一种多智能体动态事件触发固定时间二分一致性控制方法
- 国知局
- 2024-08-01 00:15:31
本发明属于多智能体控制,具体是涉及一种多智能体动态事件触发固定时间二分一致性控制方法。
背景技术:
1、随着人工智能技术的快速发展,多智能体控制受到了广泛的关注。例如现有专利号为cn101853006a的《多智能体协同控制系统》就公开了多智能体协同控制系统的模块化结构和工作过程。目前多智能体在多无人机协同、智能交通系统、智能家居、多机器人协作工作等领域取得了广泛的应用。多智能体中的一致性是指系统中的智能体通过相互协作和通信,使得它们的状态或行为在一定意义上趋于一致。一致性是多智能体稳定性和协同性的关键特征,对于实现系统协同控制至关重要。
2、在过去的研究中,一致性问题主要集中在如何使得整个多智能体达到全局一致性。然后现实生活中,多智能体不仅存在合作关系,可能还会存在竞争关系。如工业机器人系统中,机器人可以分为不同的归属群,我们希望每个机器人群内部机器人达到一致即可,无需全部机器人达到一致性。二分一致性的研究在一定程度上解决了全局一致性难以实现的问题,使系统更加灵活适应不同的需求。
3、在多智能体的研究中,收敛速度是一个关键的性能指标,反映了系统从初始状态到达一致性状态所需的时间。传统的渐进时间控制是多智能体在时间到达无穷大时达到收敛,其收敛速度较慢。因此学者们提出了有限时间控制来提高系统的收敛速度,然而有限时间控制方法依赖于系统的初始状态,如果系统的初始状态较大,收敛时间将会过长。而固定时间控制能够提高系统的收敛速度同时收敛时间不受系统初始状态影响,确保系统在任意初始状态都在在固定时间内达到设定状态。在对实时性强、对时间要求严格的应用场景,如自动驾驶、机器人协同操作等,更为适用于固定时间控制。
4、由于系统网络通讯系统带宽和资源是有限的,因此设计优异的控制方案可以有效的解决传输资源受限、通讯受限、网络时延、量化等问题。与传统的时间触发控制相比,事件触发控制则需要很少的信息传输和控制任务的执行,当且仅当状态测量误差超过阈值时,事件才会触发,从而控制器更新数据。由于只有在必要时才执行控制动作,事件触发控制可以降低系统的能耗,提高能源利用效率。传统的事件触发由于触发阈值是固定,仍然存在事件触发次数过多的问题。需要引入更灵活的事件触发方案,进一步降低系统触发次数,节省通信资源。
技术实现思路
1、本发明要解决的技术问题是提供一种多智能体动态事件触发固定时间二分一致性控制方法,基于动态事件触发机制,通过引入动态阈值,进一步降低事件触发的次数,节省系统的通信资源,同时采用固定时间控制,提高了系统的收敛的速度,从而用以实现多智能体的二分一致性控制。
2、为了解决上述技术问题,本发明提供一种多智能体动态事件触发固定时间二分一致性控制方法,包括的过程如下:
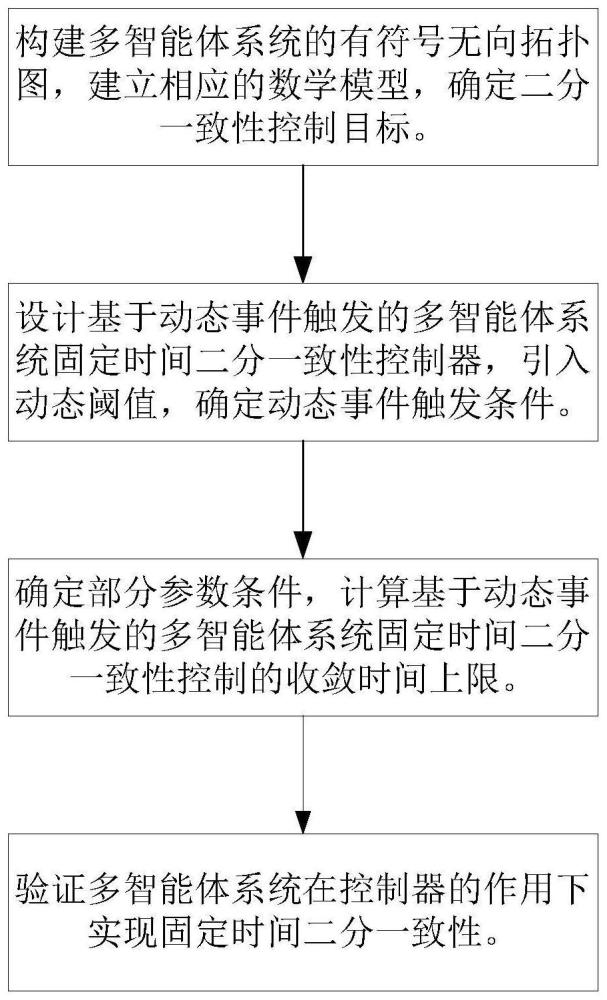
3、步骤s1、构建多智能体的有符号无向拓扑图和拉普拉斯矩阵,建立多智能体的数学模型,确定二分一致性控制目标;
4、步骤s2、建立多智能体动态事件触发固定时间的二分一致性控制器,采样各个智能体的事件触发速度并输入给二分一致性控制器获得各智能体的二分一致性控制器输出,进一步得到测量误差、事件触发函数和动态事件触发阈值从而确定动态触发条件;当满足动态触发条件时,更新多智能体中采样的事件触发速度,并作为二分一致性控制器的输入,使得二分一致性控制器的输出值更新,否则二分一致性控制器保持不变;
5、二分一致性控制器的输出值传输给各智能体的电机驱动器,驱动电机转动实现各智能体运动;迭代运行至多智能体状态实现二分一致性;
6、步骤s3、计算多智能体动态事件触发二分一致性控制器的固定收敛时间上限,使得多智能体在任意的初始状态下都能在固定时间内达到二分一致性。
7、作为本发明的一种多智能体动态事件触发固定时间二分一致性控制方法的改进:
8、所述有符号无向拓扑图和拉普拉斯矩阵的建立过程为:
