多机协同巡检路径规划方法、终端及可读存储介质与流程
- 国知局
- 2024-08-01 00:14:42
本发明涉及无人机控制,特别涉及一种多机协同巡检路径规划方法、终端及可读存储介质。
背景技术:
1、随着近代科技迅速发展,电力系统巡检也从传统的人工巡检转变为无人机巡检并被广泛应用。
2、对于目前复杂地形环境下电力巡检中存在的高压电塔地理位置偏僻从而导致传统人工巡检效率低下等问题,本发明提出了一种多机协同巡检路径规划方法、终端及可读存储介质。
技术实现思路
1、本发明解决的技术问题在于,提供了一种多机协同巡检路径规划方法、终端及可读存储介质,在复杂地形巡检路径规划上拥有更好的全局搜索能力和收敛性,能够生成更优的无人机集群路径规划方案,保证了无人机和巡检数据的安全性。
2、本发明解决其技术问题是采用以下的技术方案来实现的:
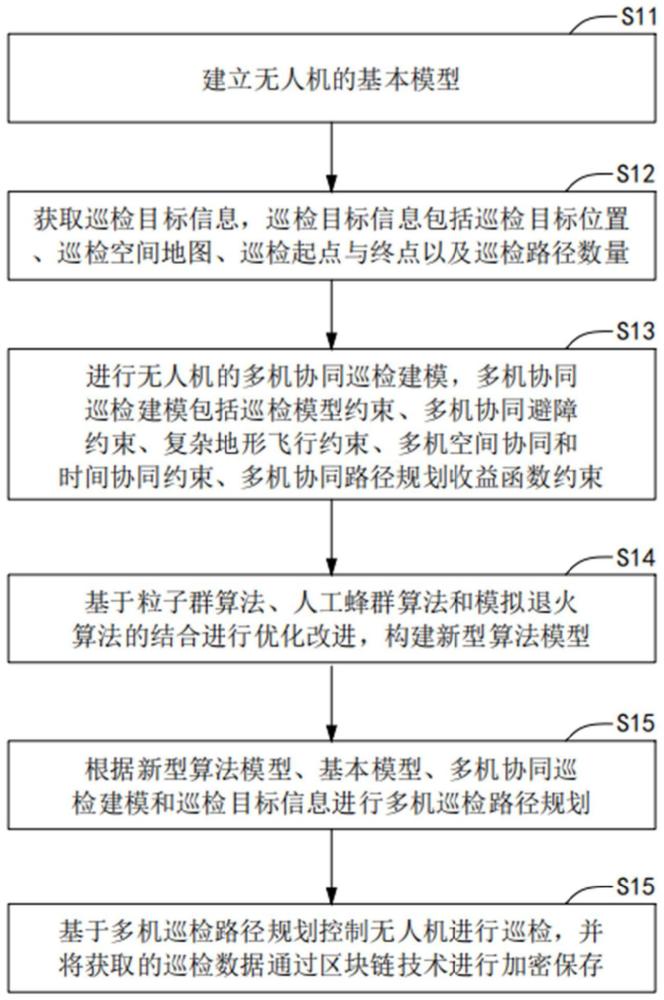
3、一种多机协同巡检路径规划方法,其特征在于,包括:建立无人机的基本模型;获取巡检目标信息,所述巡检目标信息包括巡检目标位置、巡检空间地图、巡检起点与终点以及巡检路径数量;进行无人机的多机协同巡检建模,所述多机协同巡检建模包括巡检模型、多机协同避障、飞行约束、多机空间协同和时间协同、多机协同路径规划收益函数;基于粒子群算法、人工蜂群算法和模拟退火算法的结合进行优化改进,构建新型算法模型;根据所述新型算法模型、基本模型、多机协同巡检模型和巡检目标信息进行多机巡检路径规划;基于所述多机巡检路径规划控制所述无人机进行巡检,并将获取的巡检数据通过区块链技术进行加密保存。
4、在本发明的较佳实施例中,上述基于粒子群算法、人工蜂群算法和模拟退火算法的结合进行优化改进,构建新型算法模型的步骤包括:将所述粒子群算法与所述人工蜂群算法相结合,通过所述人工蜂群算法的更新方式来更新粒子群的迭代,并基于粒子适应度将其划分为所述人工蜂群算法中的引领蜂、侦查蜂和跟随蜂;根据所述粒子的适应度的实时变化对巡检路径内的粒子角色进行调整;加入所述模拟退火算法,并根据所述模拟退火算法中的metropolis准则对算法进行对局部搜索能力进行更新。
5、在本发明的较佳实施例中,上述构建巡检模型:设置无人机从巡检起点至巡检终点的巡检距离和巡检总时长,所述巡检总时长小于无人机续航时长;获取巡检目标未被巡检到与上一次集群巡检后的时间间隔,并根据所述时间间隔确认所述巡检目标的权重和优先级,将所述巡检目标的权重之和最大化作为目标函数:根据所述巡检目标位置获取巡检起点、巡检目标和巡检终点之间的欧式距离:根据所述欧式距离和无人机的飞行速度获取巡检起点、巡检目标和巡检终点之间的飞行时间:获取无人机集群路线所用时间:且
6、在本发明的较佳实施例中,上述构建多机协同避障的目标函数:其中,dic为无人机之间的距离,dio1为无人机与树木之间的距离,dio2为无人机与磁场之间的距离,ω1、ω2、ω3为权重系数。
7、在本发明的较佳实施例中,上述构建飞行约束:设置无人机的最大飞行高度和最小飞行高度与转半径约束,hmin<hi<hmax,ri≥rmin,其中,最大飞行高度为hmax,最小飞行高度为hmin,最小转弯半径为rmin;设置无人机的两个航迹点间的俯仰角约束:其中设置无人机的两个航迹点之间的转向角约束:其中zi=zi+1。
8、在本发明的较佳实施例中,上述构建多机空间协同与时间协同:设置无人机之间的最小安全距离;设置无人机的最大飞行速度和最小飞行速度。
9、在本发明的较佳实施例中,上述构建多机协同路径规划收益函数:f=ω1fvoyage+ω2fheight+ω3finspection;其中,ω1、ω2和ω3分别航程代价、飞行高度代价、巡检代价作为收益函数中的权重系数。
