一种基于仿生学的无人机集群避障飞行方法与流程
- 国知局
- 2024-08-01 00:16:39
本发明属于无人机集群飞行领域,尤其涉及一种基于仿生学的无人机集群避障飞行方法。
背景技术:
1、当无人机集群执行飞行任务时,需要充分考虑飞行安全的问题。目前无人机集群的避障飞行过程中,需要各无人机时刻获得所有其他无人机的位置,并通过传统的方法进行无人机避障飞行。在集群内部时刻进行两两位置通信,对集群内部通信带宽有较高的要求,尤其当集群规模较大时,对带宽的占用更是呈几何级增长;而且传统的避障飞行方法中,也会时刻考虑集群内部所有无人机的位置进行飞行策略计算,对计算资源的占用也较多。
2、自然界中,许多动物以群体方式生存生活,当狼群捕猎、鸟群飞行时,它们的集体运动与无人机集群执行任务时的飞行情况类似,狼群、鸟群的集体通信和运动方式给无人机集群飞行带来参考。动物群体在集体运动时也需要考虑集体内部避障的问题,它们并不需要时刻获得所有其它个体的位置,如大规模鸟群飞行时只需获得附近同类的位置并通过相应的策略完成集群内部的避障。
3、但是,现有技术中还没有借鉴仿生学原理的避障飞行方法。
技术实现思路
1、有鉴于此,本发明提供了一种基于仿生学的无人机集群避障飞行方法。本发明利用仿生学,实现了较少通信资源和计算资源占用下的无人机集群位置信息共享及避障飞行。
2、为实现上述目的,本发明采用的技术方案为:
3、一种基于仿生学的无人机集群避障飞行方法,包括以下步骤:
4、步骤1,根据无人机集群任务类型和避障飞行要求,设置无人机集群仿生模型;
5、步骤2,设置无人机集群通信网络构型并组网,各无人机之间具备位置信息相互通信能力;
6、步骤3,无人机获得自身位置信息,起飞并执行任务;
7、步骤4,无人机实时获得当前集群的网络通信状态;
8、步骤5,根据无人机集群的仿生模型约束和网络通信状态,向满足条件的其他无人机发送位置信息;
9、步骤6,根据任务目标位置、障碍物位置及当前接收到的其他无人机位置,通过仿生模型进行无人机避障策略计算,实现无人机集群避障飞行。
10、进一步地,步骤1的具体方式为:
11、步骤101,当无人机集群任务需要集群内所有无人机共享位置信息才能执行任务时,根据与集群规划中狼群算法的对应关系,设定无人机集群仿生模型为狼群;
12、步骤102,当无人机集群任务不需要集群内所有无人机共享位置信息就可以执行任务时,根据与集群规划中鸟群算法的对应关系,设定无人机集群仿生模型为鸟群;
13、步骤103,当无人机集群仿生模型为鸟群时,根据飞行任务和集群避障飞行要求,设定仿生模型中共享位置信息的初始通信跳数。
14、进一步地,步骤2的具体方式为:
15、步骤201,无人机集群通过蓝牙、wifi、自组网或数据链的通信手段实现网络连接;
16、步骤202,设置无人机集群构成集中式或分布式的网络架构;
17、步骤203,无人机集群通过udp或tcp的手段实现两两之间位置信息相互通信。
18、进一步地,步骤4的具体方式为:
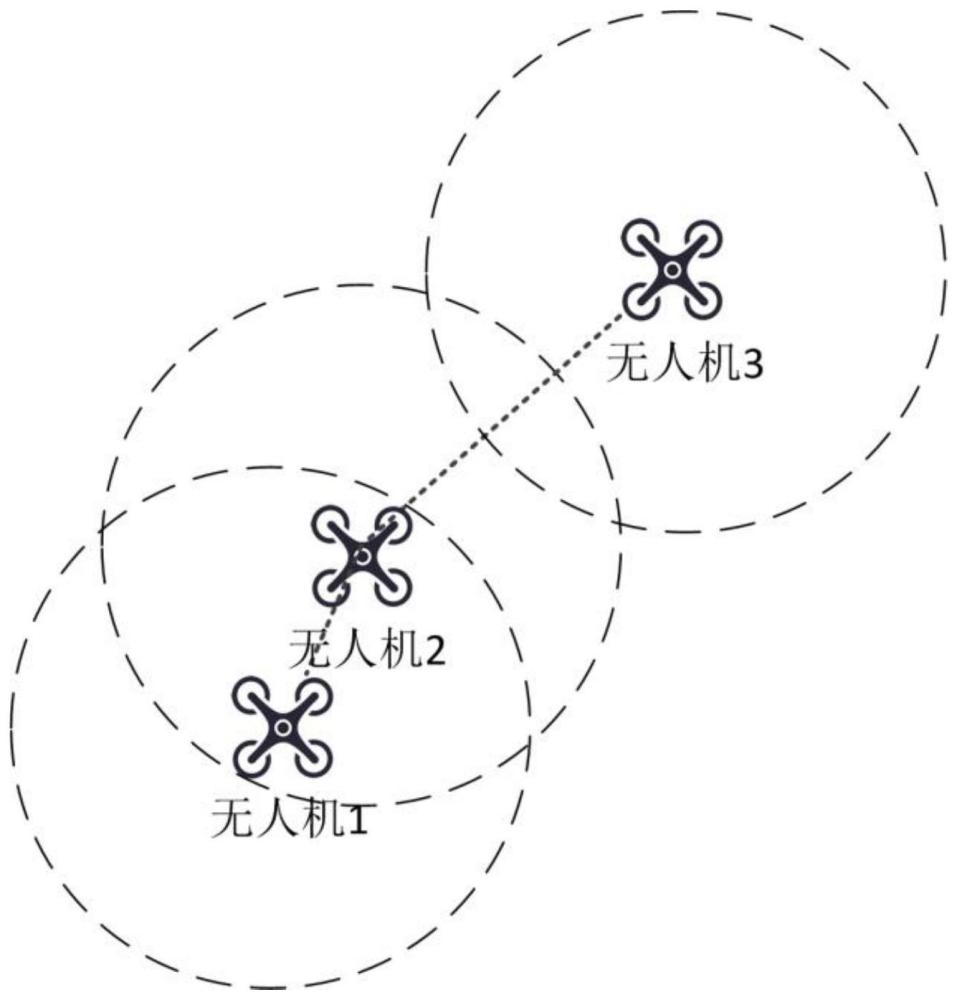
19、步骤401,无人机实时获得与其他无人机之间的通信跳数;
20、步骤402,无人机实时获得集群内中心节点无人机的序号。
21、进一步地,步骤5的具体方式为:
