一种集成PLC数据采集与过程控制系统的制作方法
- 国知局
- 2024-08-01 00:15:35
本发明属于煤矿采掘,尤其涉及一种集成plc数据采集与过程控制系统。
背景技术:
1、在煤炭采掘行业,自动化生产程度越来越高。采挖机械需要通过编程实现对机械运行状态的监控和精确控制,确保机械的安全稳定运行。plc(可编程逻辑控制器)技术在在煤矿采掘机械中起到核心作用,实现对采煤过程的自动化控制。比如采煤机的切割速度、深度等参数的调节是通过plc实现的,提高了采煤效率。在煤炭输送过程中,plc控制系统能够实现对输送机的自动化控制,包括启动、停止、速度调节等功能。
2、在plc控制过程中,pid的参数整定非常重要。pid整定的步骤主要如下:确保前提条件满足:检查反馈信号是否稳定,执行机构是否正常,以及控制器的正反作用是否设置正确。初始化参数,开始逐步增大比例增益,观察其对控制过程的影响。比例系数kp对控制效果有直接影响,增大kp会增强比例作用,使系统动态响应加快,消除误差的能力增强,但可能导致超调量变大;减小kp则会减弱比例作用,使系统动态响应减慢,但稳定性可能会提高。当过程变量达到给定值且在给定值上下波动时,将调好的比例系数调整到50%~80%后,开始由大到小减小积分时间,直到过程值与设定值相等或无限接近。积分时间ti对控制效果也有影响,合理的积分时间可以消除稳态误差,但积分作用过强可能导致积分饱和,引起系统震荡。在比例和积分作用调节满意后,引入微分作用,以反映系统偏差信号的变化率,实现超前的控制效果。微分时间td的选择也会影响控制效果,需要根据实际情况进行反复调整。
3、由于pid整定是一个反复试凑的过程,可能需要根据实际情况进行多次调整才能达到满意的控制效果。同时,还需要考虑pid的采样时间是否适合当前系统,因为短于采样时间间隔的信号变化是不能测量到的。因此通常采用群智能算法如麻雀搜索算法进行整定。
4、现有的麻雀搜索算法尽管在解决优化问题时表现出较高的效率和精度,但仍存在一些问题和挑战。如收敛速度慢,易陷入局部最优,参数设置敏感,缺乏自适应性,缺乏根据问题特性和搜索进展自适应调整搜索策略的能力。这可能导致算法在某些情况下不够灵活和有效。
5、因此需要克服这些问题,对麻雀搜索算法进行改进和优化,提高算法的自适应性和鲁棒性,以适应不同的问题和场景。
技术实现思路
1、有鉴于此,本发明的目标是采用一种改进的麻雀搜索算法,对plc数据采集与过程控制系统的pid参数进行整定,提高算法的自适应性和鲁棒性。改进的麻雀搜索算法优化发现者的位置更新方式和跟随者的位置更新方式,以避免算法陷入局部最优。
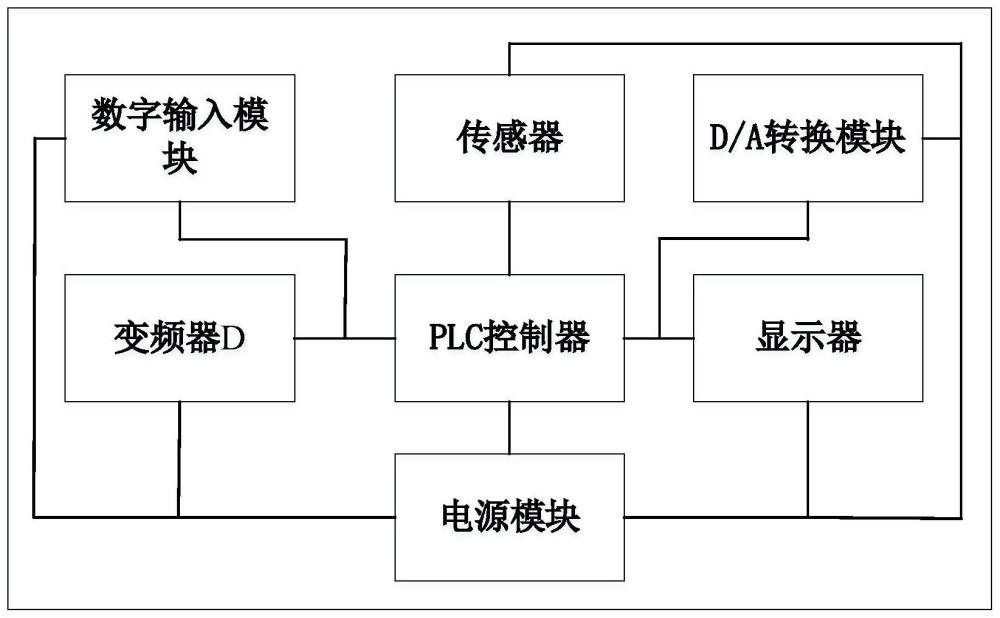
2、为实现上述目的,本申请公开的集成plc数据采集与过程控制系统,包括数字输入模块、显示器、d/a转换模块、电源模块、传感器和变频器、plc控制器,plc控制器用于从各传感器中采集plc模块实时数据,对传感器实时数据进行存储、分发、查询的服务支撑;数字输入模块、显示器、d/a转换模块、电源模块、传感器和变频器分别与plc控制器电连接,所述传感器包括温度传感器、电流传感器、压力传感器、瓦斯传感器、位移传感器和倾角传感器,其中,所述plc控制器的pid整定过程被配置为:
3、将pid控制器的比例、积分和微分系数作为优化变量,将系统的超调量和调节时间作为麻雀搜索算法的适应度函数;
4、设置麻雀搜索算法的初始参数,包括种群大小、迭代次数、搜索空间范围;
5、在每次迭代中,算法根据适应度函数评估当前参数组合的性能,并基于群体智能的搜索策略更新参数值;
6、随着迭代的进行,逐渐找到更优的pid参数组合;在每次更新参数后,重新评估系统的性能;
7、终止条件与结果输出:当达到最大迭代次数时,算法停止迭代,并输出最终的pid参数整定结果。
8、更进一步地,跟随者的位置更新公式为:
