一种线控激光目标指引装置的制作方法
- 国知局
- 2024-08-01 00:15:22
本发明涉及线控激光指示领域,特别是涉及一种线控激光目标指引装置。
背景技术:
1、激光指示模块是用于指定目标的激光源,通常激光指示模块为激光制导炸弹、导弹或精确火炮弹提供瞄准,这些信号从目标反射到天空中,被激光制导武器的导引头检测到并重定向到反射信号的中心,考虑到使用场景的复杂和危险,将激光指示模块安装在无人设备上就成了自然的选择,由无人设备(如无人机、无人车、机器狗等)控制该激光指示模块将激光标志发射到指定的目标;
2、但随着“反无”装置的普及,无人设备(如无人机、无人车、机器狗等)都面临着被干扰而导致无法工作的风险,无人设备通常借助无线电信号来实现其卫星定位系统和控制系统的通信,如果对应频段的无线电信号被干扰,无人设备就会启动内置的自保机制,或被迫降落/停止,或悬停空中,又或折回出发地点。为解决上述的问题,现提出一种线控激光目标指引装置。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述现有线控激光目标指引装置存在的问题,提出了本发明。
3、为解决上述技术问题,本发明提供如下技术方案:一种线控激光目标指引装置,包括:
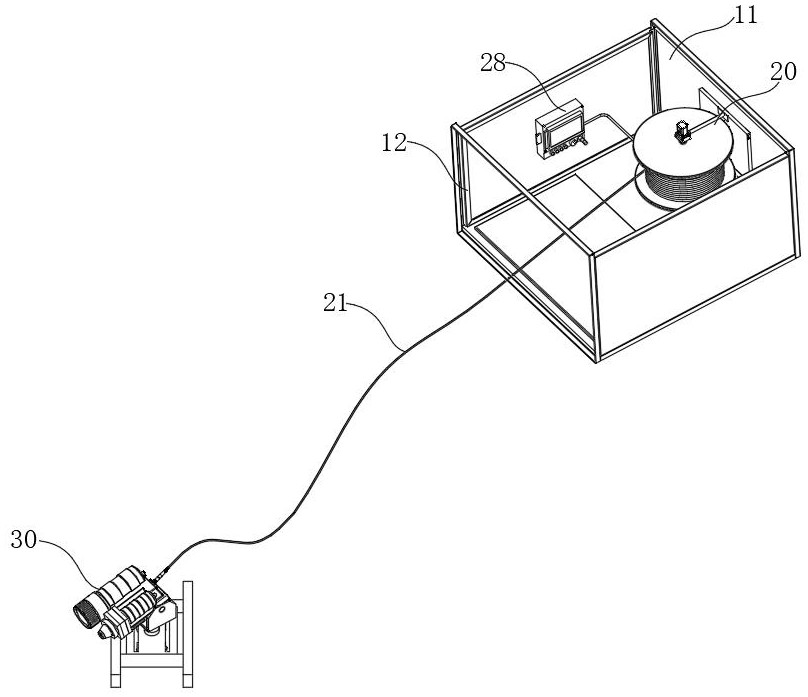
4、收放线机构,所述收放线机构包括控制线缆卷、控制线缆头和电流传感模块,所述控制线缆卷的输入端与控制线缆头的输出端电性连接;
5、所述电流传感模块与所述收放线机构中电传动轴架的电源线输出端电性连接,用于检测电传动轴架的实际工作电流;
6、线控目标指引机构,所述收放线机构通过控制线缆卷和控制线缆头电性连接于线控目标指引机构;
7、所述线控目标指引机构安装于无人设备上,所述线控目标指引机构包括通信模块、激光指示模块、光斑调制模块、速度传感模块;所述控制线缆头的输入端与激光指示模块电性连接;所述光斑调制模块安装于激光指示模块的激光发射头处,通信模块用于与无人设备的控制系统建立通信通道,传输控制指令和接收反馈信息;
8、所述控制线缆卷的输出端电性连接有pid控制器,所述线控目标指引机构还包括成像处理模块,成像处理模块用于捕捉目标区域的图像,并通过相连接的pid控制器将图像数据通过通信模块传输至外部遥控设备;
9、所述pid控制器还与速度传感模块以及电流传感模块连接,速度传感模块用于实时检测无人设备的行驶速度,并将检测到的速度数据传输至pid控制器,再根据速度传感模块获取的无人设备的实时行驶速度,计算所需的线缆盘的实时收放线速度;电流传感模块实时检测电传动轴架的工作电流,用于将电流值传输至pid控制器,将预设参考电流值与实时检测到的电流值进行比较,计算电流偏差值;以使pid控制器根据实时行驶速度和实时电流偏差值的正负性,调节线缆盘的收放速度以及无人设备行驶速度。
10、进一步的,所述成像处理模块安装于激光指示模块一侧,所述控制线缆卷的输出端电性连接有pid控制器,所述成像处理模块用于捕捉目标区域的图像,并通过pid控制器将图像数据通过通信模块传输至外部遥控设备;
11、所述速度传感模块实时检测无人设备的行驶速度,并将检测到的速度数据传输至pid控制器,再根据速度传感模块获取的无人设备的实时行驶速度,计算所需的线缆盘的实时收放线速度;
12、
13、其中,为控制线缆卷的实时收放线速度,为无人设备的实时行驶速度;
14、通过电流传感模块实时检测电传动轴架的工作电流,并将电流值传输至pid控制器,将预设参考电流值与实时检测到的电流值进行比较,计算电流偏差值;
15、
16、其中,为实时电流偏差值,为实时检测到的电流值,为预设参考电流值;
17、根据实时行驶速度和实时电流偏差值的正负性,判断控制线缆卷的收放速度与无人设备行驶速度之间的关系,电流偏差为正,则需要增加收放速度;电流偏差为负,则需要减小收放速度;
18、
19、
20、通过pid控制器对实时电流偏差值进行pid计算,得到pid控制量,pid控制公式如下:
21、
22、其中,为比例系数,为积分系数,为微分系数;
23、根据pid控制量实时调节电传动轴架中电机的电流值,确保电机按照计算的收放速度工作;
24、
25、其中,为调节后的传动电机电流值。
26、进一步的,所述无人设备包括但不限于无人地面车、无人机器狗和无人机;
27、所述控制线缆卷和控制线缆头为光纤或铜缆,并具备重复使用能力,能够跟随无人设备的移动而延伸,并在无人设备返回时收缩。
28、进一步的,所述收放线机构的外部设置有工装箱,所述收放线机构还包括侧支架、两个固定杆和线盘;