22、步骤501,当与其他无人机处于同一个分布式网络时,向通信跳数为初始通信跳数的无人机发送位置信息;
23、步骤502,当与其他无人机处于同一个集中式网络且两架无人机中有一架是中心节点时,向通信跳数为初始通信跳数的无人机发送位置信息;
24、步骤503,当与其他无人机处于同一个集中式网络且两架无人机都不是中心节点时,向通信跳数为初始通信跳数加1的无人机发送位置信息;
25、步骤504,当与其他无人机处于集中式和分布式组合的网络时,按照上述原则组合计算相应跳数后,向对应无人机发送位置信息;
26、步骤505,对不满足以上条件的无人机不发送位置信息。
27、进一步地,步骤6的具体方式为:
28、步骤601,根据目标的位置,计算无人机的初始运动速度;
29、步骤602,根据障碍物的位置与其他无人机的位置和速度,通过仿生模型,对初始运动速度进行修正,得到无人机的避障飞行速度;
30、步骤603,在无人机集群内复现此过程,实现集群的避障飞行。
31、与现有方法相比,本发明的有益效果在于:
32、1.提供了一种无人机之间距离的分析方法,基于无人机之间的通信跳数判断无人机之间距离的远近。
33、2.提供了一种基于仿生学的无人机集群避障飞行方法,可以实现较少通信资源和计算资源占用下的无人机集群内部无人机位置信息共享及避障飞行,降低了无人机集群避障飞行对通信能力和计算能力的要求。
技术特征:1.一种基于仿生学的无人机集群避障飞行方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于仿生学的无人机集群避障飞行方法,其特征在于,步骤1的具体方式为:
3.根据权利要求1所述的一种基于仿生学的无人机集群避障飞行方法,其特征在于,步骤2的具体方式为:
4.根据权利要求1所述的一种基于仿生学的无人机集群避障飞行方法,其特征在于,步骤4的具体方式为:
5.根据权利要求1所述的一种基于仿生学的无人机集群避障飞行方法,其特征在于,步骤5的具体方式为:
6.根据权利要求1所述的一种基于仿生学的无人机集群避障飞行方法,其特征在于,步骤6的具体方式为:
技术总结本发明提供一种基于仿生学的无人机集群避障飞行方法,属于无人机集群飞行领域。其包括:根据无人机集群任务类型和避障飞行要求,设置无人机集群仿生模型,设置无人机集群通信网络构型并组网,各无人机之间具备位置信息相互通信能力,无人机集群内飞机获得自身位置信息,起飞并执行任务,无人机实时获得当前集群的网络通信状态,根据无人机集群的仿生模型约束和网络通信状态,向满足条件的其他无人机发送位置信息,根据任务目标位置、障碍物位置及当前接收到的其他无人机位置等信息,通过仿生模型进行无人机避障策略计算,实现无人机集群避障飞行。本发明在满足避障飞行要求的前提下,降低了网络通信和避障运算负担。技术研发人员:李晨阳,杨建永,邸成良,柴兴华,陈彦桥,蔡迎哲,张泽勇,李森磊,张宁,李雅,郝亦豪,张秋阳受保护的技术使用者:中国电子科技集团公司第五十四研究所技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240730/200397.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表