一种物料搬运方法、装置、移动机器人及存储介质与流程
- 国知局
- 2024-08-01 00:05:44
本技术涉及机器人,特别是涉及一种物料搬运方法、装置、移动机器人及存储介质。
背景技术:
1、随着机器人技术的发展,机器人被广泛应用于企业生产环节,代替人工执行物料搬运任务。在利用agv(automated guided vehicl,自动导引运输车)进行不同辊筒输送线间的物料搬运时,agv需要对接物料当前所在的辊筒输送线,以便物料被传送至agv仓位内,之后,agv将物料输送至目标位置,并利用辊筒的转动将仓位内的物料传输给目标辊筒传输线。
2、在agv搬运物料的过程中,物料可能因为agv加速行驶、agv行驶路径不平坦等多种原因从agv仓位内掉落。为了解决该问题,可以在仓位两端的辊筒外侧安装挡料器,在agv搬运物料的过程中阻挡物料,防止物料掉落。
3、然而,在实际搬运过程中,物料将随着agv的运动而不断撞击挡料器,导致物料与挡料器的损坏,防止物料掉落的效果并不理想。
技术实现思路
1、本技术实施例的目的在于提供一种物料搬运方法、装置、移动机器人及存储介质,以防止物料掉落,避免物料损坏。具体技术方案如下:
2、第一方面,本技术实施例提供了一种物料搬运方法,应用于移动机器人,所述移动机器人包括至少一个仓位,每个仓位内并排排列有多个辊筒,所述方法包括:
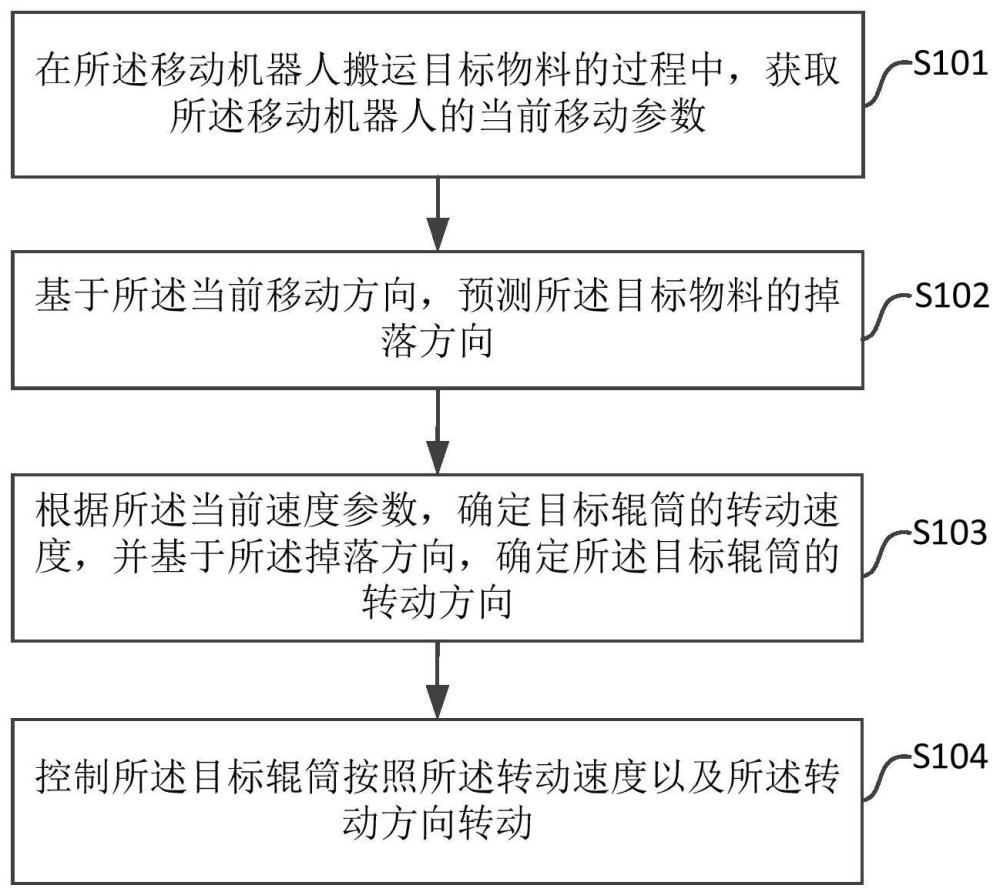
3、在所述移动机器人搬运目标物料的过程中,获取所述移动机器人的当前移动参数,其中,所述当前移动参数包括当前移动方向和当前速度参数;
4、基于所述当前移动方向,预测所述目标物料的掉落方向;
5、根据所述当前速度参数,确定目标辊筒的转动速度,并基于所述掉落方向,确定所述目标辊筒的转动方向,其中,所述目标辊筒包括目标仓位的与所述掉落方向对应的一端的辊筒,所述目标仓位为所述目标物料所在的仓位;
6、控制所述目标辊筒按照所述转动速度以及所述转动方向转动。
7、可选的,所述每个仓位的目标位置具有位置传感器,所述目标位置包括所述多个辊筒的排列方向上的两端;所述方法还包括:
8、在检测到所述目标辊筒对应的位置传感器被触发时,控制所述移动机器人停止移动。
9、可选的,所述方法还包括:
10、在所述移动机器人停止移动后,返回控制所述目标辊筒按照所述转动速度以及所述转动方向转动的步骤,直至检测到所述目标辊筒对应的位置传感器停止触发,控制所述移动机器人继续移动。
11、可选的,所述当前移动方向与所述多个辊筒的排列方向平行,所述当前速度参数包括当前加速度;
12、所述基于所述当前移动方向,预测所述目标物料的掉落方向的步骤,包括:
13、在基于所述当前加速度确定所述移动机器人在加速运动时,根据所述当前移动方向和所述当前加速度,预测所述目标物料的掉落方向。
14、可选的,所述当前移动方向与所述多个辊筒的排列方向垂直;
