一种主动脚踝式四足机器人控制方法与流程
- 国知局
- 2024-08-01 00:14:27
本发明涉及机器人控制,尤其涉及一种主动脚踝式四足机器人控制方法。
背景技术:
1、四足机器人结合了机械、电子、计算机、传感器和控制理论等多个学科的知识,成为各国重点研究的方向。四足机器人通常具备较高的运动能力,配备了各种传感器和计算机视觉系统,并且能自主规划运动路径,被广泛应用于仓储物流、工程建设、家庭看护等领域。
2、目前四足机器人主要依靠点状足实现在复杂路面上的动态平衡控制,当机器人在松软的地面上运动时,所述点状足会发生沉陷或打滑,若不采取措施机器人将有倾覆的危险。现有的四足机器人采用快速调整腿的摆动和支撑来控制沉陷或打滑,但这种控制方法打破了机器人原有的控制节奏,从而导致机器人产生较大的能耗,并且机器人机身的稳定性不高。因此,提供四足机器人在松软或打滑路面上稳定控制的方法是亟需解决的问题。
技术实现思路
1、鉴于上述的分析,本发明旨在提供一种主动脚踝式四足机器人控制方法,用以解决现有四足机器人在松软或打滑路面上稳定性差的问题。
2、本发明提供了一种主动脚踝式四足机器人控制方法,所述方法包括以下步骤:
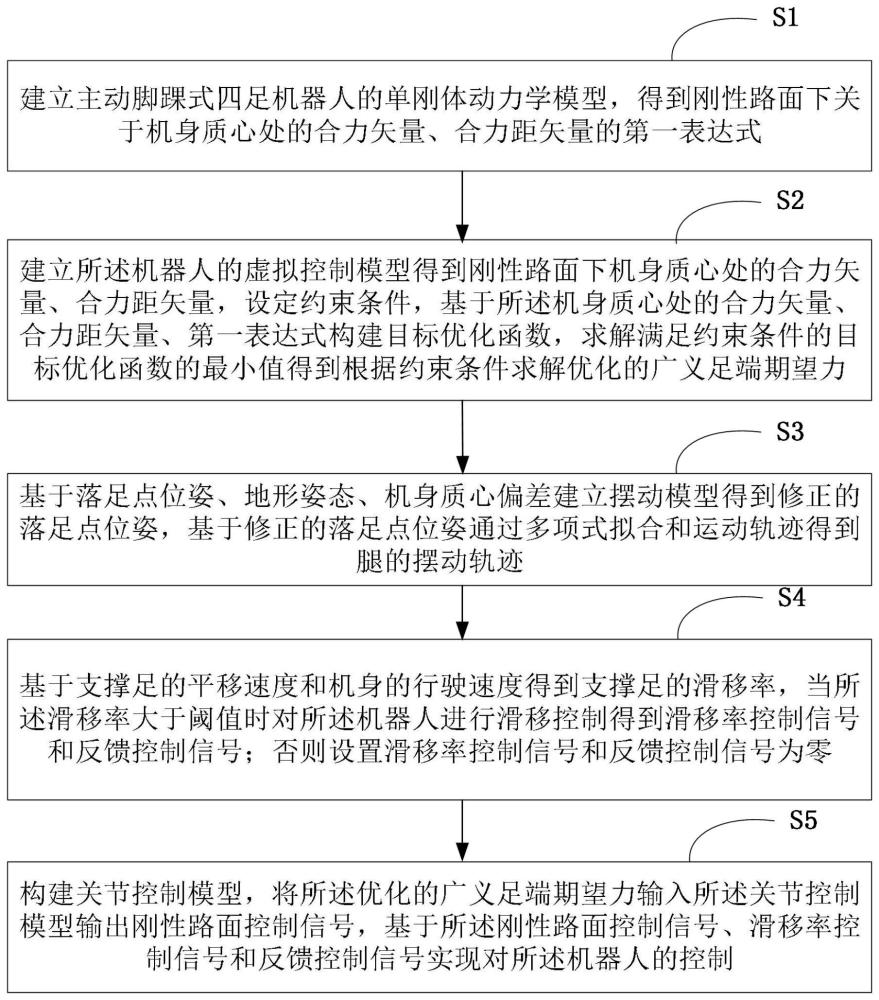
3、建立主动脚踝式四足机器人的单刚体动力学模型,得到刚性路面下关于机身质心处的合力矢量、合力距矢量的第一表达式;
4、建立所述机器人的虚拟控制模型得到刚性路面下机身质心处的合力矢量、合力距矢量,设定约束条件,基于所述合力矢量、合力距矢量、第一表达式构建目标优化函数,求解满足约束条件的目标优化函数的最小值得到优化的广义足端期望力;
5、基于落足点位姿、地形姿态、机身质心偏差建立摆动模型得到修正的落足点位姿,基于修正的落足点位姿通过多项式拟合得到腿的摆动轨迹;
6、基于支撑足的平移速度和机身的行驶速度得到支撑足的滑移率,当所述滑移率大于阈值时对所述机器人进行滑移控制得到滑移率控制信号和反馈控制信号;否则设置滑移控制信号和反馈信号为零;
7、构建关节控制模型,将所述优化的广义足端期望力输入所述关节控制模型输出刚性路面控制信号,基于所述刚性路面控制信号、滑移率控制信号和反馈控制信号实现对所述机器人的控制。
8、进一步地,所述建立主动脚踝式四足机器人的单刚体动力学模型,得到刚性路面下关于机身质心处的合力矢量、合力距矢量的第一表达式包括:
9、将所述四足机器人简化为单刚体,所述单刚体包含所述四足机器人的机体和支撑足,所述机体与支撑足之间虚拟连接,忽略其腿部的质量;
10、基于所述机器人的单刚体、旋转角速度、落足点、转动惯量、支撑足在刚性路面下的足地作用力及其力矩建立所述单刚体动力学模型得到刚性路面下关于机身质心处的合力矢量、合力距矢量的第一表达式。
11、进一步地,所述当所述滑移率大于阈值时对所述机器人进行滑移控制得到滑移率控制信号和反馈控制信号包括:
12、通过软土力学分析得到支撑足在软性路面下的足地作用力,通过弹性元件将所述在软性路面下的足地作用力转换为足端位置,通过逆运动学模块将足端位置转化为关节角度,执行器位置控制模块将关节的角度转换为反馈控制信号输出;
13、通过对地形进行预测得到所述机器人的期望滑移率,使所述滑移率与期望滑移率之差趋于零输出滑移率控制信号。
14、进一步地,所述基于修正的落足点位姿通过多项式拟合得到腿的摆动轨迹包括:
15、建立多项式,基于摆动轨迹中间点的位姿、对应的时刻以及初始足端与落足的位姿、速度、角速度得到所述多项式的系数;
