海空协同异构无人系统的控制方法、装置、介质和设备
- 国知局
- 2024-08-01 00:19:44
本申请涉及海空异构无人系统联合控制,尤其是涉及到一种海空协同异构无人系统的控制方法、装置、介质和设备。
背景技术:
1、近年来,随着人类工业技术的快速发展,陆地的一些诸如天然气、石油等矿物资源被快速消耗,为了维持人类社会经济的发展,开发利用海洋资源必将成为必然趋势。由无人船-无人机构成的海空协同异构无人系统具有高工作效率和远探测能力,能够较好的应用于海洋资源勘探、海洋搜查营救和海洋边防巡检等任务,因此关于海空协同无人系统控制问题的研究具有重要的现实意义。
2、关于无人船-无人机构成的海空协同异构无人系统,无人船续航时间长、可载性强,但探测范围有限,在充满未知的海域执行危险的任务时将面临巨大风险。相反无人机探测范围广但续航时间有限,将无人船和无人机组建成一种海空异构系统,无人船可以对无人机进行能量补给,无人机可以为无人船提供更广阔的视野并护航,这可以获得更明智的控制决策,和达到更好的作业效果。
3、海空协同异构无人系统在实际的工作环境中,无人船-无人机的模型参数不确定性和复杂未知的海洋环境等各类不确定因素存在给海空无人系统控制的稳定性带来一些难题,如何保证海空无人系统在不确定性下稳定和安全的运行是亟需解决的研究问题。当前比较常见的控制技术有pid控制、鲁棒控制、自适应控制等。pid控制具有调节参数少的优点,但是对于不同场景需要用不同的控制参数,在未知环境下,抗扰能力弱,无法应对因素多变的海洋环境;鲁棒控制具有一定的抗扰能力,但是容易使得控制器信号震荡抖动,对于实际在远离陆地能源的海空无人系统,这种震动的控制信号会很快消耗海空无人系统的能量,续航能力无法得到保证;自适应控制针对不同环境进行自调节,得到控制参数,但计算量大以及会在控制过程中引入较多控制参数,并且在一些突变因素下,自适应控制的参数会变得异常大,导致控制器崩溃,使得实际的海空无人系统控制的安全性无法得到保证。
4、近年来关于海空协同无人系统的研究工作还处于起步阶段,大部分工作只针对单船或单无人机的。目前,常用的手段是使用障碍函数与反步设计方法结合,用来限制误差幅度,获得更好的跟踪精度,但在海空协同无人系统中,障碍函数产生过大的参考信号,容易使得无人机的姿态控制器在将参考信号转换成旋翼转速过程中出现奇异性问题。
技术实现思路
1、有鉴于此,本申请提供了一种海空协同异构无人系统的控制方法及装置、介质和设备,利用饱和控制和视线法规划渴望姿态,避免了姿态解算奇异性问题,并利用规定性能函数和补偿控制设计控制器来提高跟踪精度以及保证安全性,使得海空协同异构无人系统可以精准的完成联合目标跟踪任务。
2、根据本申请的一个方面,提供了一种海空协同异构无人系统的控制方法,包括:
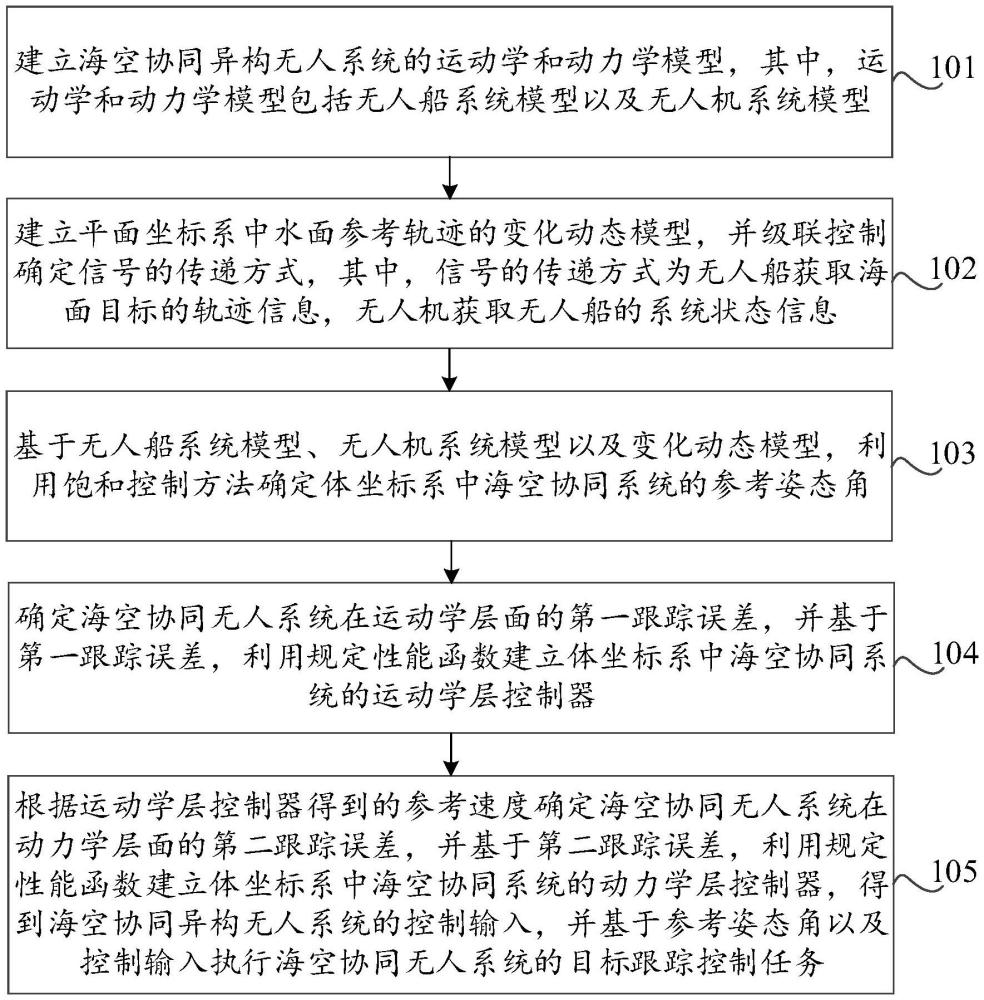
3、建立海空协同异构无人系统的运动学和动力学模型,其中,所述运动学和动力学模型包括无人船系统模型以及无人机系统模型;