15、所述基于所述当前移动方向,预测所述目标物料的掉落方向的步骤,包括:
16、将所述多个辊筒的排列方向上的两端中的至少一端,确定为所述目标物料的掉落方向。
17、可选的,所述每个仓位的目标位置具有位置传感器,所述目标位置包括所述多个辊筒的排列方向上的两端;
18、所述将所述多个辊筒的排列方向上的两端中的至少一端,确定为所述目标物料的掉落方向的步骤,包括:
19、在检测到所述位置传感器被触发时,将被触发的位置传感器对应的所述多个辊筒的排列方向上的一端,确定为所述目标物料的掉落方向;或,
20、将所述多个辊筒的排列方向上的两端,确定为所述目标物料的掉落方向。
21、可选的,所述当前速度参数包括当前速度;
22、所述根据所述当前速度参数,确定目标辊筒的转动速度,并基于所述掉落方向,确定所述目标辊筒的转动方向的步骤,包括:
23、根据所述当前速度以及线速度与转动速度之间的关系,确定目标辊筒的转动速度,以使所述目标辊筒的线速度不小于所述当前速度;
24、将所述掉落方向的反方向,确定为所述目标辊筒的转动方向。
25、可选的,所述目标物料为多个,每个目标物料在所述目标仓位内对应于一个放置位置,所述放置位置的排列方向与所述多个辊筒的排列方向相同,所述目标辊筒包括每个放置位置的与所述掉落方向对应的一端的辊筒,所述每个仓位的目标位置具有位置传感器,所述目标位置包括每个放置位置在所述排列方向上的两端;
26、所述方法还包括:
27、在所述移动机器人搬运目标物料的过程中,若检测到所述目标辊筒对应的位置传感器均未被触发,检测所述每个放置位置的与所述掉落方向相反的一端的位置传感器是否被触发;
28、若存在位置传感器被触发,基于所述当前移动参数,确定被触发的位置传感器对应的辊筒的第一转动方向和第一转动速度;
29、控制所述被触发的位置传感器对应的辊筒按照所述第一转动方向以及所述第一转动速度转动;
30、若检测到所述目标辊筒对应的位置传感器存在被触发的位置传感器,控制所述移动机器人停止移动。
31、可选的,在所述获取所述移动机器人的当前移动参数的步骤之前,所述方法还包括:
32、控制所述移动机器人移动至目标物料所在的接料位置,并控制靠近所述接料位置一端的辊筒按照第一预设转动速度向第二转动方向转动,以使所述目标物料进入所述目标仓位内。
33、可选的,所述控制靠近所述接料位置一端的辊筒按照第一预设转动速度向第二转动方向转动的步骤,包括:
34、控制除末端辊筒之外的各空余辊筒,按照第一预设转动速度向第二转动方向转动,并控制所述末端辊筒,按照第二预设转动速度向所述第二转动方向的反方向转动;
35、其中,所述末端辊筒为所述多个辊筒中距离所述接料位置最远的辊筒。
36、可选的,所述每个仓位的目标位置具有位置传感器,所述目标位置包括所述多个辊筒的排列方向上的每个辊筒的两侧;
37、所述控制除末端辊筒之外的各空余辊筒,按照第一预设转动速度向第二转动方向转动,并控制所述末端辊筒,按照第二预设转动速度向所述第二转动方向的反方向转动的步骤,包括:
