一种定位台车自动水平面校准装置的制作方法
- 国知局
- 2024-08-01 00:11:22
本技术涉及医疗设备,具体涉及一种定位台车自动水平面校准装置。
背景技术:
1、目前市面上的定位台车,也能做到调整台车高度,台车升起来后,地面不平时,台车会晃动,大多数采用手动调整脚杯的方式,方法处理起来比较困难,调整时间比较长,每一次移动台车需要手动调整,但地面不平的情况几乎没有很好的解决。很多市面上台车大多数也是采用一个升降立柱控制四个脚杯,同时升同时降,就会造成地面不平的情况下,调整起来比较复杂。为此我们提出一种定位台车自动水平面校准装置,用于自动调整台车平衡。台车的定位装置在校准仪器领域比较常见,如中国专利cn103661532b,公开日2016年6月15日,本发明公开了一种台车的定向及定位系统,本发明藉由一连动模块连接一控制单元及各定向单元与定位单元,让用户仅需操作该控制单元即能令所有的定向单元与定位单元作动,但该技术仍然无法实现自动定位,调整起来较为复杂。
技术实现思路
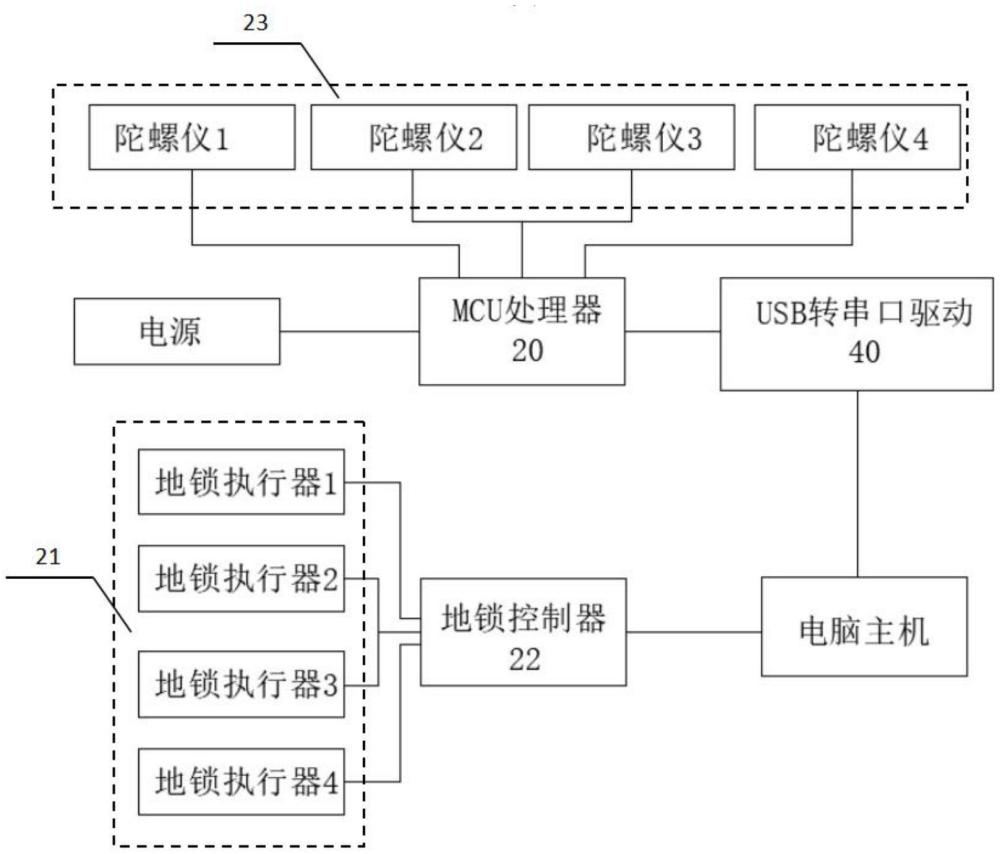
1、本实用新型的目的在于针对现有技术上的缺陷,提出了一种定位台车自动水平面校准装置,包括台车本体及内部控制单元,所述内部控制单元包括mcu处理器、地锁执行器、地锁控制器及陀螺仪,所述台车本体设有至少一定向脚轮,所述脚轮一侧设置有地锁执行器,所述台车本体1设有至少一个角端,所述角端内设有陀螺仪,所述地锁控制器安装于台车本体内,一端通过地锁控制线与地锁执行器连接,另一端通过串口rs232通信与电脑主机连接,所述mcu处理器安装于台车本体内,所述mcu处理器一端通过iic通信与所述陀螺仪连接,另一端通过usb转串口驱动与电脑主机连接。本实用新型能够在地面不平的情况下,当台车上定位发生位置偏差时,利用四个地锁精确定位,采用陀螺仪进行台车的角度测算,测算当前台车的偏移角度,使用偏移角度去自动调整地锁控制器,该方案校准精度高,能够快速自动调整地锁,达到台车平衡。
2、作为优选,所述mcu处理器包括芯片u1,所述芯片u1的第一io口与陀螺仪传感器芯片u3连接,所述芯片u1的第二io口与usb转串口芯片u2连接,所述usb转串口芯片u2的ud口与usb接口j5连接,所述usb接口j5与电脑主机连接。
3、作为优选,所述一个陀螺仪设有一个陀螺仪采集电路,所述陀螺仪采集电路包括陀螺仪传感器芯片u3、电阻r70、电阻r71、电阻r60、电阻r61、电容c60、电容c61、电容c62及电容c63,所述u3的23引脚与电阻r70的一端连接,所述r70的另一端连接电源vcc,所述芯片u3的24引脚与电阻r71的一端连接,所述电阻r71的另一端连接电源vcc,所述芯片u3的12引脚与电阻r60连接,