地图摆正方法与流程
- 国知局
- 2024-08-01 00:22:31
本发明涉及机器人,尤其涉及地图摆正方法。
背景技术:
1、现有技术中,清洁机器人可以通过激光雷达测距技术创建周围环境的地图,以便于后续清洁过程的定位与导航。然而,清洁机器人初始构建地图的正方向通常以自身的第一视角为准,清洁机器人由于初始位姿不同,同一片区域所对应的地图,在初始成型或根据初始位姿进行摆正后所对应的朝向并不一致,这致使用户终端所接收到的地图朝向各异,对用户终端的显示单元也提出了极大的挑战。
2、在现有技术中,清洁机器人通常采用slam(simultaneous localization andmapping,即时定位与地图构建)技术,构建该清洁机器人周围环境对应的地图。然而,清洁机器人在构建地图时,通常是以清洁机器人启动时的初始位置为起始点开始构建地图的,这种方式构建出的地图可能存在一定的倾斜,该倾斜的地图不便于后续的定位与运动决策,从而影响清洁机器人的工作效率。
3、因而,目前亟需能够对地图进行摆正的方法,在保障摆正结果的一致性的前提下,降低显示单元的完整显示难度,从而使用户获得摆正后的地图,降低了用户理解地图的难度。
技术实现思路
1、本发明的目的在于提供地图摆正方法,以实现对地图的摆正操作,规范了地图的调整方式,使地图能够适应用户的观察习惯,有助于降低地图的完整显示难度。
2、为达此目的,本发明采用以下技术方案:
3、地图摆正方法,包括以下步骤:
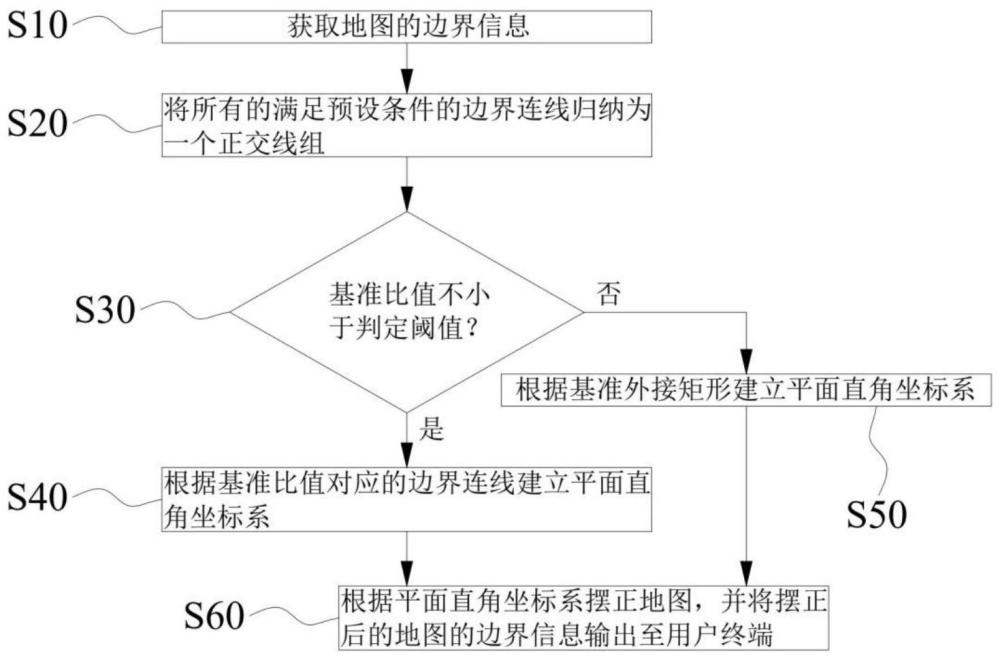
4、s10:获取地图的边界信息,所述边界信息包括边界连线的状态信息和边界总长,所述边界总长被配置为所有的所述边界连线的长度之和;
5、s20:将所有的满足预设条件的所述边界连线归纳为一个正交线组;
6、s30:判断基准比值与判定阈值的关系,若满足第一关系,则进行s40,若满足第二关系,则进行s50;所述基准比值为最大的边界连线线长与所述边界总长的比值,所述边界连线线长被定义为一个所述正交线组中所有所述边界连线的长度之和;
7、s40:根据第一基准建立平面直角坐标系,然后进行s60;
8、s50:根据第二基准建立平面直角坐标系,然后进行s60;
9、s60:根据所述平面直角坐标系摆正所述地图,并将摆正后的所述地图的所述边界信息输出至用户终端。
10、作为地图摆正方法的优选技术方案,所述预设条件为相互存在平行、共线或垂直关系的所述边界连线。
11、作为地图摆正方法的优选技术方案,所述第一关系为所述基准比值不小于所述判定阈值,所述第二关系为所述基准比值小于所述判定阈值;所述第一基准为所述基准比值对应的所述边界连线,所述第二基准为基准外接矩形。
12、作为地图摆正方法的优选技术方案,s20包括以下详细步骤:
13、s21:选取任一所述边界连线作为定位连线;
14、s22:将所有与所述定位连线平行、共线或垂直的所述边界连线作为正交连线,将所述定位连线与所有的所述正交连线之和作为所述边界连线线长,计算并记录所述边界连线线长;
15、s23:重复选取所述定位连线并计算对应的所述边界连线线长,直至无法再选取出所述定位连线,以计算并记录完所有的所述边界连线线长;
16、s24:比较并选出所有的所述边界连线线长中最大的一个,计算最大的所述边界连线线长与所述边界总长的比值,作为所述基准比值。
17、作为地图摆正方法的优选技术方案,s23包括以下详细步骤:
18、s231:判断是否存在既未作为过所述定位连线又未作为过所述正交连线的所述边界连线,若是,则进行s232,若否,则进行s24;
19、s232:选取任一既未作为过所述定位连线又未作为过所述正交连线的所述边界连线,将其替换为所述定位连线,然后再次进行s22。
20、作为地图摆正方法的优选技术方案,s50包括以下详细步骤:
21、s51:建立外接平面直角坐标系,利用两条平行于所述外接平面直角坐标系的x轴的长边和两条平行于所述外接平面直角坐标系的y轴的短边,生成所述边界连线所围成图形的外接矩形,将所述外接矩形的面积作为测试面积,计算并记录所述测试面积;
