一种基于MPPT的新型快速稳定的追踪方法与流程
- 国知局
- 2024-08-01 00:14:42
本发明涉及光伏阵列最大功率点跟踪控制,具体涉及一种基于mppt的新型快速稳定的追踪方法。
背景技术:
1、目前,新能源领域中光伏发电可谓是有长足的进展,利用光伏逆变器可以将光伏(pv)太阳能板产生的可变直流电压转换为市电频率交流电(ac)的逆变器,可以反馈回商用输电系统,或是供离网的电网使用。
2、如果需要达到光伏板最大利用效率,则需要引进mppt(最大功率点追踪)技术,其主要功能是检测主回路直流电压及输出电流,计算出太阳能阵列的输出功率,并实现对最大功率点的追踪。同时,光伏电池的输出电流电压亦将随之变化,通过测量扰动前后光伏板输出功率和电压的变化,以决定下一周期的扰动方向,当扰动方向正确时太阳能光能板输出功率增加,下周期继续朝同一方向扰动,反之,朝反方向扰动,如此,反复进行着扰动与观察来使太阳能光电板输出达最大功率点。由此,对于mppt追踪的精度以及追踪速度决定了光伏逆变器的效率。目前,市面上基于mppt的能量调度方法,大多采用扰动观察法,通过mppt计算扰动pv给定电压,给到光伏逆变器,使光伏板能量得以最大程度的输出给光伏逆变器。
3、解决在最大功率点跟踪过程中,若选用较大的步长,震荡问题则非常明显;随着步长的减小,震荡的幅度会随之减小,可跟踪的速率也会随之降低,所以在定步长的跟踪时,最大功率点跟踪的速度和精度之间便产生了矛盾性。
技术实现思路
1、有鉴于此,有必要提供一种基于变步长的、同时兼顾最大功率点跟踪速度和精度的基于mppt的新型快速稳定的追踪方法。
2、一种基于mppt的新型快速稳定的追踪方法,用于调整步长,实现最大功率点的追踪,所述方法包括以下步骤:
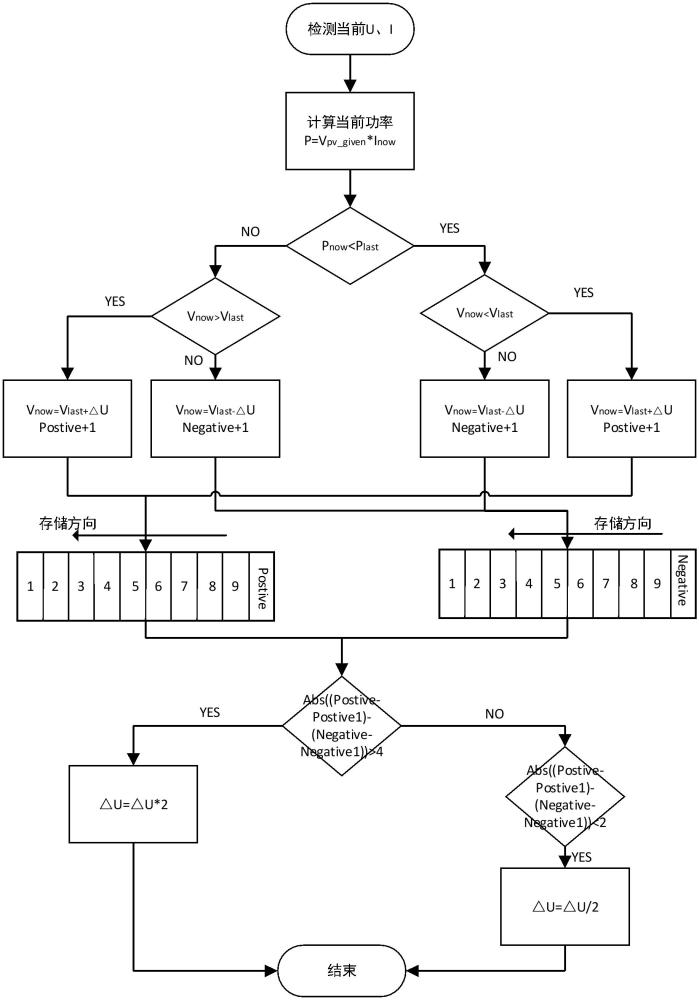
3、步骤一,检测光伏板主回路的直流电压和输出电流,计算光伏阵列的输出功率p=vpv_given*inow;
4、步骤二,减小参考电压,vpv_given=vlast_given-δu,若此时功率减小,pnow<plast,则转向步骤四;若功率增大,pnow>plast,则转向步骤五;
5、步骤三,增大参考电压,vpv_given=vlast_given+δu,若此时功率减小,pnow<plast,则转向步骤五;若功率增大,pnow>plast,则转向步骤四;
6、步骤四,增大参考电压,电压增量为δu,正向移动数组postive[n]中的数组指针加1,转向步骤六;
7、步骤五,减小参考电压,电压增量为-δu,反向移动数组negative[n]中的数组指针加1,转向步骤六;
8、步骤六,正向移动数组postive[n]中的数组指针与反向移动数组negative[n]中的数组指针的差值的绝对值是否大于第一预定值,若是,则增大扰动步长,参考电压δu=δu*2;若否,则转向步骤七;
9、步骤七,正向移动数组postive[n]中的数组指针与反向移动数组negative[n]中的数组指针的差值的绝对值是否小于第二预定值,若是,则减小扰动步长,参考电压δu=δu/2;
10、其中,n为正向移动数组postive[n]和反向移动数组negative[n]中包含的元素的个数。
11、优选地,步骤六和步骤七中的第一预定值和第二预定值的取值根据对最大功率点追踪的响应速度和追踪精度的具体要求决定,且第一预定值大于第二预定值。
12、优选地,步骤四中的正向移动数组postive[n]中保存有正向扰动的次数。
