一种非对称调平装置及其使用方法
- 国知局
- 2024-08-01 00:05:45
本发明属于工程应用,更具体地,涉及一种非对称调平装置及其使用方法。
背景技术:
1、在机械制造过程中,大部分机械设备都需要一个稳定、可靠的基准平台,而手动调平会有一定的误差且时间长。目前,大多数调平采用的是三点式、四点式或者六点式的调平方式,而三点式调平的稳定性和抗倾覆能力较差,六点式成本较高且更为复杂,因此选用调平精度较高的四点式调平。国内采用的调平方式大多为对称式四点调平,而在一些特殊情况下,机械设备所需要的平面为不规则的。因此,开发一款自动化程度高的非对称调平装置具有十分重要的实际意义。
技术实现思路
1、提供了本发明以解决现有技术中存在的上述问题。因此,需要一种非对称调平装置,用于大型机械设备的非对称基准平台的自动调平。本发明就其硬件系统、软件系统以及误差分析展开研究。本发明采用下位机与上位机结合的方式完成系统设计,下位机实现操作指令的接收、液压支腿上升、自动调平以及结果发送等功能。上位机提供人机操作窗口,实现通过发送操作指令来控制下位机动作,并实时显示数据等功能。
2、根据本发明的第一方案,提供一种非对称调平装置,包括:
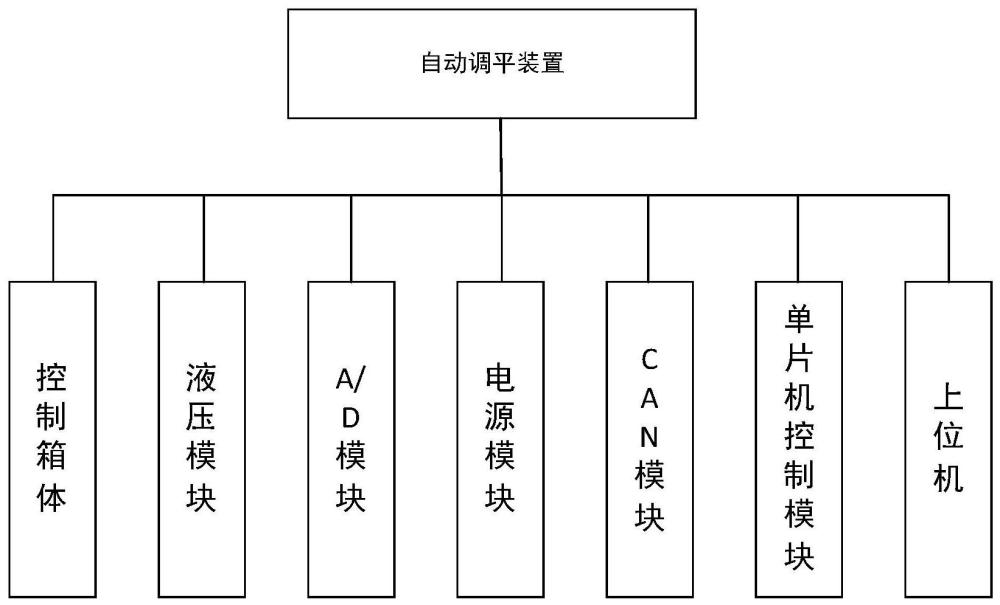
3、包括:液压模块、控制箱体和上位机;
4、其中,
5、所述控制箱体,用来安装控制电路;
6、所述液压模块,用于控制四个液压支腿的支撑和收缩的程度
7、所述上位机,用于发送指令以及实时显示调平结果。
8、进一步地,所述控制箱体内部设置有电源模块、can模块、单片机控制模块以及a/d模块;
9、所述电源模块,用于给控制箱体和内部的控制电路供电;
10、所述can模块与所述单片机控制模块连接,用于传输横滚和纵摇的角度;
11、所述单片机控制模块通过can模块连接倾角传感器,用于控制液压模块实现调平;
12、所述a/d模块,用于传输左前、左后、右前、右后液压支腿受力情况;。
13、进一步地,所述单片机控制模块设置有i/o口,所述i/o口线连接所述液压模块;所述单片机上设置有通信接口,所述单片机控制模块通过所述通信接口与所述上位机信号连接。
14、进一步地,所述单片机上设置有数据总线,所述数据总线与所述ad模块及d/a装置连接。
15、进一步地,所述液压模块包含左前、左后、右前、右后四个垂直液压支腿油缸,通过d/a装置控制液压泵及比例换向阀控制支腿支撑或收缩的程度。
16、进一步地,所述液压模块的垂直液压支腿为非对称设置,每个垂直支腿上固定倾角传感器。
17、进一步地,在液压支腿上升及调平时,左前支腿和左后支腿上升到指定高度,根据左前支腿和左后支腿上的双轴倾角传感器传输的角度,设置上升高度较高的支腿为基准,根据各支腿上的双轴倾角传感器传输的数据控制其他支腿的上升。
18、根据本发明的第二技术方案,提供一种如上所述的非对称调平装置的使用方法,所述方法包括:
19、将液压装置与控制箱连接,并采用24v的直流电压电源为控制箱供电;
20、采用串口rs232将上位机与单片机控制模块建立通讯,通过人机交互操作界面向单片机控制模块发送指令,单片机控制液压装置实现平台的上升及调平,并将调平情况反馈给上位机;
21、单片机控制模块根据上位机发送的指令及can模块传输的数据进行分析,通过d/a转换控制液压装置的液压泵及比例换向阀实现液压支腿的上升或下降,从而完成平台的调平;