4、建立平面坐标系中水面参考轨迹的变化动态模型,并级联控制确定信号的传递方式,其中,所述信号的传递方式为无人船获取海面目标的轨迹信息,无人机获取所述无人船的系统状态信息;
5、基于所述无人船系统模型、无人机系统模型以及所述变化动态模型,利用饱和控制方法确定体坐标系中海空协同系统的参考姿态角;
6、确定所述海空协同无人系统在运动学层面的第一跟踪误差,并基于所述第一跟踪误差,利用规定性能函数建立所述体坐标系中海空协同系统的运动学层控制器;
7、根据所述运动学层控制器得到的参考速度确定所述海空协同无人系统在动力学层面的第二跟踪误差,并基于所述第二跟踪误差,利用所述规定性能函数建立所述体坐标系中海空协同系统的动力学层控制器,得到所述海空协同异构无人系统的控制输入,并基于所述参考姿态角以及所述控制输入执行海空协同无人系统的目标跟踪控制任务。
8、根据本申请的另一方面,提供了一种海空协同异构无人系统的控制装置,所述装置包括:
9、模型构建模块,用于建立海空协同异构无人系统的运动学和动力学模型,其中,所述运动学和动力学模型包括无人船系统模型以及无人机系统模型;
10、参考轨迹构建模块,用于建立平面坐标系中水面参考轨迹的变化动态模型,并级联控制确定信号的传递方式,其中,所述信号的传递方式为无人船获取海面目标的轨迹信息,无人机获取所述无人船的系统状态信息;
11、参考姿态角确定模块,用于基于所述无人船系统模型、无人机系统模型以及所述变化动态模型,利用饱和控制方法确定体坐标系中海空协同系统的参考姿态角;
12、运动学层控制器构建模块,用于确定所述海空协同无人系统在运动学层面的第一跟踪误差,并基于所述第一跟踪误差,利用规定性能函数建立所述体坐标系中海空协同系统的运动学层控制器;
13、动力学层控制器构建模块,用于根据所述运动学层控制器得到的参考速度确定所述海空协同无人系统在动力学层面的第二跟踪误差,并基于所述第二跟踪误差,利用所述规定性能函数建立所述体坐标系中海空协同系统的动力学层控制器,得到所述海空协同异构无人系统的控制输入;
14、系统控制模块,用于基于所述参考姿态角以及所述控制输入执行海空协同无人系统的目标跟踪控制任务。
15、根据本申请又一个方面,提供了一种介质,其上存储有程序或指令,所述程序或指令被处理器执行时实现上述海空协同异构无人系统的控制方法。
16、根据本申请再一个方面,提供了一种设备,包括存储介质和处理器,所述存储介质存储有计算机程序所述处理器执行所述计算机程序时实现上述海空协同异构无人系统的控制方法。
17、借由上述技术方案,本申请建立海空模型系统,选择符合动态变化的参考轨迹,计算获取渴望姿态角,计算渴望参考速度,基于上述已获得的信号,最后计算控制输入,获得的控制输入直接可以送入海空协同异构无人系统的执行器即可完成目标跟踪任务。在具体应用过程中,该实施例通过级联控制框架将无人船与无人机进行联合控制,并利用饱和控制规划无人机的渴望转角,避免了奇异性问题,使控制器具有更好的控制性能。此外,本申请在规定性能控制的基础上,进一步结合了补偿控制,针对海空无人系统联合控制确定了一种基于规定性能的补偿控制方案,提高了控制系统的跟踪精度,并使海空无人系统的跟踪误差维持在预设的性能边界内,保证了控制的稳定性。