38、针对除末端辊筒之外的各空余辊筒,若检测到相邻两个辊筒之间的位置传感器被触发,则控制该相邻两个辊筒中远离所述进料位置的辊筒,按照第一预设转动速度向第二转动方向转动;
39、在检测到所述末端辊筒与其相邻辊筒之间的位置传感器被触发时,控制所述末端辊筒按照第二预设转动速度向所述第二转动方向的反方向转动。
40、可选的,所述方法还包括:
41、在检测到所述目标仓位远离所述接料位置一端的位置传感器被触发,则控制与所述末端辊筒相邻的辊筒停止转动,直至该位置传感器停止被触发,控制所述末端辊筒停止转动。
42、可选的,所述方法还包括:
43、基于所述目标仓位对应的物料装载量以及各个待装载物料的进料位置,确定所述目标物料对应的放置位置;
44、控制所述目标物料的当前位置对应的辊筒以及所述放置位置对应的辊筒,按照第三预设转动速度向所述第二转动方向的反方向转动,直至检测到所述目标物料的放置位置对应的位置传感器被触发为止。
45、可选的,所述目标仓位对应的物料装载量是多个;所述方法还包括:
46、按照接料顺序,将下一待装载物料作为新的目标物料;
47、将所述下一待装载物料的接料位置一侧的空余辊筒中,靠近已装载物料的放置位置的辊筒,作为新的末端辊筒;
48、返回控制除末端辊筒之外的各空余辊筒,按照第一预设转动速度向第二转动方向转动的步骤。
49、可选的,所述每个仓位的目标位置具有位置传感器,所述目标位置包括所述多个辊筒的排列方向上的两端;所述方法还包括:
50、在检测到所述移动机器人到达送料位置时,控制所述多个辊筒按照第四预设转动速度向第三转动方向转动,以使所述目标物料远离所述目标仓位,直至各位置传感器均未被触发,控制所述多个辊筒停止转动。
51、可选的,所述待配送的目标物料为多个,每个目标物料在所述目标仓位内对应于一个放置位置,所述放置位置的排列方向与所述多个辊筒的排列方向相同;
52、所述在检测到所述移动机器人到达送料位置时,控制所述多个辊筒按照第四预设转动速度向第三转动方向转动的步骤,包括:
53、在到达当前待配送的目标物料对应的送料位置时,控制送料辊筒按照第四预设转动速度向第三转动方向转动,直至所述送料辊筒对应的位置传感器均未被触发,其中,所述送料辊筒为所述当前待配送的目标物料的放置位置对应的辊筒以及所述当前待配送的目标物料的放置位置到所述送料位置之间的辊筒;
54、所述方法还包括:
55、控制除所述送料辊筒外的其他辊筒保持不动。
56、第二方面,本技术实施例提供了一种物料搬运装置,应用于移动机器人,所述移动机器人包括至少一个仓位,每个仓位内并排排列有多个辊筒,所述装置包括:
57、参数获取模块,用于在所述移动机器人搬运目标物料的过程中,获取所述移动机器人的当前移动参数,其中,所述当前移动参数包括当前移动方向和当前速度参数;
58、方向预测模块,用于基于所述当前移动方向,预测所述目标物料的掉落方向;
