一种麻醉泵控制方法、装置、系统及存储介质与流程
- 国知局
- 2024-08-01 00:14:28
本发明实施例涉及医疗电子领域,尤其涉及一种麻醉泵控制方法、装置、系统及存储介质。
背景技术:
1、随着医疗行业智能化的持续推进,能够实现麻醉泵远程控制的麻醉泵控制系统已成为医疗现代化和智能化中不可或缺的一环。
2、在临床实践中,麻醉泵控制系统可自动计算药物输注目标1,并生成用于表征该药物输注目标1的自动信号,以此控制麻醉泵。但是在有些情况下,该药物输注目标1与患者的当前情况并不匹配,这使得麻醉医师需手动输入药物输注目标2至麻醉泵控制系统,以使得麻醉泵控制系统生成用于表征该药物输注目标2的人工信号,以此控制麻醉泵。当然,若后续计算出的药物输注目标1与患者的当前情况匹配,则可再切回至对应的自动信号。
3、但是,在信号切换过程中,例如从人工信号切换至自动信号或从自动信号切换至人工信号过程中,存在信号颠簸问题,亟待解决。
技术实现思路
1、本发明实施例提供了一种麻醉泵控制方法、装置、系统及存储介质,以在麻醉泵控制系统中实现人工信号与自动信号之间的平稳切换。
2、根据本发明的一方面,提供了一种麻醉泵控制方法,该方法应用于麻醉泵控制系统,该麻醉泵控制系统至少包括比例积分微分控制器和一阶惯性模块,该比例积分微分控制器的输入端包括目标信号端和跟踪信号端,该方法包括:
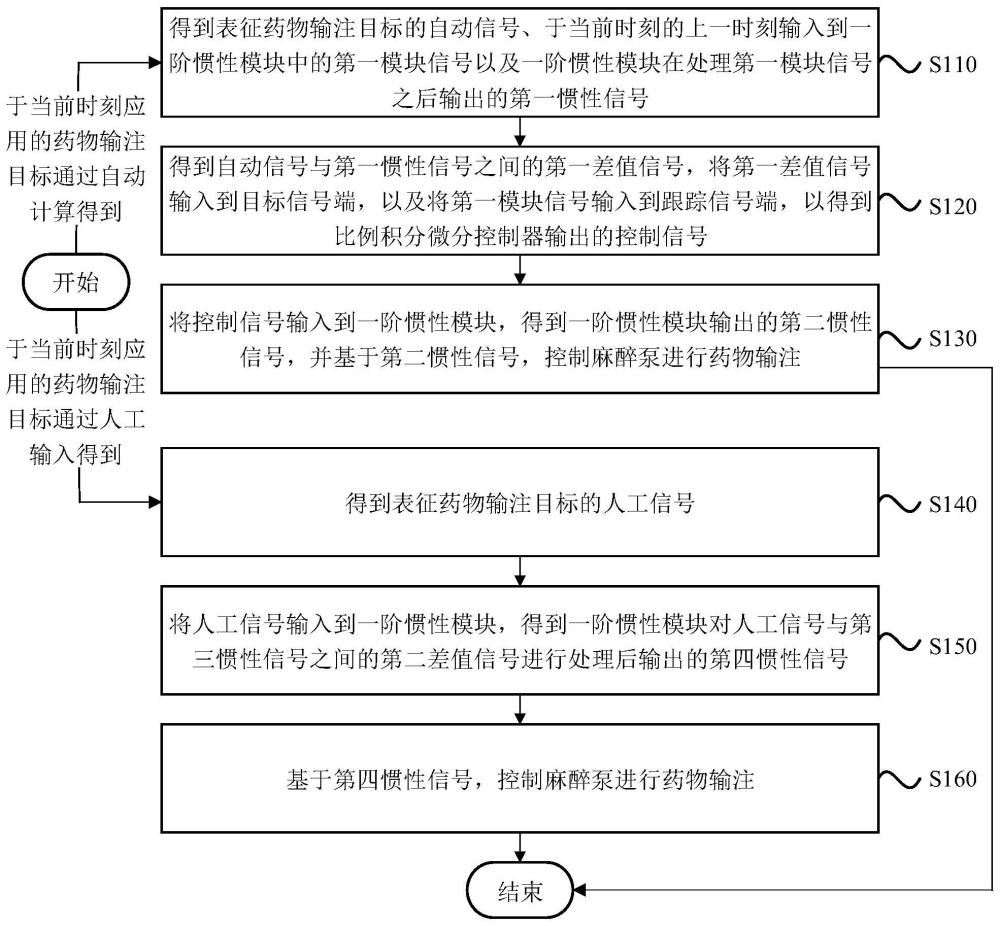
3、在于当前时刻应用的药物输注目标通过自动计算得到的情况下,执行下述步骤:
4、得到表征药物输注目标的自动信号、于当前时刻的上一时刻输入到一阶惯性模块中的第一模块信号以及一阶惯性模块在处理第一模块信号之后输出的第一惯性信号;
5、得到自动信号与第一惯性信号之间的第一差值信号,并将第一差值信号输入到目标信号端,以及将第一模块信号输入到跟踪信号端,得到比例积分微分控制器输出的控制信号;
6、将控制信号输入到一阶惯性模块,得到一阶惯性模块输出的第二惯性信号,并基于第二惯性信号,控制麻醉泵进行药物输注;
7、在药物输注目标通过人工输入得到的情况下,执行下述步骤:
8、得到表征药物输注目标的人工信号;
9、将人工信号输入到一阶惯性模块,得到一阶惯性模块对人工信号与第三惯性信号之间的第二差值信号进行处理后输出的第四惯性信号,其中,第三惯性信号由一阶惯性模块在上一时刻处理得到;
10、基于第四惯性信号,控制麻醉泵进行药物输注。
11、根据本发明的另一方面,提供了一种麻醉泵控制装置,该装置配置于麻醉泵控制系统,该麻醉泵控制系统至少包括比例积分微分控制器和一阶惯性模块,该比例积分微分控制器的输入端包括目标信号端和跟踪信号端:
12、在于当前时刻应用的药物输注目标通过自动计算得到的情况下,该装置可包括第一惯性信号得到模块、控制信号得到模块和第一麻醉泵控制模块:其中,
13、第一惯性信号得到模块,用于得到表征药物输注目标的自动信号、于当前时刻的上一时刻输入到一阶惯性模块中的第一模块信号及一阶惯性模块在处理第一模块信号之后输出的第一惯性信号;
14、控制信号得到模块,用于得到自动信号与第一惯性信号间的第一差值信号,并将第一差值信号输入到目标信号端,及将第一模块信号输入到跟踪信号端,得到比例积分微分控制器输出的控制信号;
15、第一麻醉泵控制模块,用于将控制信号输入到一阶惯性模块,得到一阶惯性模块输出的第二惯性信号,并基于第二惯性信号,控制麻醉泵进行药物输注;
16、在药物输注目标通过人工输入得到的情况下,该装置包括:人工信号得到模块、第四惯性信号得到模块以及第二麻醉泵控制模块;其中,
17、人工信号得到模块,用于得到表征药物输注目标的人工信号;
18、第四惯性信号得到模块,用于将人工信号输入一阶惯性模块,得到一阶惯性模块对人工信号与第三惯性信号之间的第二差值信号进行处理后输出的第四惯性信号,其中,第三惯性信号由一阶惯性模块在上一时刻处理得到;
19、第二麻醉泵控制模块,用于基于第四惯性信号,控制麻醉泵进行药物输注。