22、s52:多次将所述外接平面直角坐标系旋转预定角度,选取不同的所述外接平面直角坐标系并计算对应的所述测试面积,直至所述外接平面直角坐标系旋转90°,以计算并记录完所有的所述测试面积;
23、s53:比较所有的所述测试面积,将所有的所述测试面积中最小的一个所述外接矩形作为所述基准外接矩形。
24、作为地图摆正方法的优选技术方案,在s10之后还包括以下步骤:
25、s11:查找指定基准;
26、s12:判断是否存在所述指定基准,若是,则根据所述指定基准摆正所述地图,并将摆正后的所述地图的所述边界信息输出至所述用户终端,若否,则进行s20。
27、作为地图摆正方法的优选技术方案,在s20之前还包括以下步骤:
28、s18:判断最长的所述边界连线的长度与所述边界总长的比值是否不小于所述判定阈值,若是,则进行s19,若否,则进行s20;
29、s19:以最长的所述边界连线为基准,建立平面直角坐标系,然后进行s60。
30、作为地图摆正方法的优选技术方案,在s30之前还包括以下步骤:
31、s28:判断是否存在具有至少两条所述边界连线的所述正交线组,若是,则进行s30,若否,则进行s50。
32、作为地图摆正方法的优选技术方案,在s30之前还包括以下步骤:
33、s29:判断是否存在至少两个并列最大的所述边界连线线长,若是,则进行s50,若否,则进行s30。
34、本发明的有益效果:
35、该地图摆正方法通过将地图上的边界连线提取并区分为不同正交线组的方式,能够获得每个正交线组的边界连线线长。计算出其中最大的边界连线线长与边界总长的比值后,与判定阈值进行比较,从而对地图摆正的基准确定方式进行判断。以上设计达到了确定平面直角坐标系的目的,进而得以完成对地图的摆正流程,最后根据确定的平面直角坐标系摆正地图,并将摆正后的地图通过用户终端呈现给用户。上述方法通过对基准比值大小的判断,决定了平面直角坐标系,从而实现了对地图的摆正操作,规范了地图的调整方式,使地图能够适应用户的观察习惯,有助于降低地图的完整显示难度。
技术特征:1.地图摆正方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的地图摆正方法,其特征在于,所述预设条件为相互存在平行、共线或垂直关系的所述边界连线。
3.根据权利要求2所述的地图摆正方法,其特征在于,所述第一关系为所述基准比值不小于所述判定阈值,所述第二关系为所述基准比值小于所述判定阈值;所述第一基准为所述基准比值对应的所述边界连线,所述第二基准为基准外接矩形。
4.根据权利要求3所述的地图摆正方法,其特征在于,s20包括以下详细步骤:
5.根据权利要求4所述的地图摆正方法,其特征在于,s23包括以下详细步骤:
6.根据权利要求3所述的地图摆正方法,其特征在于,s50包括以下详细步骤:
7.根据权利要求1所述的地图摆正方法,其特征在于,在s10之后还包括以下步骤:
8.根据权利要求1所述的地图摆正方法,其特征在于,在s20之前还包括以下步骤:
9.根据权利要求1所述的地图摆正方法,其特征在于,在s30之前还包括以下步骤:
10.根据权利要求1-9任一项所述的地图摆正方法,其特征在于,在s30之前还包括以下步骤:
技术总结本发明涉及机器人技术领域,具体公开了地图摆正方法。该方法包括以下步骤:获取地图的边界信息,边界信息包括边界连线的状态信息和边界总长,边界总长为所有的边界连线的长度之和;将所有的满足预设条件的边界连线归纳为一个正交线组;判断基准比值与判定阈值的关系,若满足第一关系,则根据第一基准建立平面直角坐标系,若满足第二关系,则根据第二基准建立平面直角坐标系;基准比值为最大的边界连线线长与边界总长的比值,边界连线线长被定义为一个正交线组中所有边界连线的长度之和;根据平面直角坐标系摆正地图,并将摆正后的地图的边界信息输出至用户终端。该方法通过对基准比值大小的判断,决定了平面直角坐标系,完成了对地图的摆正。技术研发人员:刘济晗,胡浪受保护的技术使用者:浙江白马科技有限公司技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240730/200818.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表