16、通过所述多项式求解步态周期内t时刻对应的摆动轨迹的点;
17、通过平滑算法得到步态周期内腿的摆动轨迹。
18、进一步地,所述第一表达式通过下述方式得到:
19、
20、其中,p为机器人的质心位置,ω为机器人的旋转角速度,fi为第i条腿在刚性路面下的足地作用力,τi为第i条腿在刚性路面下的足地作用力矩,m为机器人的机身质量,ri为第i条支撑腿接触点的位置,i为机器人机身的转动惯量,g为重力加速度,n为支撑腿的数量,τm为机身质心处的合力矩矢量、fm为机身质心处的合力矢量。
21、进一步地,所述机器人的虚拟控制模型的表达式通过如下方式得到:
22、
23、其中,kp为正定增益矩阵;q为机身实际的位姿矢量;qd为机身期望的位姿矢量;kv为正定阻尼系数矩阵;为机身实际的位姿速度矢量;ka为正定加速度前馈系数矩阵;为机身期望的位姿加速度矢量;g为机体的重力矢量。
24、进一步地,所述目标优化函数由下述公式得到:
25、
26、
27、其中,q为加权矩阵,α为整定系数矩阵,δ*为优化的广义足端期望力,为第i个接触点的法向力,分别为足端法向力的最小值与最大值,τmin、τmax分别为足端力矩的最小值与最大值,为第i个接触点的切向力,μ为滑动摩擦系数,13为3*3的单位矩阵。
28、进一步地,所述摆动模型的表达式通过如下方式得到:
29、
30、其中,xf为修正的落足点位姿,pend为修正的落足位置,ψend为修正的落足姿态,ψg为地形的姿态,为机器人x方向的质心速度,为机器人y方向的质心速度,为机器人x方向的质心期望速度,为机器人y方向的质心期望速度,k1,x、k1,y、k2,x、k2,y为整定系数矩阵,px,offset为机器人质心x方向的偏差,py,offset为机器人质心y方向的偏差。
31、进一步地,通过下述公式计算得到支撑足的滑移率:
32、
33、其中,v0为单条腿的平移速度,vk为机身的行驶速度,s为该条腿对应的支撑足的滑移率。
34、进一步地,所述关节控制模型的表达式通过如下方式得到:
35、
36、其中,kpθ、kvθ为控制器关节位置刚度、阻尼系数矩阵;kτθ、kf为控制器关节扭矩比例、前馈系数矩阵;θd为期望的关节角度向量,由期望的足端位置和姿态通过逆运动学确定;θ为实际的关节角度向量;为期望的关节角速度向量;为实际的关节角速度向量;τ为实际的关节扭矩;u为关节控制器输入,τff为关节力前馈项。
37、与现有技术相比,本发明至少可实现如下有益效果之一:
38、1、本发明通过增加四足机器人的主动脚踝关节,并将足端期望力输入关节控制模型实现对机器人的有效控制,提升了四足机器人在松软或打滑路面上的动态稳定性。
39、2、本发明通过对关节控制形成滑移率反馈以实现对所述机器人的滑移控制,保持了机器人原有的控制节奏,不会产生较大的能耗,提升了四足机器人在松软或打滑路面上的通过效率。
40、3、本发明通过融合落足点位姿和地形姿态建立摆动模型修正落足点,进而得到腿的摆动轨迹,使机器人落足和腿的摆动符合地形特点,从而提升了四足机器人在低附着路面上的动态稳定性及通过效率。
41、4、本发明建立的摆动模型适用于走、跑、跳等多种步态,使机器人在不同运行状态下都能够进行地形适应,从而提高了四足机器人在复杂路面上的动态稳定性。
42、本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200175.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表