20、根据本发明的另一方面,提供了一种麻醉泵控制系统,可以包括:
21、至少一个处理器;以及
22、与至少一个处理器通信连接的存储器;其中,
23、存储器存储有可被至少一个处理器执行的计算机程序,计算机程序被至少一个处理器执行,以使至少一个处理器执行时实现本发明任意实施例所提供的麻醉泵控制方法。
24、根据本发明的另一方面,提供了一种计算机可读存储介质,其上存储有计算机指令,该计算机指令用于使处理器执行时实现本发明任意实施例所提供的麻醉泵控制方法。
25、本发明实施例的技术方案,通过利用启用跟踪模式的pid控制器以及自身带有反馈机制的first order process,在信号切换过程中,比较切换后的信号与可反映切换前的信号的输出信号之间的差值信号,并基于该差值信号得到用于控制麻醉泵的惯性信号,以基于该惯性信号进行麻醉泵控制,由此实现了不同信号之间的平稳切换,从而保证了麻醉泵的稳定控制。
26、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或是重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:1.一种麻醉泵控制方法,其特征在于,应用于麻醉泵控制系统,所述麻醉泵控制系统至少包括比例积分微分控制器和一阶惯性模块,所述比例积分微分控制器的输入端包括目标信号端和跟踪信号端,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,还包括:
3.根据权利要求1所述的方法,其特征在于,所述麻醉泵控制系统与云端数据库通讯连接,所述云端数据库包括第一数据库和第二数据库,在所述第一数据库内至少存储有于各时刻分别应用的药物输注目标,在所述第二数据库内至少存储有所述一阶惯性模块在各历史时刻分别输出的惯性信号;
4.根据权利要求3所述的方法,其特征在于,所述第一数据库内还存储有所述各药物输注目标分别写入到所述第一数据库的时间戳,和/或,先后写入到所述第一数据库的所述各药物输注目标分别对应并且依次递增的标识;
5.根据权利要求1所述的方法,其特征在于,所述基于所述第二惯性信号,控制麻醉泵进行药物输注,包括:
6.根据权利要求5所述的方法,其特征在于,所述麻醉泵控制系统中应用的网络传输层协议为传输层安全性协议,所述方法还包括:
7.根据权利要求1所述的方法,其特征在于,所述比例积分微分控制器中的比例系数、积分时间和微分时间通过如下步骤得到:
8.根据权利要求1-7中任一所述的方法,其特征在于,所述一阶惯性模块的极点是实部小于0并且虚部为0的复数;和/或,
9.一种麻醉泵控制装置,其特征在于,配置于麻醉泵控制系统,所述麻醉泵控制系统至少包括比例积分微分控制器和一阶惯性模块,所述比例积分微分控制器的输入端包括目标信号端和跟踪信号端:
10.一种麻醉泵控制系统,其特征在于,包括:
11.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现如权利要求1-8中任一所述的麻醉泵控制方法。
技术总结本发明实施例公开了一种麻醉泵控制方法、装置、系统及存储介质。该方法应用于麻醉泵控制系统,该麻醉泵控制系统至少包括比例积分微分控制器和一阶惯性模块,该方法可包括:利用启用跟踪模式的比例积分微分控制器以及自身带有反馈机制的一阶惯性模块,在信号切换过程中,比较切换后的信号与可反映切换前的信号的输出信号之间的差值信号,并基于该差值信号得到用于控制麻醉泵的惯性信号,以基于该惯性信号进行麻醉泵控制。本发明实施例的技术方案,可以实现不同信号之间的平稳切换,从而保证麻醉泵的稳定控制。技术研发人员:杨振宇,韩轩,张铁林,于布为,徐斌受保护的技术使用者:上海瑞懿为医疗科技有限公司技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240730/200178.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。