9、
10、其中,表示第t+1次迭代时麻雀在第d维的最优位置,表示第i只麻雀在第t次迭代时在第d维的位置,表示第t次迭代时全局最差位置,极角θ=360/i,a是搜索空间上界与下界之差与迭代次数t的商,a+=at(aat)-1,a表示一个1×d的矩阵,其中的元素随机赋值为1或者-1。
11、更进一步地,选择适应度提高幅度大于预设阈值的麻雀也作为发现者,与每次迭代中选择pd数量的适应度数值在前列的麻雀一起作为发现者。
12、更进一步地,发现者的位置更新公式如下:
13、
14、其中,t表示当前迭代次数,表示第t+1代中第i之麻雀在第d维的位置,是第t次迭代中第i只麻雀在第d维的位置,t表示最大迭代次数,st∈[0.5,1]为预设的种群安全值,α是介于(0,1]之间均匀分布的随机数,q是服从标准正态分布的随机数,l表示一个元素全为1的1×d的矩阵,r为预警值,wt为第t轮迭代的惯性权重。
15、更进一步地,wt计算如下:
16、
17、其中,nt是第t次迭代比第t-1次的适应度提高值大于预设阈值的麻雀数量,iiter是最大迭代次数,pd是适应度数值由大到小排列后前pd个麻雀的数量。
18、本申请的有益效果如下:
19、将麻雀搜索算法用于plc系统的pid整定过程中,将麻雀算法前后两轮迭代中适应度提高幅度大于预设阈值的麻雀也作为发现者,提高了发现者的数量,提高了寻优速度;本申请的跟随者位置更新计算公式中进行双曲螺线加权,使得一部分跟随者离发现者位置有足够大距离,避免陷入局部最优中,通过对麻雀搜索算法的改进,提高了pid整定的实时速度,更好地适应煤炭采掘机械的自动化控制。
技术特征:1.一种集成plc数据采集与过程控制系统,包括数字输入模块、显示器、d/a转换模块、电源模块、传感器和变频器,其特征在于,还包括:plc控制器,用于从各传感器中采集plc模块实时数据,对传感器实时数据进行存储、分发、查询的服务支撑;数字输入模块、显示器、d/a转换模块、电源模块、传感器和变频器分别与plc控制器电连接,所述传感器包括温度传感器、电流传感器、压力传感器、瓦斯传感器、位移传感器和倾角传感器,其中,所述plc控制器的pid整定过程被配置为:
2.根据权利要求1所述的集成plc数据采集与过程控制系统,其特征在于,跟随者的位置更新公式为:
3.根据权利要求1所述的集成plc数据采集与过程控制系统,其特征在于,将适应度提高幅度大于预设阈值的麻雀也作为发现者,与每次迭代中选择pd数量的适应度数值在前列的麻雀一起作为发现者。
4.根据权利要求1所述的集成plc数据采集与过程控制系统,其特征在于,发现者的位置更新公式如下:
5.根据权利要求4所述的集成plc数据采集与过程控制系统,其特征在于,wt计算如下:
技术总结本发明公开了一种集成PLC数据采集与过程控制系统,包括数字输入模块、显示器、D/A转换模块、电源模块、传感器、变频器、PLC控制器,PLC控制器用于从各传感器中采集PLC模块实时数据,对传感器实时数据进行存储、分发、查询的服务支撑;数字输入模块、显示器、D/A转换模块、电源模块、传感器和变频器分别与PLC控制器电连接,所述传感器包括温度传感器、电流传感器、压力传感器、瓦斯传感器、位移传感器和倾角传感器。本申请将麻雀搜索算法用于PLC系统的PID整定过程中,提高了寻优速度;本申请避免陷入局部最优中,提高了PID整定的实时速度,更好地适应煤炭采掘机械的自动化控制。技术研发人员:王靖,陈楠,曹建时,张腾,陈浩,周志杨,蒋正浩,张九琴,宁萌,吴美华受保护的技术使用者:南京业恒达智能系统有限公司技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240730/200295.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表