9、分别采集各个智能体的位置xi(t)和速度vi(t),其中初始位置与初始速度信号分别记为xi(0)和vi(0),通过采样每个智能体中的信息,如果智能体i中含有智能体j的信息,代表智能体i和智能体j可以进行相互交换信息,此时aij≠0,否则aij=0,通过此方法得到邻接矩阵a=[aij]∈rn×n,因为是无向图,所以aij=aji;多智体的通信拓扑图为其中为非空节点集合,为边集合;
10、多智体的拉普拉斯矩阵l=[lij]n×n满足:
11、
12、判断通信拓扑图是否为结构平衡图:如果有符号g可以分为和两部分,满足并且对于所有的vi,存在aij≥0;如果m≠n,(m,n∈{1,2}),则aij≤0,那么图g是结构平衡图,否则图g是结构不平衡图。
13、作为本发明的一种多智能体动态事件触发固定时间二分一致性控制方法的进一步改进:
14、所述多智能体的数学模型为:
15、
16、其中,xi(t)为第i个智能体的实时位置信息,vi(t)为第i个智能体的速度信息vi(t),ui(t)∈rn为第i个智能体的二分一致性控制器的输出。
17、作为本发明的一种多智能体动态事件触发固定时间二分一致性控制方法的进一步改进:
18、所述二分一致性控制目标为:
19、(1)多智能体的速度满足:当i,r={1,2}时kij=1,当i∈vr,j∈v3-r时kij=-1;
20、(2)多智能体的位置满足:存在正数值c使得i,j∈vr,r={1,2};
21、并且存在一个常数值tmax,满足t≤tmax;
22、引理1:对于多智体,如果存在一个李雅普诺夫函数v满足:
23、
24、其中α1,α1,p∈(1,∞),q∈(0,1),那么系统满足固定时间稳定,稳定时间与初始状态无关;固定时间为:
25、
26、引理2:如果存在常数k1,k2…kn≥0,那么存在
27、
28、
29、作为本发明的一种多智能体动态事件触发固定时间二分一致性控制方法的进一步改进:所述二分一致性控制器为:
30、
31、其中,p∈(1,∞),q∈(0,1),c1,c2,c3∈(0,∞),是智能体i的最新事件触发时间。
32、作为本发明的一种多智能体动态事件触发固定时间二分一致性控制方法的进一步改进:
33、所述测量误差为:
34、
35、作为本发明的一种多智能体动态事件触发固定时间二分一致性控制方法的进一步改进:
36、所述事件触发函数为:
37、
38、其中θ∈(0,∞),ε∈(0,1)为触发函数的参数。
39、作为本发明的一种多智能体动态事件触发固定时间二分一致性控制方法的进一步改进:
40、所述动态事件触发阈值:
41、
42、其中ηi(0)∈(0,∞)为动态阈值的初始值,γ∈(0,1),c4,c5,c6∈(0,∞)为系统的设计参数。
43、作为本发明的一种多智能体动态事件触发固定时间二分一致性控制方法的进一步改进:
44、所述动态触发条件为:
45、
46、当式(11)条件满足时,所述二分一致性控制器更新,否则二分一致性控制器不更新。
47、作为本发明的一种多智能体动态事件触发固定时间二分一致性控制方法的进一步改进:
48、所述固定收敛时间的上限值为:
49、(1)所述式(7)中参数c2、式(9)中参数θ和ε,式(10)中的参数c6和γ需满足以下条件:
50、
51、(2)固定收敛时间的上限为:
52、
53、其中
54、本发明的有益效果主要体现在:
55、1、本发明设计的控制器能够实现任意初始状态在固定时间内达到收敛,并且系统收敛速度更快;
56、2、本发明设计的控制器采用动态事件触发,基于系统实时状态进行调整事件触发阈值,降低事件触发次数,提高系统的效率,降低能耗,延长控制器寿命。
57、3、本发明设计的控制器能够实现多智能体达到二分一致,不仅实用多智能体合作场合,还适用于多智能体竞争场合。因此本发明应用场景更为广泛。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200286.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表