13、优选地,步骤五中的反向移动数组negative[n]中保存有反向扰动的次数。
14、优选地,步骤六和步骤七中的正向移动数组postive[n]中的数组指针与反向移动数组negative[n]中的数组指针的差值的绝对值的表达式如(1)式所示:
15、abs((postive-postive1)-(negative-negative1))(1);
16、其中,postive-postive1为前n次扰动中正向扰动的次数;negative-negative1为前n次扰动中反向扰动的次数。
17、上述基于mppt的新型快速稳定的追踪方法中,根据功率和参考电压的变化方向,确定新的参考电压的变化方向,即,功率和参考电压的变化方向相同,增大参考电压,电压增量为δu;功率和参考电压的变化方向相反,减小参考电压,电压增量为-δu。同时,依据参考电压的增加或者减小,调整正向移动数组postive[n]或者反向移动数组negative[n]中的数组指针,确定正向扰动和反向扰动的次数,最后,根据正向扰动和反向扰动的次数的差值决定δu的步长,从而实现了变步长扰动,使步长根据追踪情况进行自动调节。采取变步长的改良最大功率点跟踪,既保证了跟踪的速率,也减小了震荡幅度,保证了跟踪的精度,减少了能量的流失。本发明的方法简单,易于实现,成本低廉,便于推广。
技术特征:1.一种基于mppt的新型快速稳定的追踪方法,用于调整步长,实现最大功率点的追踪,其特征在于,所述方法包括以下步骤:
2.如权利要求1所述的基于mppt的新型快速稳定的追踪方法,其特征在于,步骤六和步骤七中的第一预定值和第二预定值的取值根据对最大功率点追踪的响应速度和追踪精度的具体要求决定,且第一预定值大于第二预定值。
3.如权利要求1所述的基于mppt的新型快速稳定的追踪方法,其特征在于,步骤四中的正向移动数组postive[n]中保存有正向扰动的次数。
4.如权利要求1所述的基于mppt的新型快速稳定的追踪方法,其特征在于,步骤五中的反向移动数组negative[n]中保存有反向扰动的次数。
5.如权利要求1所述的基于mppt的新型快速稳定的追踪方法,其特征在于,步骤六和步骤七中的正向移动数组postive[n]中的数组指针与反向移动数组negative[n]中的数组指针的差值的绝对值的表达式如(1)式所示:
技术总结本发明公开了一种基于MPPT的新型快速稳定的追踪方法,用于调整步长,实现最大功率点的追踪,根据功率和参考电压的变化方向,确定新的参考电压的变化方向,即,功率和参考电压的变化方向相同,增大参考电压,电压增量为ΔU;功率和参考电压的变化方向相反,减小参考电压,电压增量为‑ΔU。同时,依据参考电压的增加或者减小,调整正向移动数组Postive[n]或者反向移动数组Negative[n]中的数组指针,确定正向扰动和反向扰动的次数,最后,根据正向扰动和反向扰动的次数的差值决定ΔU的步长,从而实现了变步长扰动,使步长根据追踪情况进行自动调节。采取变步长的改良最大功率点跟踪,既保证了跟踪的速率,也减小了震荡幅度,保证了跟踪的精度,减少了能量的流失。技术研发人员:欧阳宇博,徐世亮受保护的技术使用者:深圳市高斯宝电气技术有限公司技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240730/200207.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。