59、速度确定模块,用于根据所述当前速度参数,确定目标辊筒的转动速度,并基于所述掉落方向,确定所述目标辊筒的转动方向,其中,所述目标辊筒包括目标仓位的与所述掉落方向对应的一端的辊筒,所述目标仓位为所述目标物料所在的仓位;
60、第一控制模块,用于控制所述目标辊筒按照所述转动速度以及所述转动方向转动。
61、第三方面,本技术实施例提供了一种移动机器人,所述移动机器人包括控制器和至少一个仓位,每个仓位内并排排列有多个辊筒,其中:
62、所述控制器,用于在所述移动机器人搬运目标物料的过程中,获取所述移动机器人的当前移动参数,其中,所述当前移动参数包括当前移动方向和当前速度参数;基于所述当前移动方向,预测所述目标物料的掉落方向;根据所述当前速度参数,确定目标辊筒的转动速度,并基于所述掉落方向,确定所述目标辊筒的转动方向;控制所述目标辊筒按照所述转动速度以及所述转动方向转动,其中,所述目标辊筒包括目标仓位的与所述掉落方向对应的一端的辊筒,所述目标仓位为所述目标物料所在的仓位。
63、可选的,所述每个仓位的目标位置具有位置传感器,所述目标位置包括所述多个辊筒的排列方向上的两端;
64、所述控制器,还用于在检测到所述目标辊筒对应的位置传感器触发时,控制所述移动机器人停止移动。
65、第四方面,本技术实施例提供了一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面所述的方法步骤。
66、第五方面,本技术实施例还提供了一种包含指令的计算机程序产品,当其在计算机上运行时,使得计算机执行上述第一方面所述的方法步骤。
67、本技术实施例有益效果:
68、本技术实施例提供的方案应用于移动机器人,该移动机器人包括至少一个仓位,并且,每个仓位内并排排列有多个辊筒。电子设备可以在移动机器人搬运目标物料的过程中,获取移动机器人的当前移动参数,其中,当前移动参数包括当前移动方向和当前速度参数;基于当前移动方向,预测目标物料的掉落方向;根据当前速度参数,确定目标辊筒的转动速度,并基于掉落方向,确定目标辊筒的转动方向,其中,目标辊筒为目标仓位的与掉落方向对应的一端的辊筒,目标仓位为目标物料所在的仓位;进而控制目标辊筒按照转动速度以及转动方向转动。
69、通过预测目标物料的掉落方向,并基于该掉落方向,控制掉落方向对应的一端的辊筒转动,可以在各种行驶环境下,将目标物料精准控制在目标仓位内,防止目标物料掉落,进而,避免因物料掉落损坏目标物料。并且,相比于安装挡料器防止物料掉落的方法,可以避免目标物料在运输过程中与挡料板发生碰撞,进一步避免损坏目标物料。
70、当然,实施本技术的任一产品或方法并不一定需要同时达到以上所述的所有优点。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199635.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表