29、所述收放线机构通过侧支架螺栓安装于工装箱的内壁,两个所述固定杆的一端对称焊接于侧支架的两侧,所述电传动轴架的传动轴固定安装有线盘,两个所述固定杆的另一端固定安装于电传动轴架上。
30、进一步的,所述控制线缆卷绕设于线盘的外壁,所述工装箱正对线盘的一侧开设有开口槽,所述控制线缆头延伸至工装箱外部时穿过开口槽。
31、进一步的,所述线控目标指引机构还包括安装架、微电缸、铰座、步进电机和支座;
32、所述微电缸的缸筒底部螺栓安装于安装架的顶部,所述铰座的底部固定连接于微电缸的输出轴端,所述支座的外壁通过销轴铰接于铰座的内壁,且销轴的一端向铰座的外部延伸,所述步进电机的输出轴与销轴延伸端固定连接;
33、所述安装架的底部对称安装有两组电磁吸板;
34、所述控制线缆头的输入端与激光指示模块电性连接;所述光斑调制模块安装于激光指示模块的激光发射头处,通信模块安装于激光指示模块的后侧,激光指示模块安装于支座的一侧;所述速度传感模块安装于支座的底中部,用于实时检测无人设备的行驶速度。
35、进一步的,所述支座的底部安装有导航坐标模块,所述支座的顶部另一侧安装有探照模块。
36、进一步的,所述成像处理模块包括:
37、成像传感器,用于捕捉图像;
38、图像处理单元,与成像传感器连接,用于处理捕捉到的图像数据,并生成目标图像;
39、图像传输单元,与通信模块连接,用于将处理后的图像数据通过所述通信模块传输至外部遥控设备。
40、进一步的,所述光斑调制模块用于生成携带任务指令的信息光斑,信息光斑的图案包括接收方编号和任务内容,并调制激光束的光斑形状和内容。
41、进一步的,所述线控激光目标指引装置执行指引操作包括以下步骤:
42、遥控设备通过控制线缆头将控制信号传输至线控目标指引机构,通信模块接收到控制信号,并将其传递给无人设备的控制系统;
43、无人设备根据控制信号移动至目标附近,收放线机构启动控制线缆卷,开始放线,确保线缆随无人设备移动而延伸,速度传感模块实时检测无人设备的行驶速度,并将速度数据传输至pid控制器;
44、pid控制器根据速度传感模块获取的无人设备的实时行驶速度,计算所需的线缆盘的实时收放线速度;
45、当无人设备接近目标区域时,激光指示模块启动,发射激光束指向目标,光斑调制模块根据任务要求调制激光束的光斑形状和内容,确保精确指向目标;
46、成像处理模块启动,成像传感器捕捉目标区域的图像,图像处理单元处理捕捉到的图像数据,并生成目标图像,图像传输单元将处理后的图像数据通过控制线缆卷传输至pid控制器,再通过通信模块传输至遥控设备;
47、遥控设备接收成像处理模块传输的图像数据,操作人员通过遥控设备查看实时图像,判断激光光斑是否准确指向目标;
48、如果激光指示位置不准确,操作人员通过遥控设备发送调整指令;
49、pid控制器接收调整指令,并通过通信模块将指令传输至激光指示模块;
50、激光指示模块根据指令调整激光发射头的指向位置,确认激光光斑位置准确后,无人设备执行任务,完成目标指引操作。
51、本发明的有益效果:
52、本发明采用无人设备+激光指示模块结合的方式,将激光指示模块安装在无人设备上,有效减少人员在复杂和危险环境中的暴露风险,通过无人设备能够灵活移动,迅速到达指定位置,结合激光指示模块的精确指向能力,实现高效的目标指引和定位;
53、本发明采用线控方式,通过控制线缆进行数据和控制信号的传输,避免了无线电信号的干扰问题,即使在强无线电干扰环境下,无人设备仍然能够稳定工作,提升系统的可靠性和安全性;
54、本发明适用于不同类型的无人装置,地面行驶的无人设备(机器狗、无人车)适合在地形复杂或封闭空间内操作;空中飞行的无人机则适合在广阔区域和高空环境中操作,多样化的应用场景扩展了装置的使用范围;
55、本发明激光指示模块能够根据任务需求发射不同类型的光斑(可见或不可见),适应多种环境和任务要求,可见光斑适合一般环境下的目标指引,而不可见光斑适合隐蔽操作或夜间任务;
56、本发明光斑图案中嵌入接收方编号和任务内容信息,精确传达任务指令,提高任务执行的准确性和效率,通过该方式,指令传达更加明确,避免误操作和信息混淆,提升了系统的可靠性;
57、本发明的控制导线可选择光纤或铜缆,具备多样性和灵活性,光纤具有高速数据传输和抗电磁干扰能力,适合长距离和高精度控制;铜缆则具有成本低、连接方便的优点。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200278.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表