行处理,得到输出信号;所述控制模型通过神经元函数对控制参数进行处理,得到中间结果,对所述中间结果进行校正,得到输出信号;
7、根据所述输出信号控制所述仿生机器海豚的运行状态。
8、可选地,根据所述运动速度信息和所述坐标信息,得到所述仿生机器海豚的控制参数,包括:
9、根据所述运动速度信息和所述坐标信息,通过算式:
10、,得到目标速度增量;
11、其中,为目标速度增量,x2、y2、z2为目标位置坐标数据,x1、y1、z1为所述仿生机器海豚的当前位置坐标数据,t为预设时间数据,为所述仿生机器海豚的当前运动速度;
12、通过算式:
13、,得到目标转角;
14、其中,为目标转角,为所述仿生机器海豚的当前运动速度向量,为所述仿生机器海豚的目标位置向量。
15、可选地,所述控制模型通过神经元函数对控制参数进行处理,得到中间结果,对所述中间结果进行校正,得到输出信号,包括:
16、将所述控制参数,输入控制模型通过神经元函数进行加权处理,得到中间结果;
17、对所述中间结果进行校正,得到电流强度控制信号和通电时间区间控制信号;所述电流强度控制信号和通电时间区间控制信号,用于控制所述仿生机器海豚的姿态调整装置和驱动装置运动。
18、可选地,将所述控制参数,输入控制模型通过神经元函数进行加权处理,得到中间结果,包括:
19、所述控制模型通过神经元函数:
20、
21、对控制参数进行处理,得到中间结果;
22、其中,f (ni)为中间结果;ni=ai∙x+d1i,1≤i≤j,j为第一隐藏层中的神经元数量;ai=[],为输入层到第一隐藏层的权值;x=[x1,x2]为输入向量,x1=,x2=;d1i为第一隐藏层中神经元偏置值的权重;a为参量,0<a<1。
23、可选地,对所述中间结果进行校正,得到电流强度控制信号和通电时间区间控制信号,包括:
24、根据所述中间结果,通过算式:
25、
26、确定偏差数据,其中,e为偏差数据;为预期结果;
27、根据所述偏差数据,对所述中间结果进行校正,得到电流强度控制信号和通电时间区间控制信号。
28、可选地,根据所述偏差数据,对所述中间结果进行校正,得到电流强度控制信号和通电时间区间控制信号,包括:
29、根据所述偏差数据,通过算式:
30、
31、确定第二隐藏层到输出层的权值和第二隐藏层中神经元偏置值的权重,其中,为第二隐藏层到输出层的权值,m=1,2;为第二隐藏层中神经元偏置值的权重;为学习率;
32、根据所述第二隐藏层到输出层的权值和第二隐藏层中神经元偏置值的权重,通过所述神经元函数,得到电流强度控制信号和通电时间区间控制信号。
33、可选地,根据所述输出信号控制所述仿生机器海豚的运行状态,包括:
34、根据所述电流强度控制信号和通电时间区间控制信号,生成控制脉冲信号;
35、根据所述控制脉冲信号,控制所述仿生机器海豚的运行状态。
36、本发明的实施例还提供一种仿生机器海豚的控制装置,所述装置包括:
37、获取模块,用于获取仿生机器海豚的运动速度信息和坐标信息;
38、生产模块,用于根据所述运动速度信息和所述坐标信息,得到所述仿生机器海豚的控制参数;所述控制参数包括:目标速度增量和目标转角;
39、确定模块,用于将所述控制参数输入控制模型进行处理,得到输出信号;所述控制模型通过神经元函数对控制参数进行处理,得到中间结果,对所述中间结果进行校正,得到输出信号;
40、控制模块,用于根据所述输出信号控制所述仿生机器海豚的运行状态。
41、可选地,根据所述运动速度信息和所述坐标信息,得到所述仿生机器海豚的控制参数,包括:
42、根据所述运动速度信息和所述坐标信息,通过算式:
43、,得到目标速度增量;
44、其中,为目标速度增量,x2、y2、z2为目标位置坐标数据,x1、y1、z1为所述仿生机器海豚的当前位置坐标数据,t为预设时间数据,为所述仿生机器海豚的当前运动速度;
45、通过算式:
46、,得到目标转角;
47、其中,为目标转角,为所述仿生机器海豚的当前运动速度向量,为所述仿生机器海豚的目标位置向量。
48、可选地,所述控制模型通过神经元函数对控制参数进行处理,得到中间结果,对所述中间结果进行校正,得到输出信号,包括:
49、将所述控制参数,输入控制模型通过神经元函数进行加权处理,得到中间结果;
50、对所述中间结果进行校正,得到电流强度控制信号和通电时间区间控制信号;所述电流强度控制信号和通电时间区间控制信号,用于控制所述仿生机器海豚的姿态调整装置和驱动装置运动。
51、可选地,将所述控制参数,输入控制模型通过神经元函数进行加权处理,得到中间结果,包括:
52、所述控制模型通过神经元函数:
53、
54、对控制参数进行处理,得到中间结果;
55、其中,f (ni)为中间结果;ni=ai∙x+d1i,1≤i≤j,j为第一隐藏层中的神经元数量;ai=[],为输入层到第一隐藏层的权值;x=[x1,x2]为输入向量,x1=,x2=;d1i为第一隐藏层中神经元偏置值的权重;a为参量,0<a<1。
56、可选地,对所述中间结果进行校正,得到电流强度控制信号和通电时间区间控制信号,包括:
57、根据所述中间结果,通过算式:
58、
59、确定偏差数据,其中,e为偏差数据;为预期结果;
60、根据所述偏差数据,对所述中间结果进行校正,得到电流强度控制信号和通电时间区间控制信号。
61、可选地,根据所述偏差数据,对所述中间结果进行校正,得到电流强度控制信号和通电时间区间控制信号,包括:
62、根据所述偏差数据,通过算式:
63、
64、确定第二隐藏层到输出层的权值和第二隐藏层中神经元偏置值的权重,其中,为第二隐藏层到输出层的权值,m=1,2;为第二隐藏层中神经元偏置值的权重;为学习率;
65、根据所述第二隐藏层到输出层的权值和第二隐藏层中神经元偏置值的权重,通过所述神经元函数,得到电流强度控制信号和通电时间区间控制信号。
66、可选地,根据所述输出信号控制所述仿生机器海豚的运行状态,包括:
67、根据所述电流强度控制信号和通电时间区间控制信号,生成控制脉冲信号;
68、根据所述控制脉冲信号,控制所述仿生机器海豚的运行状态。
69、本发明的实施例还提供一种计算设备,包括:处理器、存储有计算机程序的存储器,所述计算机程序被处理器运行时,执行上述的方法。
70、本发明的实施例还提供一种计算机可读存储介质,存储有指令,当所述指令在计算机上运行时,使得计算机执行上述的方法。
71、本发明的上述方案至少包括以下有益效果:
72、本发明的方案通过获取仿生机器海豚的运动速度信息和坐标信息;根据运动速度信息和坐标信息,得到仿生机器海豚的控制参数;控制参数包括:目标速度增量和目标转角;将控制参数输入控制模型进行处理,得到输出信号;控制模型通过神经元函数对控制参数进行处理,得到中间结果,对中间结果进行校正,得到输出信号;根据输出信号控制仿生机器海豚的运行状态,实现了仿生机器海豚运动时能够对控制指令做出及时响应,提高了仿生机器海豚的运动性能,使仿生机器海豚的运动更加自然、高效和灵活。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198930.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表