10、在本发明的较佳实施例中,上述基于所述多机巡检路径规划控制所述无人机进行巡检,并将获取的巡检数据通过区块链技术进行加密保存的步骤,包括:获取所述无人机在巡检过程中的巡检数据;基于所述区块链的安全模型、智能合约和共识机制将所述巡检数据上传到所述区块链中进行加密保存。
11、一种智能终端,所述智能终端包括:存储器、处理器,其中,所述存储器上存储有多机协同巡检路径规划程序,所述多机协同巡检路径规划程序被所述处理器执行时实现如上述中任一项所述的多机协同巡检路径规划方法的步骤。
12、一种可读存储介质,所述可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上述中任一项所述的多机协同巡检路径规划方法的步骤。
13、本发明采用上述技术方案达到的技术效果是:将粒子群算法(pso)、人工蜂群算法(abc)、模拟退火算法(sa)相结合,以构建新型算法模型对无人机集群的巡检路径规划进行优化,使得规划的无人机集群巡检路径,避免了多机相撞,提高了无人机巡检的安全性和效率。
14、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明。
技术特征:1.一种多机协同巡检路径规划方法,其特征在于,包括:
2.如权利要求1所述的多机协同巡检路径规划方法,其特征在于,基于粒子群算法、人工蜂群算法和模拟退火算法的结合进行优化改进,构建新型算法模型的步骤包括:
3.如权利要求1所述的多机协同巡检路径规划方法,其特征在于,构建所述巡检模型约束:
4.如权利要求3所述的多机协同巡检路径规划方法,其特征在于,构建所述多机协同避障的目标函数约束:
5.如权利要求4所述的多机协同巡检路径规划方法,其特征在于,构建所述复杂地形飞行约束:
6.如权利要求5所述的多机协同巡检路径规划方法,其特征在于,构建所述多机空间协同与时间协同约束:
7.如权利要求6所述的多机协同巡检路径规划方法,其特征在于,构建所述多机协同路径规划收益函数约束:
8.如权利要求1所述的多机协同巡检路径规划方法,其特征在于,基于所述多机巡检路径规划控制所述无人机进行巡检,并将获取的巡检数据通过区块链技术进行加密保存的步骤,包括:
9.一种智能终端,其特征在于,所述智能终端包括:存储器、处理器,其中,所述存储器上存储有多机协同巡检路径规划程序,所述多机协同巡检路径规划程序被所述处理器执行时实现如权利要求1至8中任一项所述的多机协同巡检路径规划方法的步骤。
10.一种可读存储介质,其特征在于,所述可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至8中任一项所述的多机协同巡检路径规划方法的步骤。
技术总结本发明提供了一种多机协同巡检路径规划方法、终端及可读存储介质,包括:建立无人机的基本模型;获取巡检目标信息;进行多机协同巡检建模,多机协同巡检建模包括巡检模型约束、多机协同避障约束、复杂地形飞行约束、多机空间协同和时间协同约束、多机协同路径规划收益函数约束;基于粒子群算法、人工蜂群算法和模拟退火算法进行优化改进,构建新型算法模型;根据新型算法模型、基本模型、多机协同巡检建模和巡检目标信息进行多机巡检路径规划;基于多机巡检路径规划控制无人机进行巡检,并将获取的巡检数据通过区块链技术进行加密保存。本发明通过新型算法对巡检路径规划进行优化,并将巡检数据保存在区块链中,提高了无人机和巡检数据的安全。技术研发人员:陈建军,白宏伟,彭磊,袁静,王肃朝,吴丫丫,王敏,李君博,祁琛峰,杨生其受保护的技术使用者:国网甘肃省电力公司陇南供电公司技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240730/200206.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表