18、上述说明仅是本申请技术方案的概述,为了能够更清楚了解本申请的技术手段,而可依照说明书的内容予以实施,并且为了让本申请的上述和其它目的、特征和优点能够更明显易懂,以下特举本申请的具体实施方式。
技术特征:1.一种海空协同异构无人系统的控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,
3.根据权利要求2所述的方法,其特征在于,所述基于所述无人船系统模型、无人机系统模型以及所述变化动态模型,利用饱和控制方法确定体坐标系中海空协同系统的参考姿态角,包括:
4.根据权利要求3所述的方法,其特征在于,所述利用饱和控制方法,根据所述无人机渴望位置得到无人机的渴望位置虚拟控制信号以及虚拟控制信号,包括:
5.根据权利要求3所述的方法,其特征在于,所述第一跟踪误差包括无人船位置跟踪误差、无人船偏航角跟踪误差以及无人机位姿角跟踪误差,所述无人机位姿角跟踪误差包括无人机横滚角跟踪误差、无人机俯仰角跟踪误差以及无人机偏航角跟踪误差;
6.根据权利要求5所述的方法,其特征在于,所述确定所述海空协同无人系统在动力学层面的第二跟踪误差,包括:
7.根据权利要求5所述的方法,其特征在于,所述基于所述第二跟踪误差建立所述体坐标系中海空协同系统的动力学层控制器,得到所述海空协同异构无人系统的控制输入,包括:
8.一种海空协同异构无人系统的控制装置,其特征在于,所述装置包括:
9.一种存储介质,其上存储有程序或指令,其特征在于,所述程序或指令被处理器执行时实现如权利要求1至7中任一项所述的方法。
10.一种电子设备,包括存储介质和处理器,其特征在于,所述存储介质存储有计算机程序,所述处理器执行所述计算机程序时实现权利要求1至7中任一项所述的方法。
技术总结本申请涉及无人系统协同控制领域,公开了一种海空协同异构无人系统的控制方法、装置、介质和设备。方法包括:构建海空协同无人系统的运动学和动力学模型;通过级联法构建海空协同无人系统的信号通讯关系;利用饱和控制方法和视线法规划无人船和无人机的渴望姿态角;构建规定性能函数约束跟踪误差设计渴望虚拟速度;基于性能函数构建补偿器;基于渴望虚拟速度和补偿器设计海空协同异构无人系统联合规定性能控制器;确定设计的规定性能控制框架的稳定性;确定设计的控制框架布置在海空无人系统执行工作的有效性。本发明具有较好的跟踪性能,可以使海空协同异构无人系统较好的完成联合目标跟踪任务。技术研发人员:陈广均,董久祥受保护的技术使用者:东北大学技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240730/200619.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。