22、调平结束后,各液压支腿的受力情况,通过a/d模块进行a/d转换反馈至单片机控制模块,并经串口rs232传输至上位机。
23、进一步地,上位机可设置调平的高度,实时显示各支腿的受力情况和显示最终调平结果。
24、本发明至少具有以下有益效果:
25、在大型机械设备中,基准平台需要承载一定的负载,本发明采用四点调平的方法,具有较高的稳定性和抗倾覆能力;采用液压驱动能够承载较大的负载,结构紧凑,可靠性高。本发明采用先上升两条支腿,以其中一条支腿为基准,再对其他三条支腿进行调平,提高了调平的速率;在四条液压支腿上设置双轴倾角传感器和压力传感器,根据两条支腿上传输的横滚和纵摇的角度及各支腿的受力情况,及时调整单片机控制输出信号,提高调平的精度。本发明采用的非对称的结构特点,可以应用于一些特殊情况,适用范围较广;可通过上位机进行调平高度的设置,且调平过程中能实时反馈各支腿受力情况及最后显示调平的结果,对大型机械设备的自动化发展具有深远意义。
技术特征:1.一种非对称调平装置,其特征在于,包括:液压模块、控制箱体和上位机;
2.根据权利要求1所述的非对称调平装置,其特征在于,所述控制箱体内部设置有电源模块、can模块、单片机控制模块以及a/d模块;
3.根据权利要求2所述的非对称调平装置,其特征在于,所述单片机控制模块设置有i/o口,所述i/o口线连接所述液压模块;所述单片机控制模块设置有通信接口,所述单片机控制模块通过所述通信接口与所述上位机信号连接。
4.根据权利要求1所述的非对称调平装置,其特征在于,所述液压模块包含左前、左后、右前、右后四个垂直液压支腿油缸,通过d/a装置控制液压泵及比例换向阀控制支腿支撑或收缩的程度。
5.根据权利要求2所述的非对称调平装置,其特征在于,所述单片机控制模块上设置有数据总线,所述数据总线与所述a/d模块及d/a装置连接。
6.根据权利要求1所述的非对称调平装置,其特征在于,所述液压模块的垂直液压支腿为非对称设置,每个垂直支腿上固定倾角传感器。
7.一种如权利要求1至6中任一项所述的非对称调平装置的使用方法,其特征在于,所述方法包括:
8.根据权利要求7所述的使用方法,其特征在于,上位机可设置调平的高度,实时显示各支腿的受力情况和显示最终调平结果。
9.根据权利要求7所述的使用方法,其特征在于,在液压支腿上升及调平时,左前支腿和左后支腿上升到指定高度,根据左前支腿和左后支腿上的双轴倾角传感器传输的角度,设置上升高度较高的支腿为基准,根据各支腿上的双轴倾角传感器传输的数据控制其他支腿的上升。
技术总结本发明公开一种非对称调平装置及其使用方法,该装置包括:CAN模块,所述CAN模块连接所述单片机控制模块,用于传输横滚和纵摇的角度;液压模块,用于驱动调平支腿支撑或收缩;单片机控制模块,所述单片机控制模块通过CAN模块连接倾角传感器,以控制液压模块实现调平;A/D模块,用于传输左前、左后、右前、右后支腿受力情况;上位机,所述上位机与所述单片机控制模块信号连接。本发明用于大型机械设备的非对称基准平台的自动调平。技术研发人员:侯润民,高强,钱雅婷,严来福,姬玉莹受保护的技术使用者:南京理工大学技术研发日:技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240730/199638.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。