所述芯片u3的1引脚、11引脚、9引脚均接地,所述芯片u3的8引脚与13引脚连接后与电阻r61的一端连接,所述电阻r61的另一端连接电源vcc,所述芯片u3的18引脚接地,所述芯片u3的8引脚与13引脚连接后与电容c61的一端连接,所述电容c61另一端接地,所述芯片u3的8引脚与13引脚连接后与电容c60的一端连接,所述电容c60的另一端接地,所述芯片u3的10引脚与电容c63的一端连接,所述电容c63的另一端接地,所述芯片u3的20引脚与电容c62的一端连接,所述电容c62的另一端接地。
4、作为优选,所述陀螺仪传感器芯片为mpu6050。
5、作为优选,所述台车本体至少包含4个角端,每个角端内设有一个陀螺仪。
6、作为优选,所述台车本体至少包含4个脚轮,所述每个脚轮内侧对应设有地锁执行器。
7、本实用新型的有益效果是:
8、1.本装置能够利用4个地锁精准定位,利用陀螺仪进行台车角度偏差测算,利用偏移角度自动调整地锁控制器,快速自动达到台车平衡。
9、2.利用4路驱动控制器驱动每一路地锁,能够控制单个地锁的调整。
10、3.实时采集数据,消除台车在校准过程中的安全隐患。
技术特征:1.一种定位台车自动水平面校准装置,其特征在于,
2.根据权利要求1所述的一种定位台车自动水平面校准装置,其特征在于,
3.根据权利要求2所述的一种定位台车自动水平面校准装置,其特征在于,
4.根据权利要求3所述的一种定位台车自动水平面校准装置,其特征在于,
5.根据权利要求1所述的一种定位台车自动水平面校准装置,其特征在于,
6.根据权利要求1所述的一种定位台车自动水平面校准装置,其特征在于,
技术总结本技术涉及医疗设备技术领域,具体涉及一种定位台车自动水平面校准装置,包括台车本体及内部控制单元,所述内部控制单元包括MCU处理器、地锁执行器、地锁控制器及陀螺仪,所述台车本体设有脚轮,所述脚轮一侧设置有地锁执行器,所述地锁控制器安装于台车本体内,所述陀螺仪设在台车内部,一端通过地锁控制线与地锁执行器连接,另一端通过串口RS232通信与电脑主机连接,所述MCU处理器安装于台车本体内,所述MCU处理器一端通过IIC通信与所述陀螺仪连接,另一端通过USB转串口驱动与电脑主机连接。本技术本装置能够利用4个地锁精准定位,利用陀螺仪进行台车角度偏差测算,利用偏移角度自动调整地锁控制器,快速自动达到台车平衡。技术研发人员:马震川,任志杰,杨旸,王俊受保护的技术使用者:杭州邦杰星医疗科技有限公司技术研发日:20231109技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240730/199927.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表